






此篇文章主要介绍上一篇论文的案例研究部分,背景和理论部分请看上一篇文章(点击阅读原文)。
文章信息
《Learning Traffic as Images: A Deep Convolutional Neural Network for Large-Scale Transportation Network Speed Prediction》。
北航马晓磊老师2017年发在开源期刊Sensor上的一篇文章(大类工程技术3区,IF:2.475),被引168次。
案例研究
从上篇文章得知,本文的输入为:
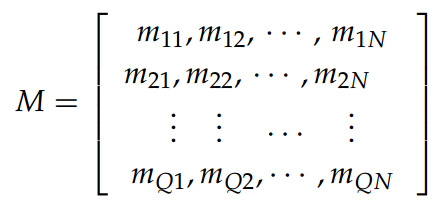
N为时间间隔的长度,Q为路段的长度,像素mij是第i路段在j时刻的平均交通速度。设x轴和y轴分别表示矩阵的时间和空间。生成的矩阵可以看作是图像的一个通道channel,因此,图像的宽度为M像素,高度为N像素。
实验数据:北京市2015年5月1号到6月6号出租车GPS数据,定位间隔约为1分钟,利用该轨迹数据获取某个路段某个时间段(本文2分钟)的平均交通速度得到上述矩阵。
本文选取了两个交通网络,一个是二环路(单向,236个路段),一个是东北部的一个子网络(部分双向,352个路段)。进行了4次实验,task1-task4.
Task 1: 使用过去30分钟的交通速度预测未来10分钟;
Task 2: 使用过去40分钟的交通速度预测未来10分钟;
Task 3: 使用过去30分钟的交通速度预测未来20分钟;
Task 4: 使用过去40分钟的交通速度预测未来10分钟.
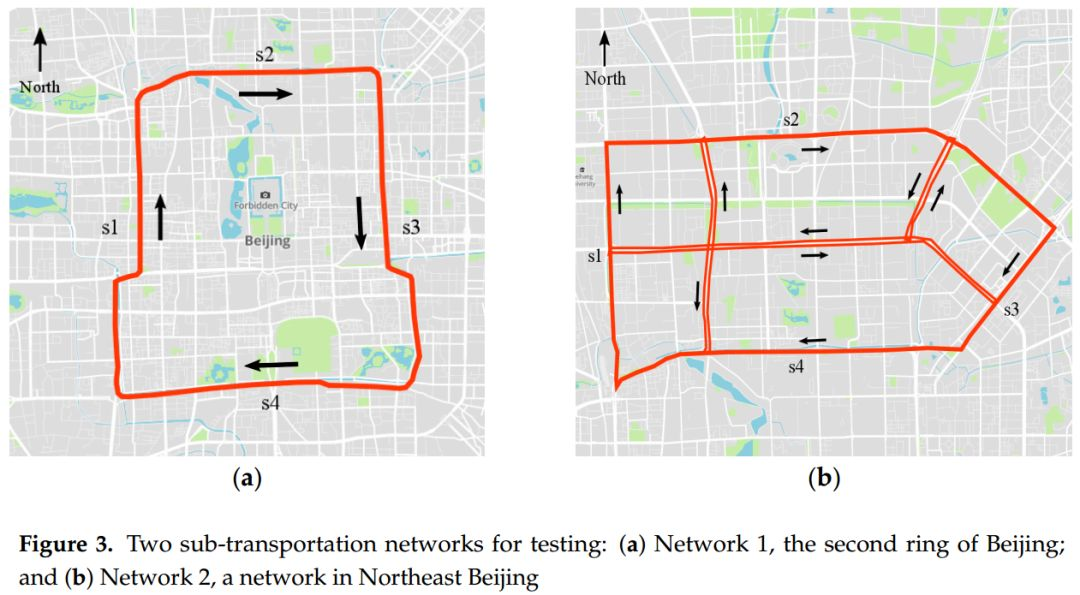
为了获取交通速度矩阵,第一个网络直接拉直即可,第二个是把网络切割成一段一段的交通直线然后按顺序放置。
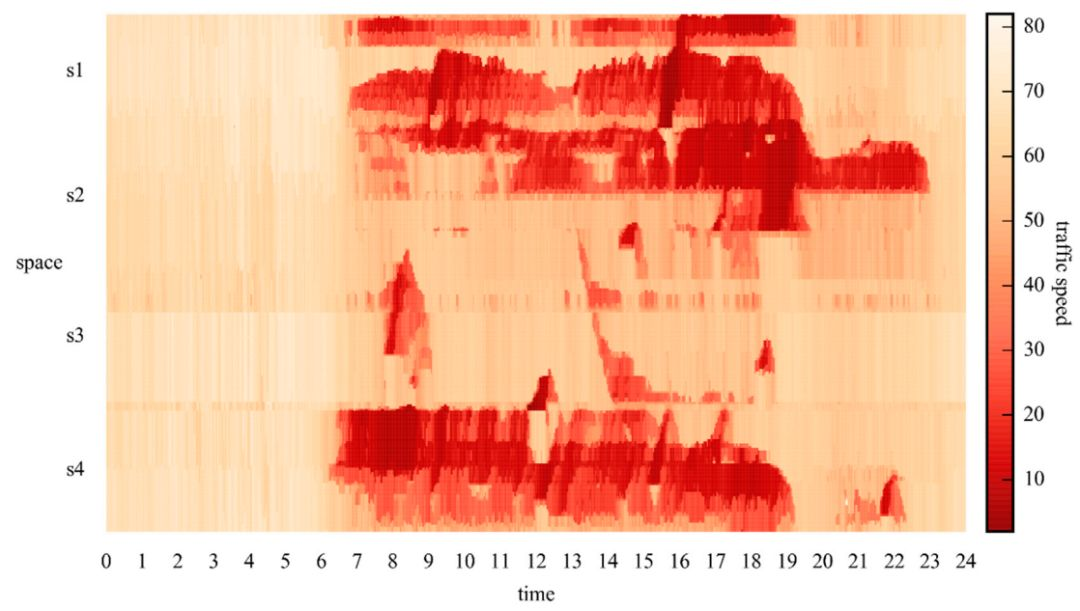
一天的数据处理成一张图片后共37张图片,如下图,横轴为时间,纵轴为各个路段。越红代表速度越低越拥挤。
CNN参数:
Filter size=(3, 3), Pooling size=(2, 2), filter 分别为256,128,64个; 训练集为前30天的21600个样本(2分钟一个样本,一个小时30个,一天24*30=720个,30天720*30=21600个),测试集为后7天5040个样本。
预测结果:
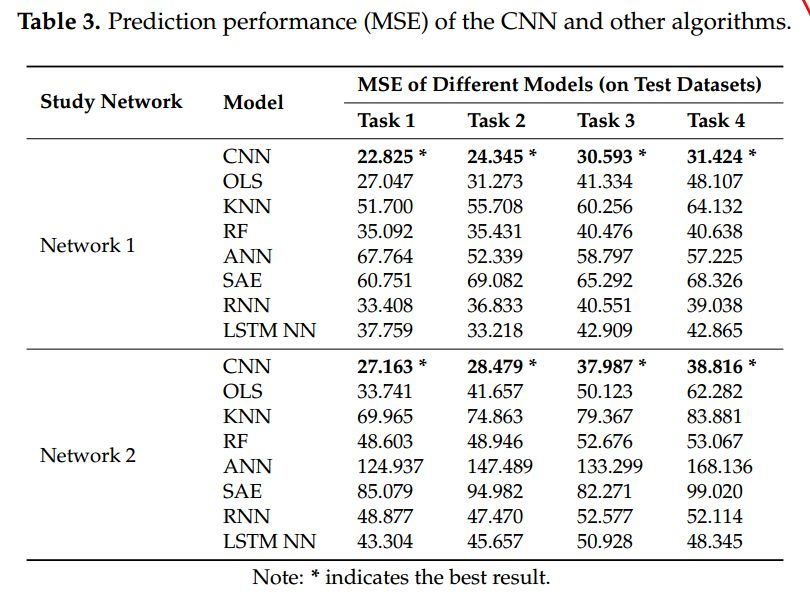
一直感觉这种比较就是自欺欺人,但是还得比较~
展望
文章一直在强调两点:
1,CNN不同于普通的全连接层,由于滤波器filter的存在,CNN能够提取局部特征。文章使用了数百个filter,一个filter可以能够提取1个交通特征,因此,对一个输入层,数百个filter就可以提取数百个交通特征。
2,池化层的设计目的是缩小采样和聚合数据,因为它们只从特定区域提取显著的数字。池化层保证CNN是局部不变的,这意味着不论是否进行特征移动、旋转或缩放CNN总是可以从输入中提取相同的特征。
借鉴意义:要反复强调自己的创新点。
Attention
如果你和我一样是轨道交通、交通运输、城市规划相关领域的,也愿意分享自己的科研生活,请加下面的二维码扫码进群,人数满员后加微信:Dr_JinleiZhang,备注“进群”,我会拉你进交通大数据分享群!不愿意分享的请勿打扰哈!希望我们共同进步!



Transportation-ML
与你分享科研成长的乐趣
长按二维码关注


















 785
785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











