







 本文详细介绍了Unity中Quaternion类的使用,包括四元数的API、旋转表示方法(欧拉角、前方上方矢量、绕轴旋转、相对旋转)、成员变量和函数。通过示例说明了如何通过四元数进行旋转操作,如LookRotation、Slerp等,并通过代码验证了前方上方矢量表示法的正确性。最后,展示了如何应用四元数于子弹射击的场景中。
本文详细介绍了Unity中Quaternion类的使用,包括四元数的API、旋转表示方法(欧拉角、前方上方矢量、绕轴旋转、相对旋转)、成员变量和函数。通过示例说明了如何通过四元数进行旋转操作,如LookRotation、Slerp等,并通过代码验证了前方上方矢量表示法的正确性。最后,展示了如何应用四元数于子弹射击的场景中。
Unity中关于四元数的API详解
Quaternion类
Quaternion(四元数)用于计算Unity旋转。它们计算紧凑高效,不受万向节锁的困扰,并且可以很方便快速地进行球面插值。 Unity内部使用四元数来表示所有的旋转。
Quaternion是基于复数,并不容易直观地理解。 不过你几乎不需要访问或修改单个四元数参数(x,y,z,w); 大多数情况下,你只需要获取和使用现有的旋转(例如来自“Transform”),或者用四元数来构造新的旋转(例如,在两次旋转之间平滑插入)。
大部分情况下,你可能会使用到这些函数:
- Quaternion.LookRotation,
- Quaternion.Angle
- Quaternion.Euler
- Quaternion.Slerp
- Quaternion.FromToRotation
- Quaternion.identity。
Quaternion 是一个结构体,本身成员变量相对简单,可以作为函数参数高效传递。
Unity默认方向
在深入了解API之前,我们需要先明确一些基本的概念,就是方向、旋转究竟是如何表示的。
Unity中使用左手坐标系,假如把世界坐标系跟东南西北进行结合起来看,大致如下图所示:
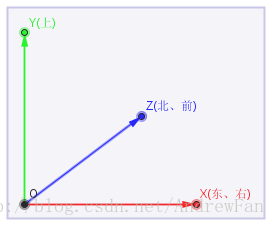
默认的方向对应如下表:
| 坐标轴 | 对应方向 |
|---|---|
| +x | 右(东) |
| -x | 左(西) |
| +y | 上 |
| -y | 下 |
| +Z | 前(北) |
| -Z | 后(南) |
假设以你自己身体为例,你站立在地面上,面朝北方,此时就是默认方向,也就是Unity中的方向就是面向+Z轴方向,那么此时+X轴在东方,+Y轴对应正上方。此时对应的欧拉角是(0,0,0),此时对应的前方矢量是(0,0,1),上方矢量是(0,1,0)。
这里我区分了左右上下前后的概念,因为这些概念同时也对应了Vector3类、Transform类中的相应的方向函数。
方向的表示法
①欧拉角表示法
假如你使用一组欧拉角表示旋转,XYZ三个参数代表相应轴向按照顺归YZX的旋转,因此(0、90、90)代表先进行+Z轴旋转90度,再沿着+Y轴进行90度旋转,更多详细内容可以参考前述文章《【Unity编程】Unity中的欧拉旋转》。
②前方上方矢量界定法
编程过程中,大部分需要明确指定方位的时候就需要使用这个方法。要确定一个朝向,我们可以使用两个向量来确定:即前方矢量和上方矢量。当一个朝向的前方和上方确定之后,这个朝向也就完全确定了。
举例来说,如果现在只提供一个朝向,就是你现在面朝北方,那么这个方向已经完全确定了吗?显然没有。因为你右侧躺在地上,看向北方,还是在面朝北方,这时候就需要另外一个矢量,也就是上方。当给出上方之后,这个朝向就完全确定了。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









