







**
Ubuntu上配置jdk
**
1. 从oracle官网上下载需要的jdk版本
2. 经过解压的操作后,打开~/.bashrc进行系统路径的修改
export JAVA_HOME=xxxx/jdkxxx
export CLASSPATH=${JAVA_HOME}/lib
export PATH= ${JAVA_HOME}/bin: $PATH
3. source ~/.bashrc
4. 使用java –version进行验证
Ubuntu上配置eclipse
这个没什么好讲的,首先到eclipse的官网上去下载C/C++可用的eclipse,之后再解压就可以直接用了。如果你想直接在terminal上使用eclipse指令,可以通过
echo “export /eclipse路径:$PATH”>>~/.bashrc
. ~/.bashrc
eclipse配置ROS环境
由于我所使用的rosbuild,故采用下述的步骤,采用catkin方式的可以参考http://blog.csdn.net/u013494117/article/details/52350752这篇文章
1. 创建一个ros工作空间和ros的包
2. 将ros工作空间的路径加入到ROS_PACKAGE_PATH中
3. 到功能包的路径下进行eclipse-project的生成,make eclipse-project,使用ls –al能看到.project的生成
4. 如果是创建多个eclipse-project的话则使用rosmake –targe=eclipse-project –specified-only *
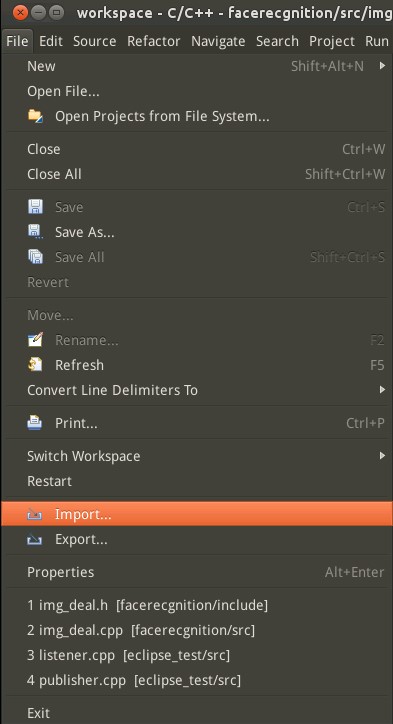
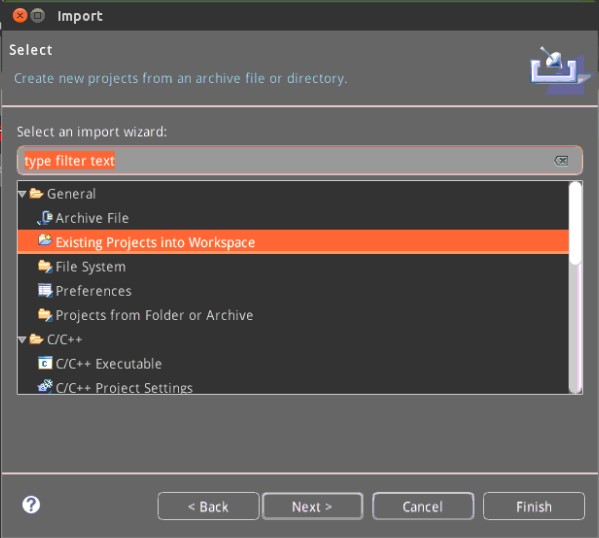
5. 接着打开eclipse,通过File->import->exist project into workspace
6.在src文件夹下创建自己的节点程序(也可以在一开始就导入自己的功能包,这里我导入了之前编写的人脸检测的程序faceregnition)
7. 在eclipse中build自己的project需要进行环境的配置,右键项目->properties->C/C++Make Project->Environment加入ROS_ROOT, ROS_PACKAGE_PATH,PYTHONPATH,PATH的路径
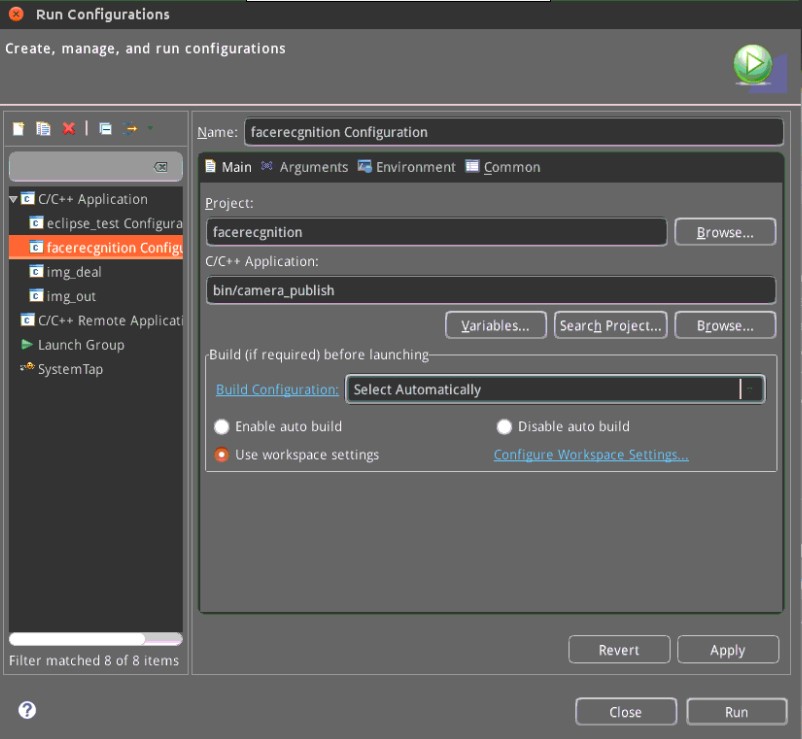
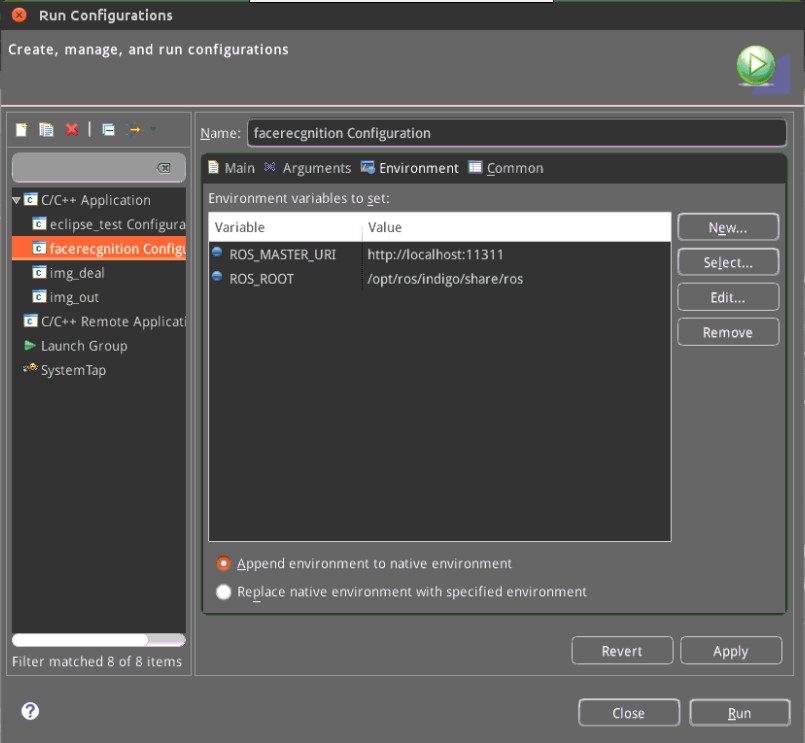
8. 在eclipse中如果需要调整和运行程序的话需要对run进行设置,点 击 run->run configuration,双击其中的C/C++ Application,选择要运行的节点(生成的可执行文件),在Environment中添加ROS_ROOT和ROS_MASTER_URI变量,可以用echo $ROS_ROOT和echo $ROS_MASTER_URI进行查看
9.在terminal中运行roscore,之后在eclipse中run相应的节点即可
10. 运行的结果在控制台console中显示
11. 其他的还有一些代码显示的改进可以在http://wiki.ros.org/IDEs 上进行查看















 595
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









