







 本文介绍在Ubuntu 14.04上安装配置PCL 1.8、OpenCV 3.1及OpenNI 2.0的过程,用于实现基于ARM架构的室内三维重建。涵盖依赖包安装、源码编译、测试验证等关键步骤。
本文介绍在Ubuntu 14.04上安装配置PCL 1.8、OpenCV 3.1及OpenNI 2.0的过程,用于实现基于ARM架构的室内三维重建。涵盖依赖包安装、源码编译、测试验证等关键步骤。
最近入手NvidiaTegra 1 开发板,ARM架构的,做室内三维重建用。今天就讲讲的PCL 1.8+ OPENCV3.1 + OPENNI2.0在ubuntu14.04 上的安装与编译。
更新ubuntu的armhf源,修改source.list,中科大的快!
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-proposed main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-proposed main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ trusty-backports main restricted universe multiverse
一、 Opencv
这个网上有很多教程,
1. 安装依赖包和预备环境
$sudo apt-get install build-essential
$sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
$sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
2.从官网下载opencv3.1源码,并解压
3.创建编译目录,编译
$cd ~/opencv-3.1.0
$mkdir release
$cd release
$cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..
$make
$sudo make install
4.测试opencv
$mkdir ~/opencv-lena
$cd ~/opencv-lena
$gedit DisplayImage.cpp
#include <stdio.h>
#include <opencv2/opencv.hpp>
using namespace cv;
int main(int argc, char** argv )
{
if ( argc != 2 )
{
printf("usage: DisplayImage.out <Image_Path>\n");
return -1;
}
Mat image;
image = imread( argv[1], 1 );
if ( !image.data )
{
printf("No image data \n");
return -1;
}
namedWindow("Display Image", WINDOW_AUTOSIZE );
imshow("Display Image", image);
waitKey(0);
return 0;
}
创建cmakelist编译文件
cmake_minimum_required(VERSION 2.8)
project( DisplayImage )
find_package( OpenCV REQUIRED )
add_executable( DisplayImage DisplayImage.cpp )
target_link_libraries( DisplayImage ${OpenCV_LIBS} )
执行:
$cd ~/opencv-lena
$cmake .
$make
$./DisplayImage lena.jpg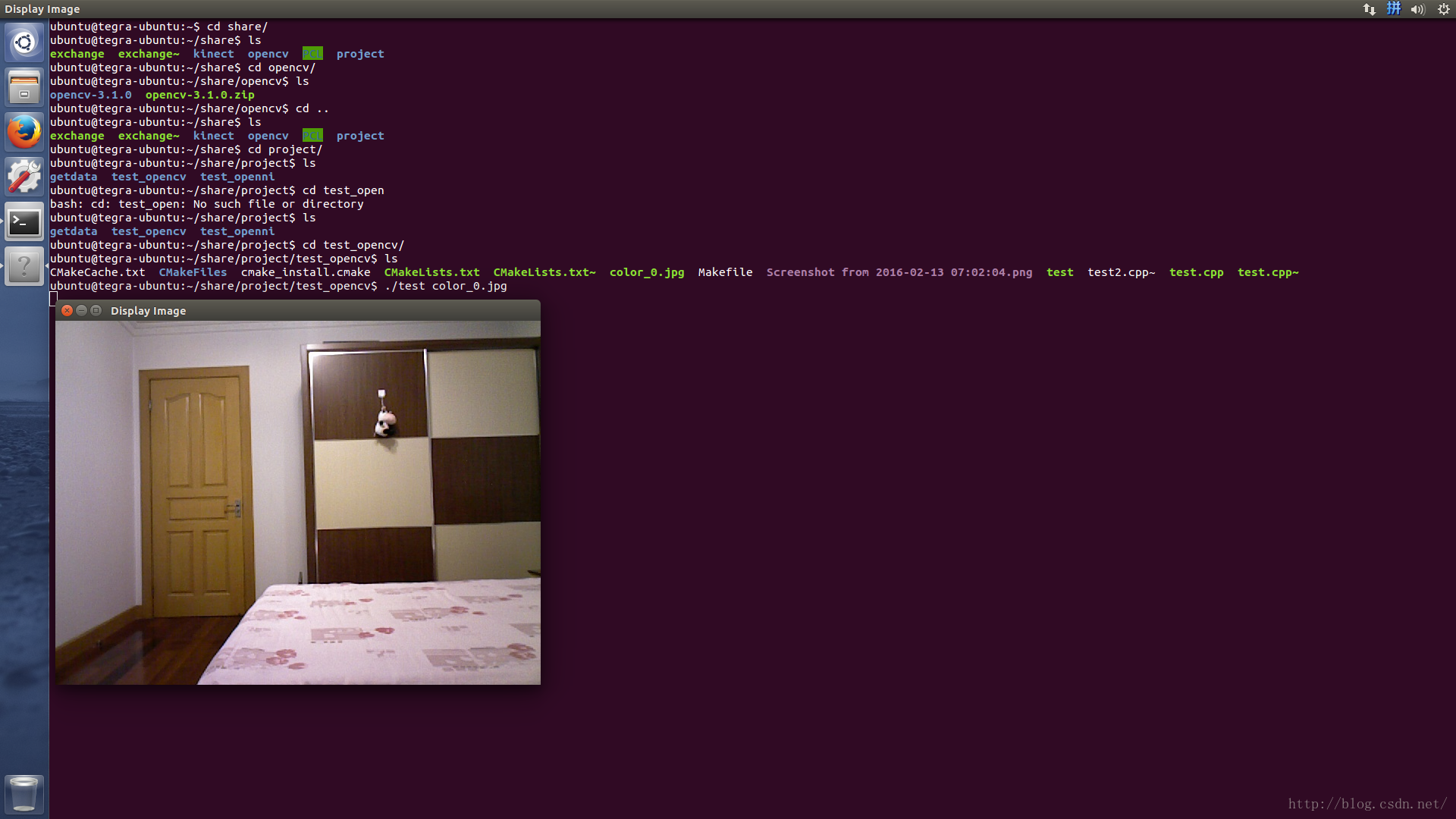
至此opencv配置完毕
二、openni2.0
以下内容是我在youtube上看到的视频:
https://www.youtube.com/watch?v=Bn9WqbYtNBw
1.安装 OpenNI2依赖项
$sudo apt-get install -y g++ python libusb-1.0-0-dev freeglut3-dev doxygen graphviz
$sudo apt-get install libudev-dev
2.从github将openni2源码clone下来
$git clone https://github.com/occipital/OpenNI2.git
$cd OpenNI2
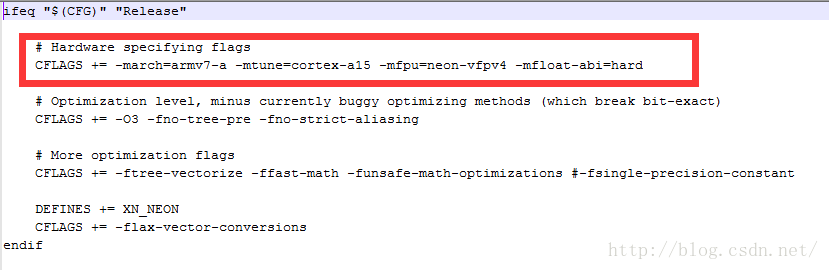
3.修改两处配置Platform.Arm和CommonCppMakefile,适用于arm设备
$gedit ThirdParty/PSCommon/BuildSystem/Platform.ArmChange:
CFLAGS+= -march=armv7-a -mtune=cortex-a9 -mfpu=neon -mfloat-abi=softfp#-mcpu=cortex-a8
to:
CFLAGS+= -march=armv7-a -mtune=cortex-a15 -mfpu=neon-vfpv4 -mfloat-abi=hard
$gedit ThirdParty/PSCommon/BuildSystem/CommonCppMakefile---OpenNI2-2.2.0.30/ThirdParty/PSCommon/BuildSystem/CommonCppMakefile.old2014-03-28 19:09:11.572263107 -0700
+++OpenNI2-2.2.0.30/ThirdParty/PSCommon/BuildSystem/CommonCppMakefile 2014-03-2819:09:55.600261937 -0700
@@-95,6 +95,9 @@
OUTPUT_NAME= $(EXE_NAME)
# Wewant the executables to look for the .so's locally first:
LDFLAGS+= -Wl,-rpath ./
+ifneq ("$(OSTYPE)","Darwin")
+LDFLAGS += -lpthread
+endif
OUTPUT_COMMAND= $(CXX) -o $(OUTPUT_FILE) $(OBJ_FILES) $(LDFLAGS)
endif
ifneq "$(SLIB_NAME)" ""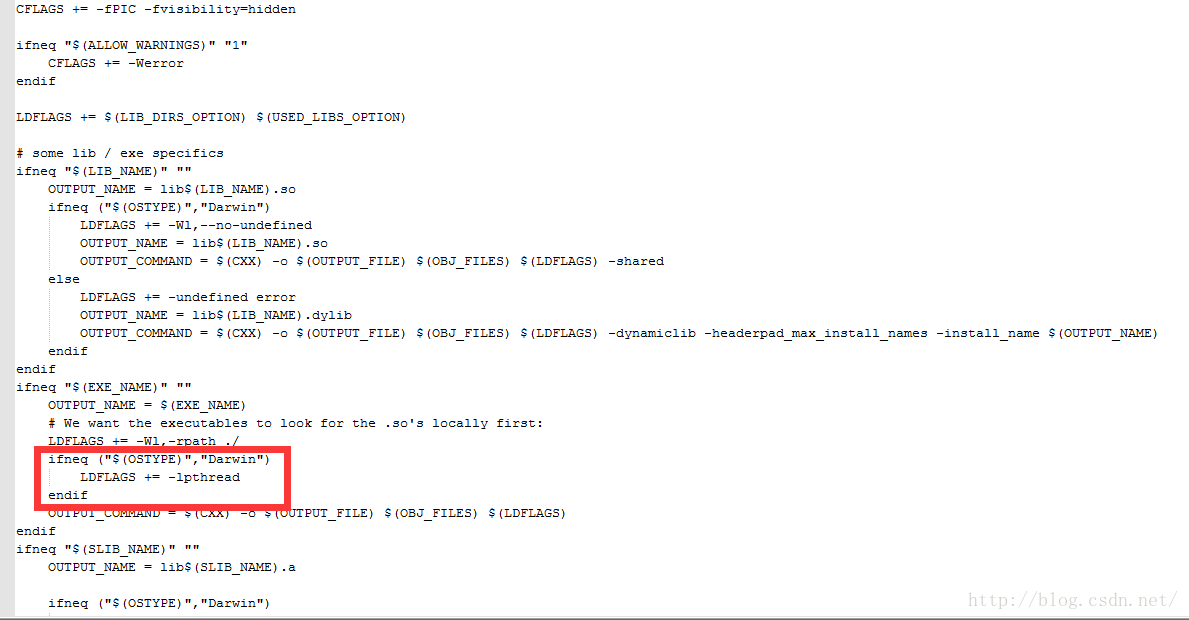
4.修改makefile,增加sample,即在makefile文件末尾添加:
core_samples: $(CORE_SAMPLES)
tools: $(ALL_TOOLS)
5.编译
$make
$make core_samples # this probably isn't necessary, they should already be built
$GLUT_SUPPORTED=1 make tools#GLUT_SUPPORTED tells the make to compile NiViewer for OpenGL
6.安装libfreenect,否则无法驱动primesensor
安装依赖项
$sudo apt-get install cmake freeglut3-dev pkg-config build-essential libxmu-dev libxi-dev libusb-1.0-0-dev –y下载源码并编译
$ git clone git://github.com/OpenKinect/libfreenect.git
$ cd libfreenect
$ mkdir build
$ cd build
$ cmake ..
$ make
$ sudo make install
# Build the OpenNI2 driver
$ cmake .. -DBUILD_OPENNI2_DRIVER=ON
$ make
将libfreenect的so拷贝到OpenNI的驱动文件夹下
$ Repository=../../Bin/Arm-Release/OpenNI2/Drivers
$ cp -L lib/OpenNI2-FreenectDriver/libFreenectDriver* ${Repository}
设置使用传感器的权限
$ sudo usermod -a -G video Ubuntu7. 回到 openni2 目录,将头文件和 so 文件拷贝到 /usr 目录下
$ sudo cp -r Include /usr/include/openni2
$ sudo cp -r Bin/Arm-Release/OpenNI2 /usr/lib/
$ sudo cp Bin/Arm-Release/libOpenNI2.* /usr/lib/
8. 创建 packageconfig 文件
# this will enable ubuntu to find the location of the drivers, libraries and include files.
$ sudo gedit /usr/lib/pkgconfig/libopenni2.pc
and fill it with this:
prefix=/usr
exec_prefix=${prefix}
libdir=${exec_prefix}/lib
includedir=${prefix}/include/openni2
Name: OpenNI2
Description: A general purpose driver for all OpenNI cameras.
Version: 2.2.0.0
Cflags: -I${includedir}
Libs: -L${libdir} -lOpenNI2 -L${libdir}/OpenNI2/Drivers -lDummyDevice -lOniFile -lPS1080.so
检验:
# To make sure it is correctly found, run
$ pkg-config --modversion libopenni2
# which should give the same version as defined in the file above (2.2.0.0)
最后一步:
# Linux has used the udev system to handle devices such as USB connected peripherals.
$ cd Packaging/Linux
$ sudo cp primesense-usb.rules /etc/udev/rules.d/557-primesense-usb.rules
翻译的如果卡不懂和其他注意事项,
请直接看:http://jetsonhacks.com/2014/08/28/building-openni2-structure-sensor/
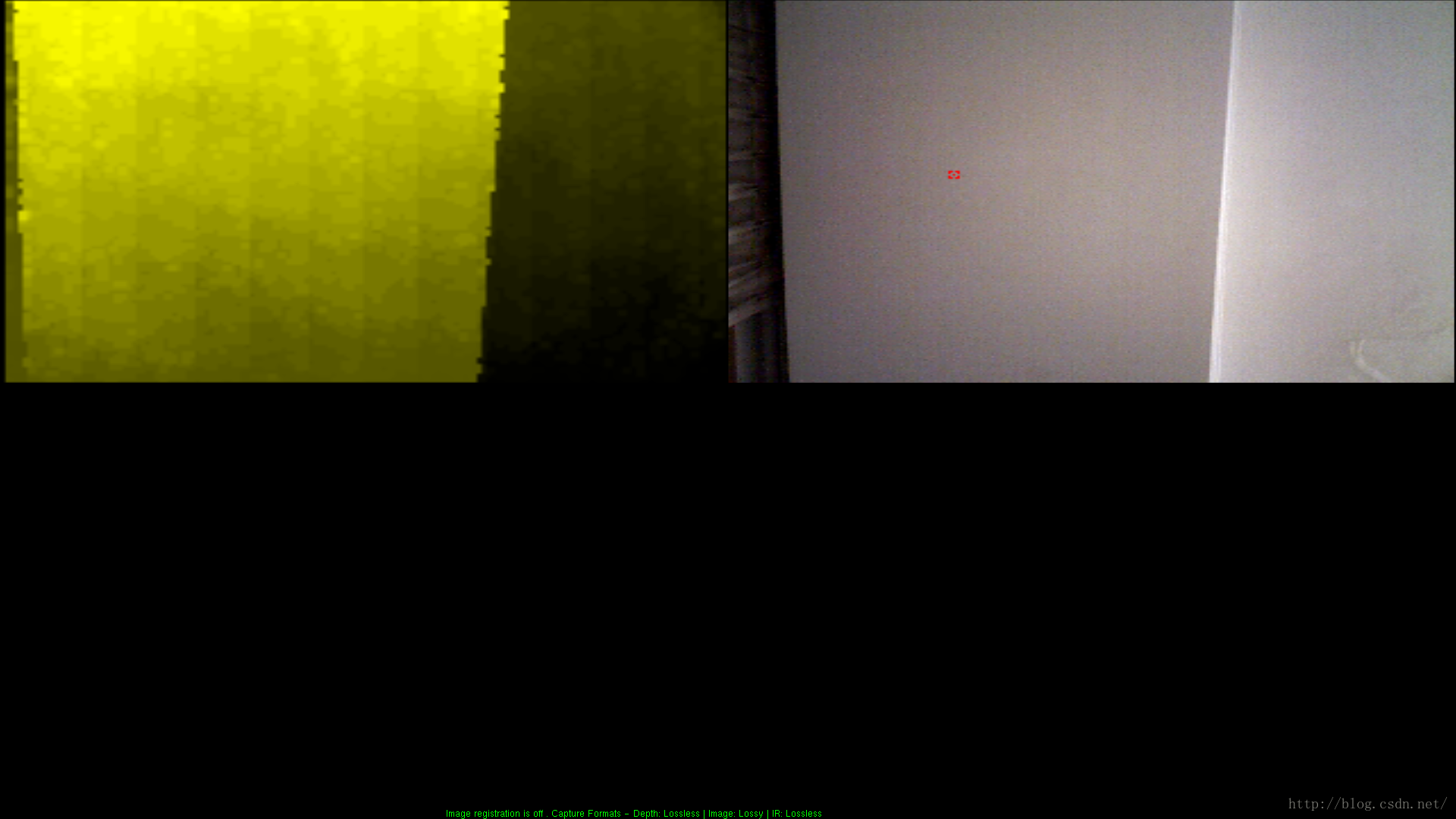
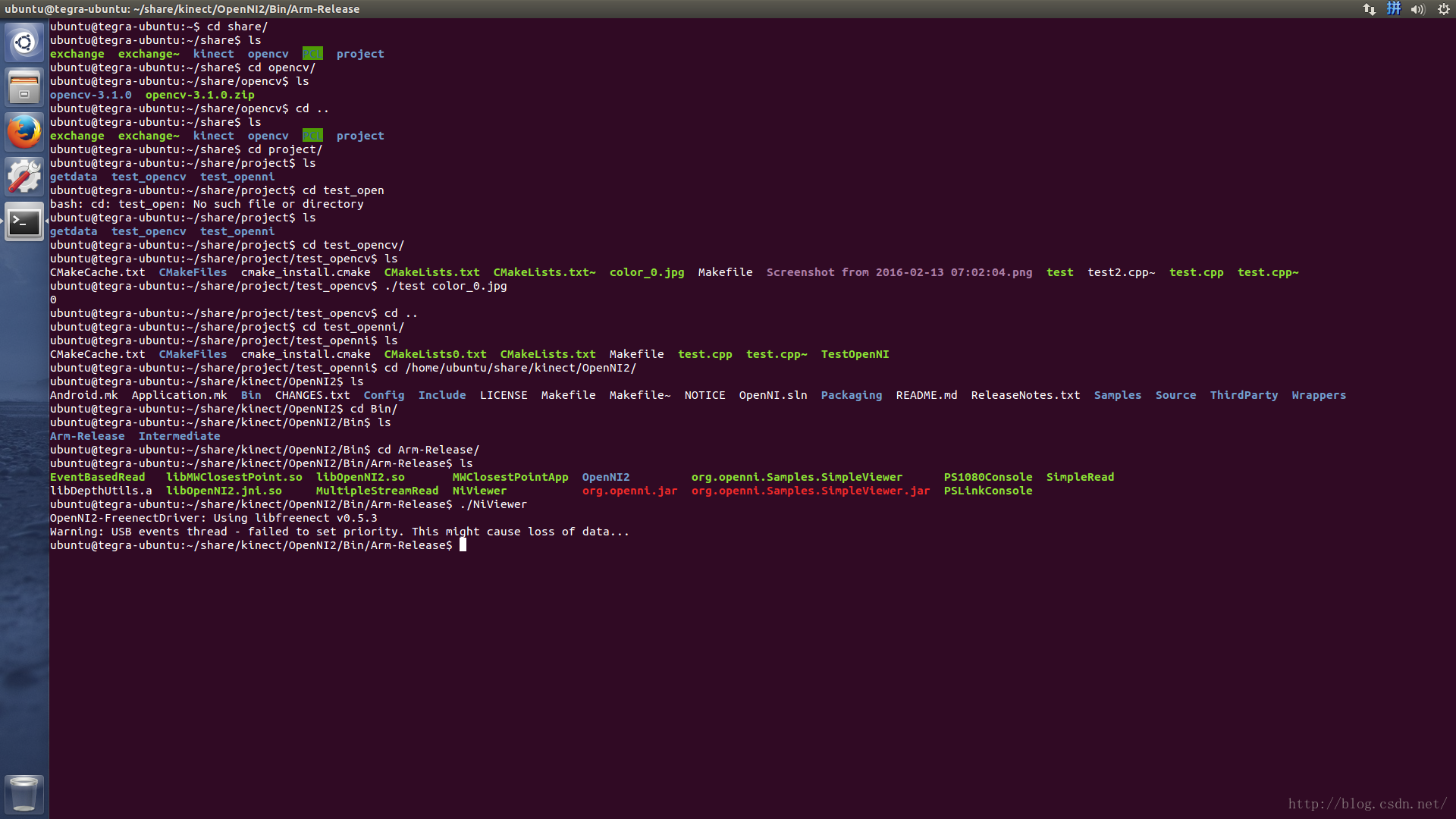
运行结果:
三、PCL安装
参考:
http://larrylisky.com/2014/03/03/installing-pcl-on-ubuntu/
安装依赖环境
sudo apt-get install g++
sudo apt-get install cmake cmake-gui
sudo apt-get install doxygen
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1 libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk5.8-qt4 libvtk5.8 libvtk5-dev
sudo apt-get install libqhull*
sudo apt-get install libusb-dev
sudo apt-get install libgtest-dev
sudo apt-get install git-core freeglut3-dev pkg-config
sudo apt-get install build-essential libxmu-dev libxi-dev
sudo apt-get install libusb-1.0-0-dev graphviz mono-complete
sudo apt-get install qt-sdk openjdk-7-jdk openjdk-7-jre
sudo apt-get install phonon-backend-gstreamer
sudo apt-get install phonon-backend-vlc
从github上下载pcl最新版本并编译
$git clone https://github.com/PointCloudLibrary/pcl.git pcl-trunk ln -s pcl-trunk pcl(我是直接下载了压缩包,解压的,不然太慢了)
$mkdir release
$cd release
$cmake -DCMAKE_BUILD_TYPE=None -DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON ..
$make
$sudo make install
至此完成安装,但是是VTK有问题的,留着下次解决---->这么解决:
大家如何cmake时,发现有类似The imported target "vtk***" reference the file "/usr/bin/vtk**"的错误,需要安装如下两个东西:
sudo apt-get install libvtk-java
sudo apt-get install python-vtk然后再重新编译,时间非常久
cmake -DCMAKE_BUILD_TYPE=None -DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON ..
make
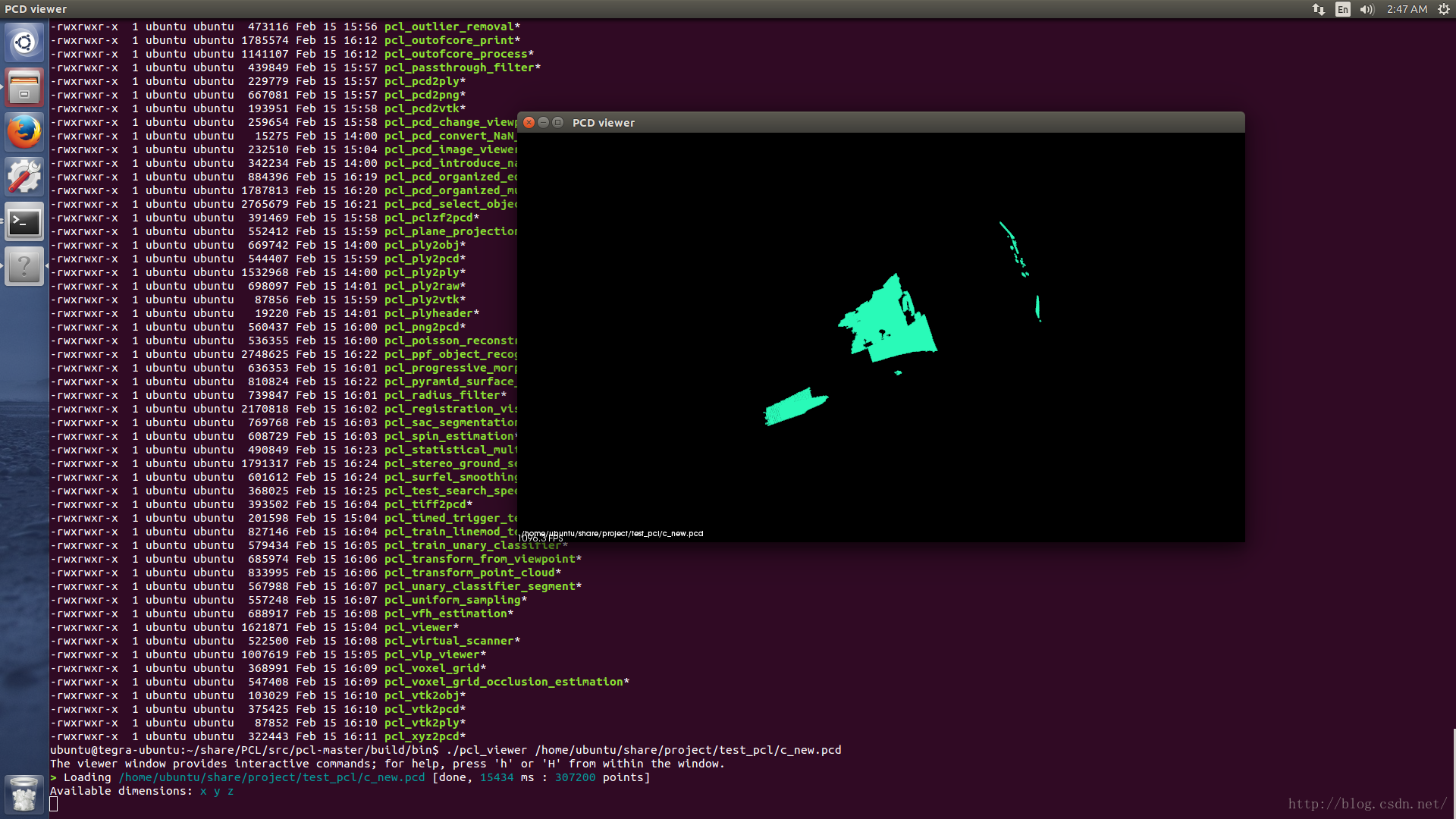
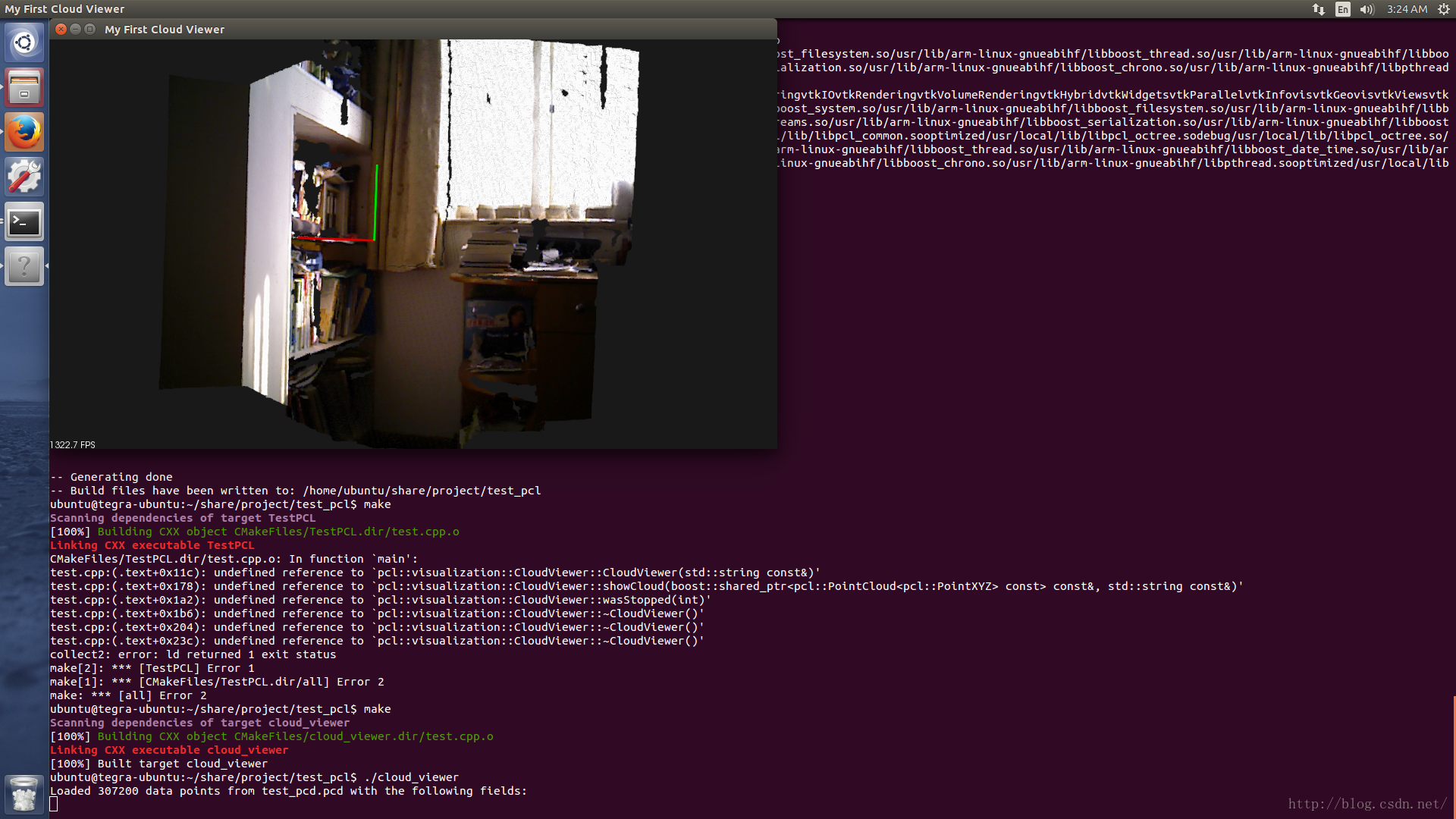
make install编译完成后,执行他的pcd_viewer,结果如下:
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
using namespace std;
using namespace pcl;
int main ()
{
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZRGB>);
if(pcl::io::loadPCDFile<pcl::PointXYZRGB>("color_5.pcd",*cloud)==-1)//*打开点云文件
{
PCL_ERROR("Couldn't read file test_pcd.pcd\n");
return(-1);
}
std::cout<<"Loaded "<<cloud->width*cloud->height<<" data points from test_pcd.pcd with the following fields: "<<std::endl;
pcl::visualization::CloudViewer viewer("My First Cloud Viewer");
viewer.showCloud(cloud);
while(!viewer.wasStopped())
{
}
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(cloud_viewer)
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (cloud_viewer test.cpp)
target_link_libraries (cloud_viewer ${PCL_LIBRARIES})
四、最后再给出三个库同时使用的情形:
CMakeLists.txt
# This CmakeLists include both OpenNI and OpenCV Libraries
cmake_minimum_required(VERSION 2.8)
project( TestOpenNI )
# OpenCV
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
MESSAGE(STATUS "The Opencv's include directory is:" ${OpenCV_INCLUDE_DIRS})
#OpenNI
FIND_PATH(OpenNI2_INCLUDE_DIRS OpenNI.h HINTS $ENV{OPENNI2_INCLUDE} PATH_SUFFIXES openni2)
FIND_LIBRARY(OpenNI2_LIBRARY NAMES OpenNI2 HINTS $ENV{OPENNI2_LIB} $ENV{OPENNI2_REDIST})
include_directories( ${OpenNI2_INCLUDE_DIRS} )
IF (OpenNI2_INCLUDE_DIRS AND OpenNI2_LIBRARY)
SET(OpenNI2_FOUND TRUE)
ENDIF (OpenNI2_INCLUDE_DIRS AND OpenNI2_LIBRARY)
IF (OpenNI2_FOUND)
# show which OpenNI2 was found only if not quiet
SET(OpenNI2_LIBRARIES ${OpenNI2_LIBRARY})
MESSAGE(STATUS "Found OpenNI2: ${OpenNI2_LIBRARIES}")
ELSE (OpenNI2_FOUND)
# fatal error if OpenNI2 is required but not found
IF (OpenNI2_FIND_REQUIRED)
MESSAGE(FATAL_ERROR "Could not find OpenNI2. Environment variables OPENNI2_INCLUDE (directory containing OpenNI.h) and OPENNI2_LIB (directory containing OpenNI2 library) could bet set.")
ENDIF (OpenNI2_FIND_REQUIRED)
ENDIF (OpenNI2_FOUND)
#set (CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
#set (OPENNI_H /usr/include/openni2/OpenNI.h)
# ---------------------------------------------------------
#PCL
find_package(PCL 1.8 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(TestOpenNI test.cpp)
target_link_libraries(TestOpenNI ${OpenNI2_LIBRARIES} ${OpenCV_LIBS} ${PCL_COMMON_LIBRARIES} ${PCL_IO_LIBRARIES})
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
// 标准库头文件
#include <iostream>
#include <string>
#include <vector>
// OpenCV头文件
#include <opencv2/photo.hpp>
#include <opencv2/highgui.hpp>
// OpenNI头文件
#include <OpenNI.h>
typedef unsigned char uint8_t;
// namespace
using namespace std;
using namespace openni;
using namespace cv;
using namespace pcl;
void CheckOpenNIError( Status result, string status )
{
if( result != STATUS_OK )
cerr << status << " Error: " << OpenNI::getExtendedError() << endl;
}
int main( int argc, char **argv )
{
Status result = STATUS_OK;
int i,j;
float x=0.0,y=0.0,z=0.0,xx=0.0;
//IplImage *test,*test2;
IplImage *test2;
char filename[20] = {0};
//point cloud
PointCloud<PointXYZ> cloud;
PointCloud<PointXYZRGB> color_cloud;
//opencv image
Mat cvBGRImg;
Mat cvDepthImg;
//OpenNI2 image
VideoFrameRef oniDepthImg;
VideoFrameRef oniColorImg;
namedWindow("depth");
namedWindow("image");
char key=0;
// 初始化OpenNI
result = OpenNI::initialize();
CheckOpenNIError( result, "initialize context" );
// open device
Device device;
result = device.open( openni::ANY_DEVICE );
CheckOpenNIError( result, "open device" );
// create depth stream
VideoStream oniDepthStream;
result = oniDepthStream.create( device, openni::SENSOR_DEPTH );
CheckOpenNIError( result, "create depth stream" );
// set depth video mode
VideoMode modeDepth;
modeDepth.setResolution( 640, 480 );
modeDepth.setFps( 30 );
modeDepth.setPixelFormat( PIXEL_FORMAT_DEPTH_1_MM );
oniDepthStream.setVideoMode(modeDepth);
// start depth stream
result = oniDepthStream.start();
CheckOpenNIError( result, "start depth stream" );
// create color stream
VideoStream oniColorStream;
result = oniColorStream.create( device, openni::SENSOR_COLOR );
CheckOpenNIError( result, "create color stream" );
// set color video mode
VideoMode modeColor;
modeColor.setResolution( 640, 480 );
modeColor.setFps( 30 );
modeColor.setPixelFormat( PIXEL_FORMAT_RGB888 );
oniColorStream.setVideoMode( modeColor);
// start color stream
result = oniColorStream.start();
CheckOpenNIError( result, "start color stream" );
int count = 0;
while(true)
{
// read frame
if( oniColorStream.readFrame( &oniColorImg ) == STATUS_OK )
{
// convert data into OpenCV type
Mat cvRGBImg( oniColorImg.getHeight(), oniColorImg.getWidth(), CV_8UC3, (void*)oniColorImg.getData() );
cvtColor( cvRGBImg, cvBGRImg, CV_RGB2BGR );
imshow( "image", cvBGRImg );
}
if( oniDepthStream.readFrame( &oniDepthImg ) == STATUS_OK )
{
Mat cvRawImg16U( oniDepthImg.getHeight(), oniDepthImg.getWidth(), CV_16UC1, (void*)oniDepthImg.getData() );
cvRawImg16U.convertTo( cvDepthImg, CV_8U, 255.0/(oniDepthStream.getMaxPixelValue()));
imshow( "depth", cvDepthImg );
}
char input = waitKey(1);
// quit
if( input == 'q' )
break;
// capture depth and color data
if( input == 'c' )
{
//get data
DepthPixel *pDepth = (DepthPixel*)oniDepthImg.getData();
//create point cloud
cloud.width = oniDepthImg.getWidth();
cloud.height = oniDepthImg.getHeight();
cloud.is_dense = false;
cloud.points.resize(cloud.width * cloud.height);
color_cloud.width = oniDepthImg.getWidth();
color_cloud.height = oniDepthImg.getHeight();
color_cloud.is_dense = false;
color_cloud.points.resize(color_cloud.width * color_cloud.height);
//test = cvCreateImage(cvSize(cloud.width,cloud.height),IPL_DEPTH_8U,3);
IplImage temp11 = (IplImage)cvBGRImg;
//test2 = &IplImage(cvBGRImg);
test2 = &temp11;
for(i=0;i<oniDepthImg.getHeight();i++)
{
for(j=0;j<oniDepthImg.getWidth();j++)
{
float k = i;
float m = j;
xx = pDepth[i*oniDepthImg.getWidth()+j];
CoordinateConverter::convertDepthToWorld (oniDepthStream,m,k,xx,&x,&y,&z);
cloud[i*cloud.width+j].x = x/1000;
cloud[i*cloud.width+j].y = y/1000;
cloud[i*cloud.width+j].z = z/1000;
color_cloud[i*cloud.width+j].x = x/1000;
color_cloud[i*cloud.width+j].y = y/1000;
color_cloud[i*cloud.width+j].z = z/1000;
color_cloud[i*cloud.width+j].b = (uint8_t)test2->imageData[i*test2->widthStep+j*3+0];
color_cloud[i*cloud.width+j].g = (uint8_t)test2->imageData[i*test2->widthStep+j*3+1];
color_cloud[i*cloud.width+j].r = (uint8_t)test2->imageData[i*test2->widthStep+j*3+2];
/* test->imageData[i*test->widthStep+j*3+0] = test2->imageData[i*test2->widthStep+j*3+0];
test->imageData[i*test->widthStep+j*3+1] = test2->imageData[i*test2->widthStep+j*3+1];
test->imageData[i*test->widthStep+j*3+2] = test2->imageData[i*test2->widthStep+j*3+2];*/
}
}
//cvSaveImage("test.jpg",test);
//pcl::io::savePLYFileBinary("test_plyc.ply",cloud);
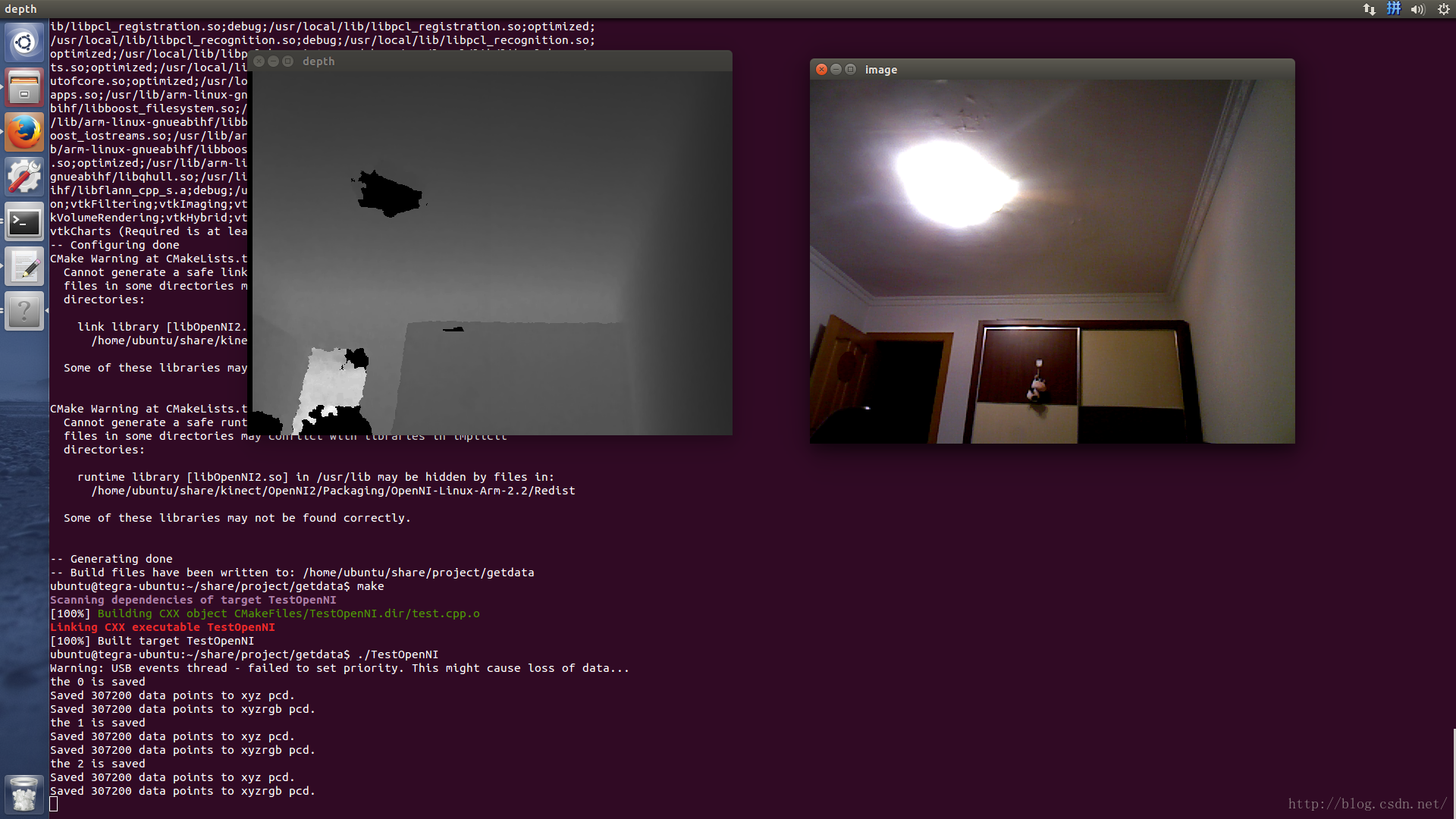
cout<<"the "<<count<<" is saved"<<endl;
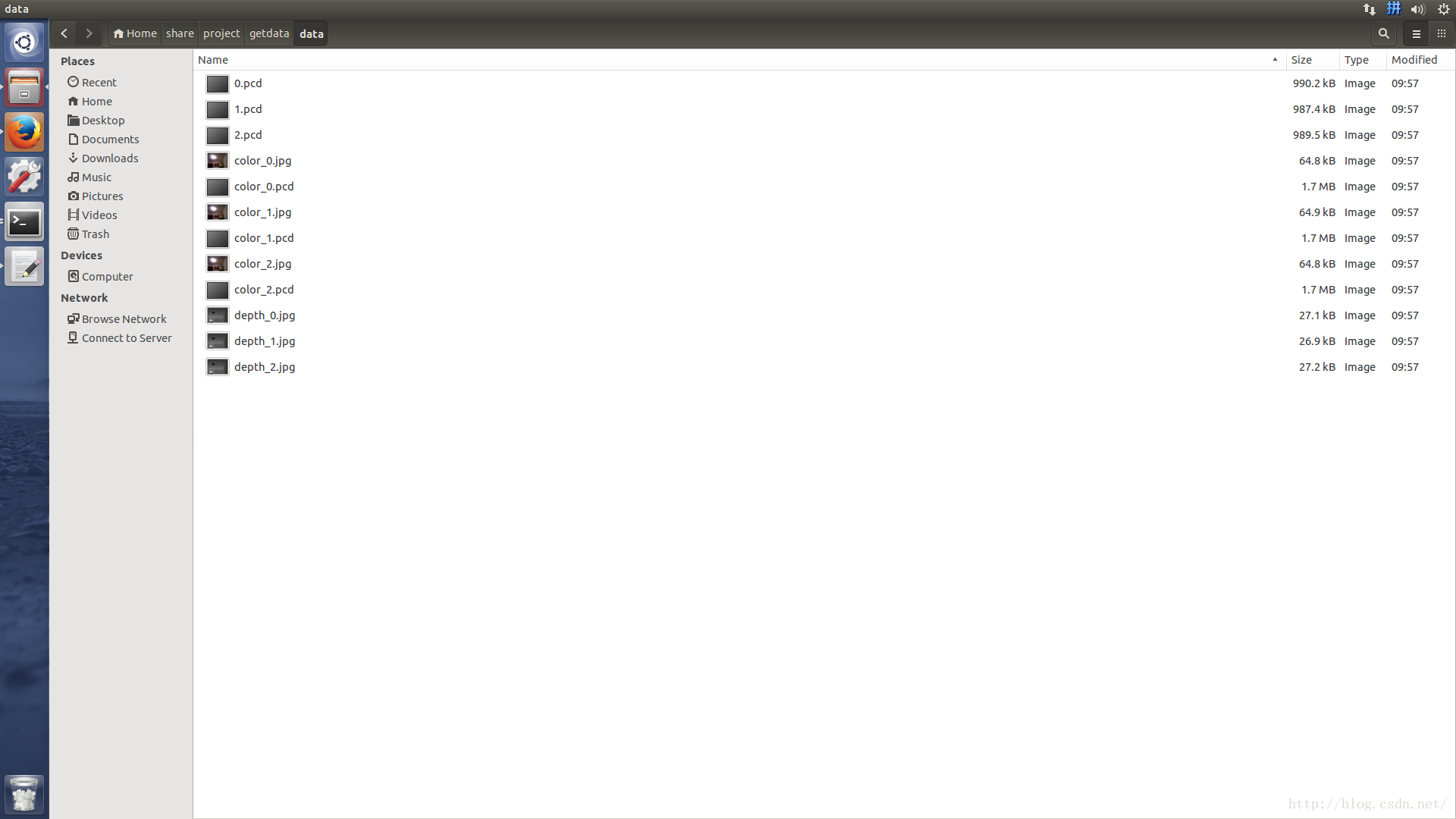
sprintf(filename,"./data/%d.pcd",count);
pcl::io::savePCDFileBinaryCompressed(filename,cloud);
cerr<<"Saved "<<cloud.points.size()<<" data points to xyz pcd."<<endl;
sprintf(filename,"./data/color_%d.pcd",count);
pcl::io::savePCDFileBinaryCompressed(filename,color_cloud);
cerr<<"Saved "<<color_cloud.points.size()<<" data points to xyzrgb pcd."<<endl;
sprintf(filename,"./data/color_%d.jpg",count);
imwrite(filename,cvBGRImg);
sprintf(filename,"./data/depth_%d.jpg",count++);
imwrite(filename,cvDepthImg);
/*for(size_t i=0;i<cloud.points.size();++i)
cerr<<" "<<cloud.points[i].x<<" "<<cloud.points[i].y<<" "<<cloud.points[i].z<<endl;*/
}
}
}
运行结果:
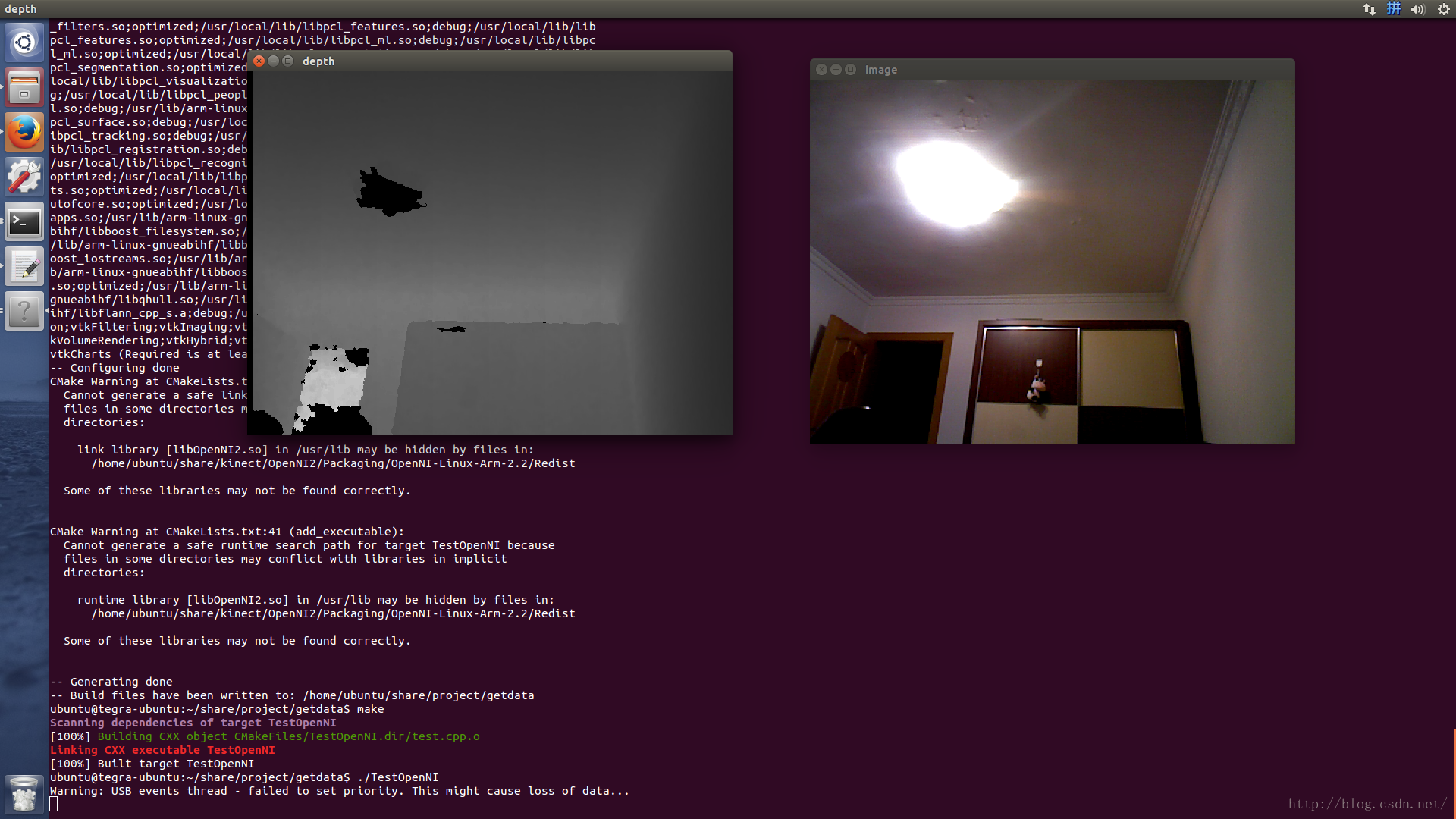
键盘输入c抓取数据,按q退出

















 1295
1295

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









