要将 YOLOv3 的权重文件转换为 Keras 可以使用的 .h5 文件,需要进行以下步骤:
1. 下载并安装 `keras` 和 `tensorflow` 库:
```
pip install keras tensorflow
```
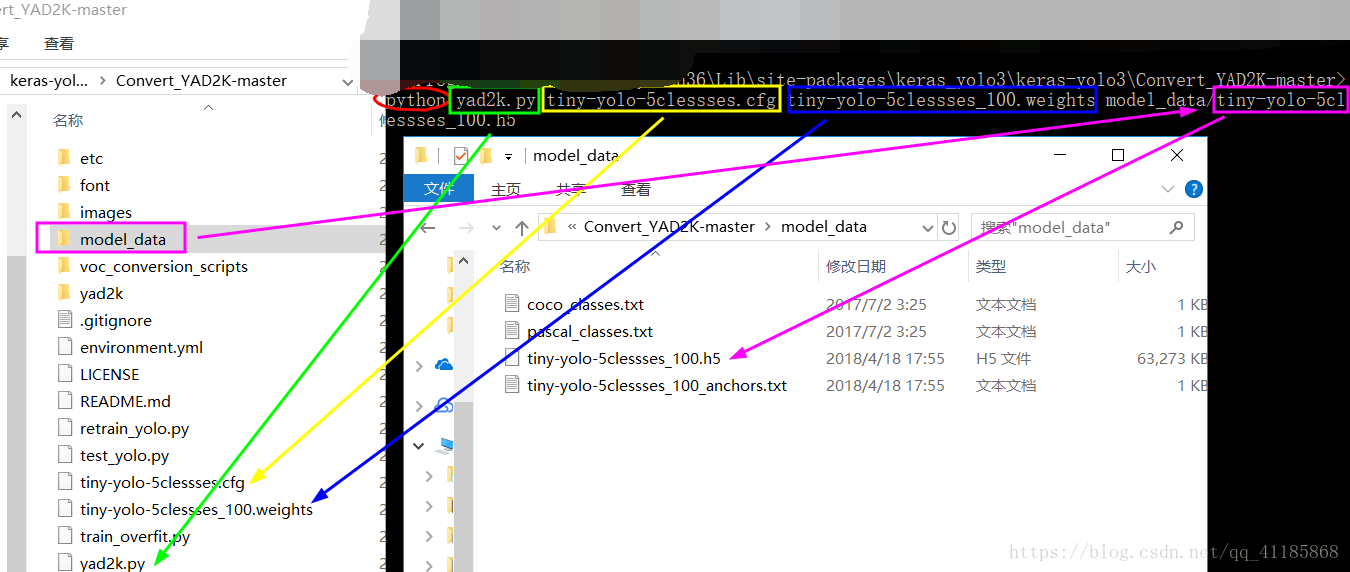
2. 下载 YOLOv3 的权重文件 `yolov3.weights` 和配置文件 `yolov3.cfg`。
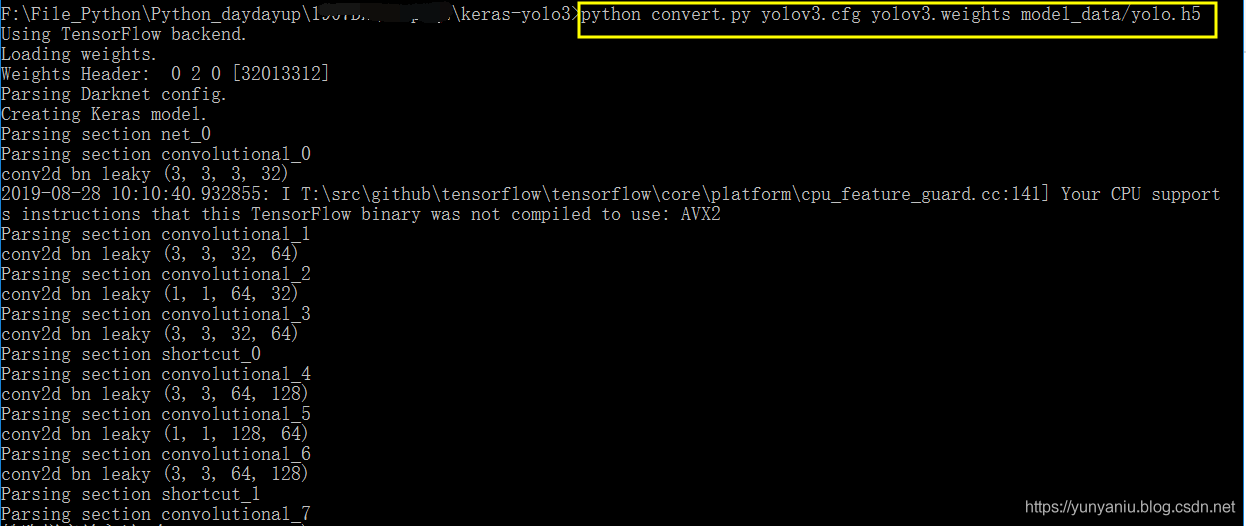
3. 使用 `yolo_weights_convert.py` 脚本将权重文件转换为 Keras 模型:
```
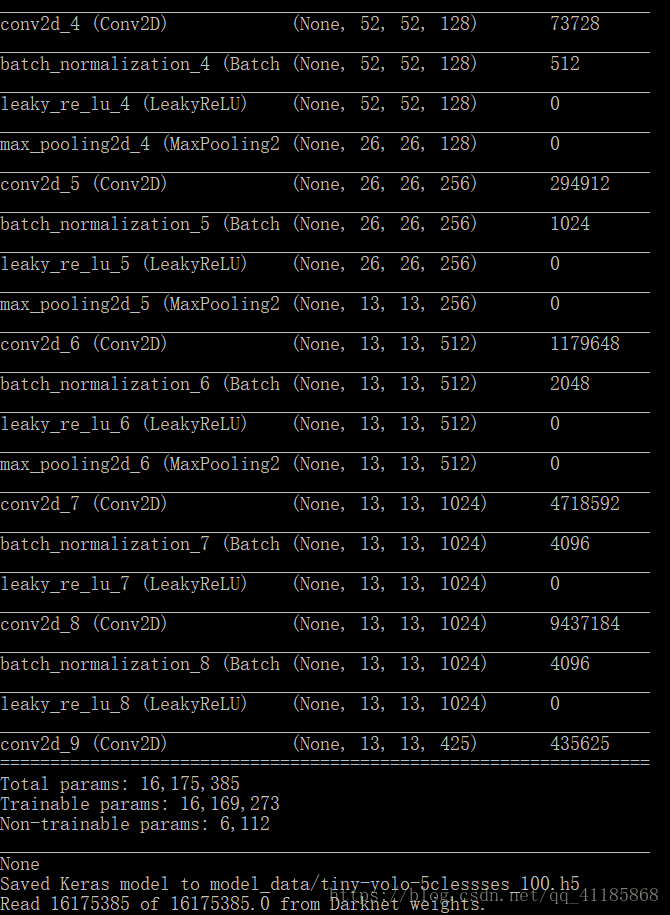
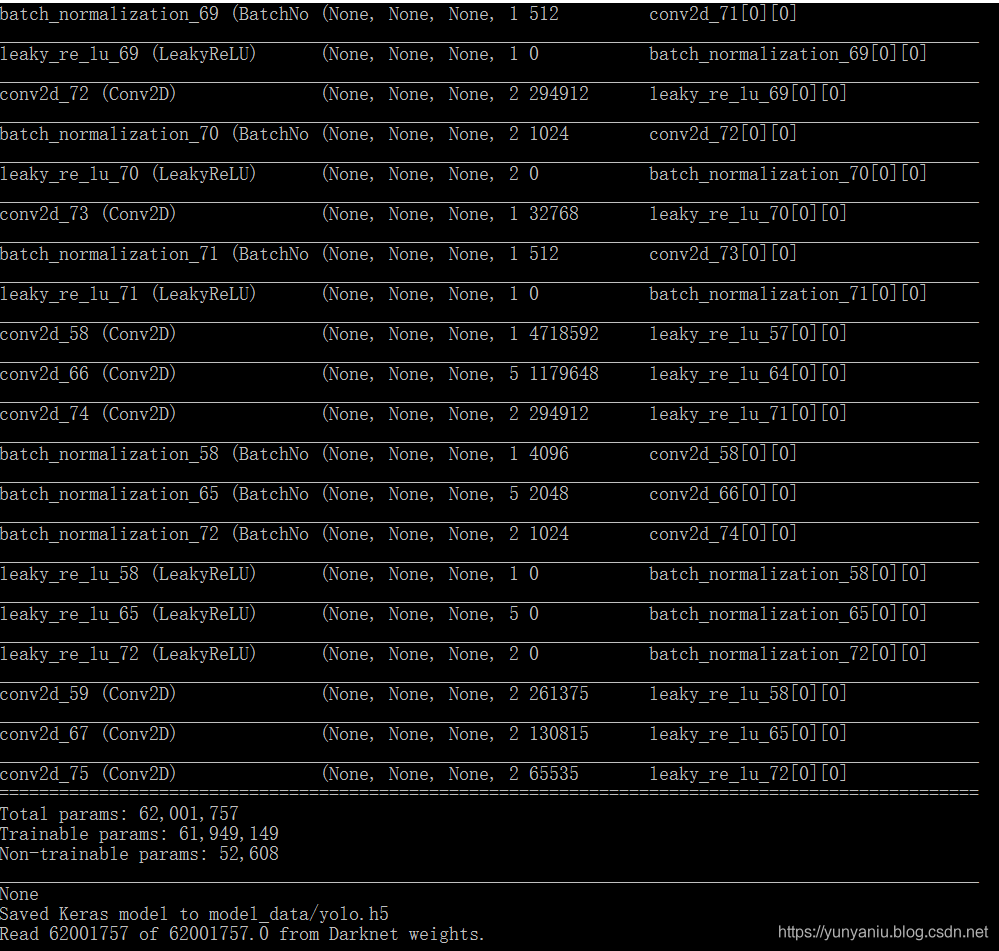
python yolo_weights_convert.py yolov3.cfg yolov3.weights model_data/yolo.h5
```
其中,`yolov3.cfg` 是 YOLOv3 的配置文件路径,`yolov3.weights` 是权重文件路径,`model_data/yolo.h5` 是转换后的 Keras 模型保存路径。
以下是 `yolo_weights_convert.py` 的代码:
```python
import argparse
import numpy as np
import struct
import os
from keras.layers import Conv2D, Input, ZeroPadding2D, BatchNormalization, LeakyReLU, UpSampling2D
from keras.layers.merge import add, concatenate
from keras.models import Model
from keras.engine.topology import Layer
from keras import backend as K
class YoloLayer(Layer):
def __init__(self, anchors, max_grid, batch_size, warmup_batches, ignore_thresh, grid_scale,
obj_scale, noobj_scale, xywh_scale, class_scale, **kwargs):
self.ignore_thresh = ignore_thresh
self.warmup_batches = warmup_batches
self.anchors = anchors
self.grid_scale = grid_scale
self.obj_scale = obj_scale
self.noobj_scale = noobj_scale
self.xywh_scale = xywh_scale
self.class_scale = class_scale
self.batch_size = batch_size
self.true_boxes = K.placeholder(shape=(self.batch_size, 1, 1, 1, 50, 4))
super(YoloLayer, self).__init__(**kwargs)
def build(self, input_shape):
super(YoloLayer, self).build(input_shape)
def get_grid_size(self, net_h, net_w):
return net_h // 32, net_w // 32
def call(self, x):
input_image, y_pred, y_true = x
self.net_h, self.net_w = input_image.shape.as_list()[1:3]
self.grid_h, self.grid_w = self.get_grid_size(self.net_h, self.net_w)
# adjust the shape of the y_predict [batch, grid_h, grid_w, 3, 4+1+80]
y_pred = K.reshape(y_pred, (self.batch_size, self.grid_h, self.grid_w, 3, 4 + 1 + 80))
# convert the coordinates to absolute coordinates
box_xy = K.sigmoid(y_pred[..., :2])
box_wh = K.exp(y_pred[..., 2:4])
box_confidence = K.sigmoid(y_pred[..., 4:5])
box_class_probs = K.softmax(y_pred[..., 5:])
# adjust the shape of the y_true [batch, 50, 4+1]
object_mask = y_true[..., 4:5]
true_class_probs = y_true[..., 5:]
# true_boxes[..., 0:2] = center, true_boxes[..., 2:4] = wh
true_boxes = self.true_boxes[..., 0:4] # shape=[batch, 50, 4]
true_xy = true_boxes[..., 0:2] * [self.grid_w, self.grid_h] # shape=[batch, 50, 2]
true_wh = true_boxes[..., 2:4] * [self.net_w, self.net_h] # shape=[batch, 50, 2]
true_wh_half = true_wh / 2.
true_mins = true_xy - true_wh_half
true_maxes = true_xy + true_wh_half
# calculate the Intersection Over Union (IOU)
pred_xy = K.expand_dims(box_xy, 4)
pred_wh = K.expand_dims(box_wh, 4)
pred_wh_half = pred_wh / 2.
pred_mins = pred_xy - pred_wh_half
pred_maxes = pred_xy + pred_wh_half
intersect_mins = K.maximum(pred_mins, true_mins)
intersect_maxes = K.minimum(pred_maxes, true_maxes)
intersect_wh = K.maximum(intersect_maxes - intersect_mins, 0.)
intersect_areas = intersect_wh[..., 0] * intersect_wh[..., 1]
pred_areas = pred_wh[..., 0] * pred_wh[..., 1]
true_areas = true_wh[..., 0] * true_wh[..., 1]
union_areas = pred_areas + true_areas - intersect_areas
iou_scores = intersect_areas / union_areas
# calculate the best IOU, set the object mask and update the class probabilities
best_ious = K.max(iou_scores, axis=4)
object_mask_bool = K.cast(best_ious >= self.ignore_thresh, K.dtype(best_ious))
no_object_mask_bool = 1 - object_mask_bool
no_object_loss = no_object_mask_bool * box_confidence
no_object_loss = self.noobj_scale * K.mean(no_object_loss)
true_box_class = true_class_probs * object_mask
true_box_confidence = object_mask
true_box_xy = true_boxes[..., 0:2] * [self.grid_w, self.grid_h] - pred_mins
true_box_wh = K.log(true_boxes[..., 2:4] * [self.net_w, self.net_h] / pred_wh)
true_box_wh = K.switch(object_mask, true_box_wh, K.zeros_like(true_box_wh)) # avoid log(0)=-inf
true_box_xy = K.switch(object_mask, true_box_xy, K.zeros_like(true_box_xy)) # avoid log(0)=-inf
box_loss_scale = 2 - true_boxes[..., 2:3] * true_boxes[..., 3:4]
xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(true_box_xy, box_xy)
wh_loss = object_mask * box_loss_scale * 0.5 * K.square(true_box_wh - box_wh)
confidence_loss = true_box_confidence * K.binary_crossentropy(box_confidence, true_box_confidence) \
+ (1 - true_box_confidence) * K.binary_crossentropy(box_confidence, true_box_confidence) \
* no_object_mask_bool
class_loss = object_mask * K.binary_crossentropy(true_box_class, box_class_probs)
xy_loss = K.mean(K.sum(xy_loss, axis=[1, 2, 3, 4]))
wh_loss = K.mean(K.sum(wh_loss, axis=[1, 2, 3, 4]))
confidence_loss = K.mean(K.sum(confidence_loss, axis=[1, 2, 3, 4]))
class_loss = K.mean(K.sum(class_loss, axis=[1, 2, 3, 4]))
loss = self.grid_scale * (xy_loss + wh_loss) + confidence_loss * self.obj_scale + no_object_loss \
+ class_loss * self.class_scale
# warm up training
batch_no = K.cast(self.batch_size / 2, dtype=K.dtype(object_mask))
warmup_steps = self.warmup_batches
warmup_lr = batch_no / warmup_steps
batch_no = K.cast(K.minimum(warmup_steps, batch_no), dtype=K.dtype(object_mask))
lr = self.batch_size / (batch_no * warmup_steps)
warmup_decay = (1 - batch_no / warmup_steps) ** 4
lr = lr * (1 - warmup_decay) + warmup_lr * warmup_decay
self.add_loss(loss)
self.add_metric(loss, name='loss', aggregation='mean')
self.add_metric(xy_loss, name='xy_loss', aggregation='mean')
self.add_metric(wh_loss, name='wh_loss', aggregation='mean')
self.add_metric(confidence_loss, name='confidence_loss', aggregation='mean')
self.add_metric(class_loss, name='class_loss', aggregation='mean')
self.add_metric(lr, name='lr', aggregation='mean')
return y_pred
def compute_output_shape(self, input_shape):
return input_shape[1]
def get_config(self):
config = {
'ignore_thresh': self.ignore_thresh,
'warmup_batches': self.warmup_batches,
'anchors': self.anchors,
'grid_scale': self.grid_scale,
'obj_scale': self.obj_scale,
'noobj_scale': self.noobj_scale,
'xywh_scale': self.xywh_scale,
'class_scale': self.class_scale
}
base_config = super(YoloLayer, self).get_config()
return dict(list(base_config.items()) + list(config.items()))
def _conv_block(inp, convs, skip=True):
x = inp
count = 0
for conv in convs:
if count == (len(convs) - 2) and skip:
skip_connection = x
count += 1
if conv['stride'] > 1:
x = ZeroPadding2D(((1, 0), (1, 0)))(x) # unlike tensorflow darknet prefer left and top paddings
x = Conv2D(conv['filter'],
conv['kernel'],
strides=conv['stride'],
padding='valid' if conv['stride'] > 1 else 'same', # unlike tensorflow darknet prefer left and top paddings
name='conv_' + str(conv['layer_idx']),
use_bias=False if conv['bnorm'] else True)(x)
if conv['bnorm']:
x = BatchNormalization(epsilon=0.001, name='bnorm_' + str(conv['layer_idx']))(x)
if conv['leaky']:
x = LeakyReLU(alpha=0.1, name='leaky_' + str(conv['layer_idx']))(x)
return add([skip_connection, x]) if skip else x
def make_yolov3_model():
input_image = Input(shape=(None, None, 3))
true_boxes = Input(shape=(1, 1, 1, 50, 4))
# Layer 0 => 4
x = _conv_block(input_image, [{'filter': 32, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 64, 'kernel': 3, 'stride': 2, 'bnorm': True, 'leaky': True},
{'filter': 32, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 64, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 5 => 8
x = _conv_block(x, [{'filter': 128, 'kernel': 3, 'stride': 2, 'bnorm': True, 'leaky': True},
{'filter': 64, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 128, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 9 => 11
x = _conv_block(x, [{'filter': 64, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 128, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 12 => 15
x = _conv_block(x, [{'filter': 256, 'kernel': 3, 'stride': 2, 'bnorm': True, 'leaky': True},
{'filter': 128, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 256, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 16 => 36
for i in range(7):
x = _conv_block(x, [{'filter': 128, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 256, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
skip_36 = x
# Layer 37 => 40
x = _conv_block(x, [{'filter': 512, 'kernel': 3, 'stride': 2, 'bnorm': True, 'leaky': True},
{'filter': 256, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 41 => 61
for i in range(7):
x = _conv_block(x, [{'filter': 256, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
skip_61 = x
# Layer 62 => 65
x = _conv_block(x, [{'filter': 1024, 'kernel': 3, 'stride': 2, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 1024, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 1024, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 66 => 74
for i in range(3):
x = _conv_block(x, [{'filter': 512, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 1024, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 75 => 79
x = _conv_block(x, [{'filter': 512, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 1024, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 1024, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True}])
# Layer 80 => 82
yolo_82 = _conv_block(x, [{'filter': 1024, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 255, 'kernel': 1, 'stride': 1, 'bnorm': False, 'leaky': False}], skip=False)
# Layer 83 => 86
x = _conv_block(x, [{'filter': 256, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True}],
skip=False)
x = UpSampling2D(2)(x)
x = concatenate([x, skip_61])
# Layer 87 => 91
x = _conv_block(x, [{'filter': 256, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 256, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 512, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 256, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True}], skip=False)
# Layer 92 => 94
yolo_94 = _conv_block(x, [{'filter': 512, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 255, 'kernel': 1, 'stride': 1, 'bnorm': False, 'leaky': False}],
skip=False)
# Layer 95 => 98
x = _conv_block(x, [{'filter': 128, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True}],
skip=False)
x = UpSampling2D(2)(x)
x = concatenate([x, skip_36])
# Layer 99 => 106
yolo_106 = _conv_block(x, [{'filter': 128, 'kernel': 1, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter': 256, 'kernel': 3, 'stride': 1, 'bnorm': True, 'leaky': True},
{'filter
























 686
686











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











