







在Cocos2d-x 3.x版本添加了对3D物体的支持后,3D物体的碰撞检测方法也随之更新,其中一种最简单的碰撞检测方法就是AABB碰撞检测。
1. AABB包围盒
在游戏中,为了简化物体之间的碰撞检测运算,通常会对物体创建一个规则的几何外形将其包围。
其中,AABB(axis-aligned bounding box)包围盒被称为轴对其包围盒。
二维场景中的AABB包围盒具备特点:(注:由于Cocos2d-x是基于Opengl ES的,所以下图中的所有坐标系均采用右手直角坐标系)
(1) 表现形式为四边形,即用四边形包围物体。
(2) 四边形的每一条边,都会与坐标系的轴垂直。
如图 1-1 所示:
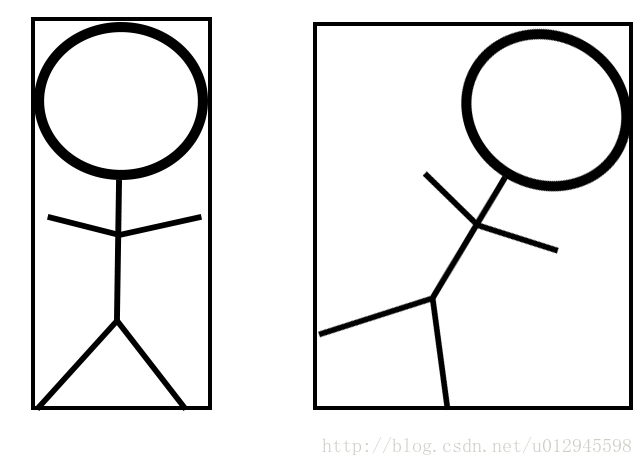
图1-1
三维场景中的AABB包围盒特点:
(1) 表现形式为六面体。
(2) 六面体中的每条边都平行于一个坐标平面。
如图 1-2 所示:
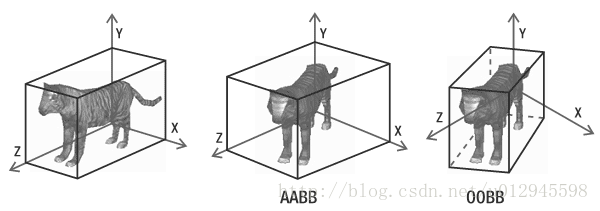
图 1-2(图片来源百度)
在图1-2中,为了更明显的展示AABB包围盒的特点,在最右侧展示了一个OBB(Oriented Bounding Box)包围盒,也称作有向包围盒。
可以看出,AABB包围盒与OBB包围盒的最直接的区别就是,AABB包围盒是不可以旋转的,而OBB包围盒是可以旋转的,也就是有向的。
2. 二维场景中的AABB碰撞检测原理
首先来看一张二维场景中的物体碰撞图:

图 2-1
在图 2-1中,分别做物体A与物体B在X,Y轴方向的投影,物体A的Y轴方向最大点坐标为Y1,最小点坐标Y2,X轴方向最小点坐标X1,最大点坐标X2,物体B同理。
图中红色区域为物体A与物体B投影的重叠部分。
可以看出,AABB碰撞检测具有如下规则:
物体A与物体B分别沿两个坐标轴做投影,只有在两个坐标轴都发生重叠的情况下,两个物体才意味着发生了碰撞。
所以,在程序中做二维游戏的AABB碰撞检测时,只需验证物体A与物体B是否满足如下条件:
(1)物体A的Y轴方向最小值大于物体B的Y轴方向最大值;
(2)物体A的X轴方向最小值大于物体B的X轴方向最大值;
(3)物体B的Y轴方向最小值大于物体A的Y轴方向最大值;
(4)物体B的X轴方向最小值大于物体A的X轴方向最大值;
若满足上述条件,则证明物体A与物体B并未发生重合,反之,则证明物体A与物体B重合。
3. 三维场景中的AABB碰撞检测原理
首先,再来看一下图2-1中的二维物体A和物体B的包围盒,可以发现实际上判断物体A与物体B是否发生重合只需要知道两个信息:
(1) 物体A的最小点的信息,即图2-1中A的左下角点;以及物体A的最大点的信息,即图2-1中A的右上角点。
(2) 物体B的最小点的信息,物体B的最大点的信息。
也就是说在二维场景的碰撞检测中,每个物体的顶点坐标信息都可以由两个坐标来确定,即两个坐标就可以标识一个物体了,所以两个物体的碰撞检测只需要获得到四个点坐标就可以了。
之前在图1-2中已经看到,三维场景中物体的AABB包围盒是一个六面体,其坐标系对于二维坐标系来讲只是多了一个Z轴,所以实际上在三维场景中物体的AABB碰撞检测依然可以采用四个点信息的判定来实现。即从物体A的八个顶点与物体B的八个顶点分别选出两个最大与最小的顶点进行对比。三维物体的AABB包围盒的八个顶点依旧可以用两个顶点来标识,如图 3-1 所示:
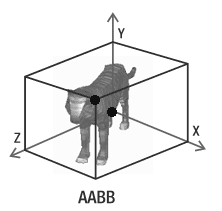
图3-1
只要确定了图中黑色点部分的坐标,就可以确定八个顶点的全部信息了。
在Cocos2d-x 3.x版本中,为开发者提供了AABB类,用于保存包围盒的最大顶点与最小顶点的信息,并且为每个Sprite3D对象提供了获取AABB包围盒的接口,在AABB类同时提供了判断相应的碰撞检测的方法。有一点需要注意的是,CCAABB类中一开始保存的最大顶点与最小顶点的信息实际上是物体坐标系中的信息,而实际上在碰撞检测时需要将其转换成世界坐标系中的点,这一过程在Sprite3D中的getAABB()方法中实现,可通过CCAABB中的
transform()方法来完成。
下面对AABB的源码进行分析:
CCAABB.h 文件
/****************************************************************************
Copyright (c) 2014 Chukong Technologies Inc.
http://www.cocos2d-x.org
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
****************************************************************************/
#ifndef __CC_AABB_H__
#define __CC_AABB_H__
#include "base/ccMacros.h"
#include "math/CCMath.h"
NS_CC_BEGIN
class CC_DLL AABB
{
public:
/**
* Constructor.
*/
AABB();
/**
* Constructor.
*/
AABB(const Vec3& min, const Vec3& max);
/**
* Constructor.
*/
AABB(const AABB& box);
/**
* Gets the center point of the bounding box.
*/
Vec3 getCenter();
/* Near face, specified counter-clockwise looking towards the origin from the positive z-axis.
* verts[0] : left top front
* verts[1] : left bottom front
* verts[2] : right bottom front
* verts[3] : right top front
*
* Far face, specified counter-clockwise looking towards the origin from the negative z-axis.
* verts[4] : right top back
* verts[5] : right bottom back
* verts[6] : left bottom back
* verts[7] : left top back
*/
void getCorners(Vec3 *dst) const;
/**
* Tests whether this bounding box intersects the specified bounding object.
*/
bool intersects(const AABB& aabb) const;
/**
* check whether the point is in.
*/
bool containPoint(const Vec3& point) const;
/**
* Sets this bounding box to the smallest bounding box
* that contains both this bounding object and the specified bounding box.
*/
void merge(const AABB& box);
/**
* Sets this bounding box to the specified values.
*/
void set(const Vec3& min, const Vec3& max);
/**
* reset min and max value.
*/
void reset();
bool isEmpty() const;
/**
* update the _min and _max from the given point.
*/
void updateMinMax(const Vec3* point, ssize_t num);
/**
* Transforms the bounding box by the given transformation matrix.
*/
void transform(const Mat4& mat);
public:
Vec3 _min;
Vec3 _max;
};
NS_CC_END
#endif
/****************************************************************************
Copyright (c) 2014 Chukong Technologies Inc.
http://www.cocos2d-x.org
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
****************************************************************************/
#include "3d/CCAABB.h"
NS_CC_BEGIN
AABB::AABB()
{
reset();
}
AABB::AABB(const Vec3& min, const Vec3& max)
{
set(min, max);
}
AABB::AABB(const AABB& box)
{
set(box._min,box._max);
}
//获取包围盒中心点坐标
Vec3 AABB::getCenter()
{
Vec3 center;
center.x = 0.5f*(_min.x+_max.x);
center.y = 0.5f*(_min.y+_max.y);
center.z = 0.5f*(_min.z+_max.z);
return center;
}
//获取包围盒八个顶点信息
void AABB::getCorners(Vec3 *dst) const
{
assert(dst);
// Near face, specified counter-clockwise looking towards the origin from the positive z-axis.
// 朝着Z轴正方向的面
// 左上顶点坐标
dst[0].set(_min.x, _max.y, _max.z);
// 左下顶点坐标
dst[1].set(_min.x, _min.y, _max.z);
// 右下顶点坐标
dst[2].set(_max.x, _min.y, _max.z);
// 右上顶点坐标
dst[3].set(_max.x, _max.y, _max.z);
// Far face, specified counter-clockwise looking towards the origin from the negative z-axis.
// 朝着Z轴负方向的面
// 右上顶点坐标
dst[4].set(_max.x, _max.y, _min.z);
// 右下顶点坐标.
dst[5].set(_max.x, _min.y, _min.z);
// 左下顶点坐标.
dst[6].set(_min.x, _min.y, _min.z);
// 左上顶点坐标.
dst[7].set(_min.x, _max.y, _min.z);
}
//判断两个包围盒是否碰撞
bool AABB::intersects(const AABB& aabb) const
{
//就是各轴 互相是否包含,(aabb 包含 当前包围盒)|| (当前的包围盒 包含 aabb)
return ((_min.x >= aabb._min.x && _min.x <= aabb._max.x) || (aabb._min.x >= _min.x && aabb._min.x <= _max.x)) &&
((_min.y >= aabb._min.y && _min.y <= aabb._max.y) || (aabb._min.y >= _min.y && aabb._min.y <= _max.y)) &&
((_min.z >= aabb._min.z && _min.z <= aabb._max.z) || (aabb._min.z >= _min.z && aabb._min.z <= _max.z));
}
//判断点和包围盒是否碰撞
bool AABB::containPoint(const Vec3& point) const
{
if (point.x < _min.x) return false;
if (point.y < _min.y) return false;
if (point.z < _min.z) return false;
if (point.x > _max.x) return false;
if (point.y > _max.y) return false;
if (point.z > _max.z) return false;
return true;
}
//生成一个新的包围盒 同时容纳两个包围盒, 新的包围盒 的_min 各轴要是其他两个最小的那个,_max各轴要是其他两个最大的那个
void AABB::merge(const AABB& box)
{
// Calculate the new minimum point.计算新的最小点坐标
_min.x = std::min(_min.x, box._min.x);
_min.y = std::min(_min.y, box._min.y);
_min.z = std::min(_min.z, box._min.z);
// Calculate the new maximum point.计算新的最大点坐标
_max.x = std::max(_max.x, box._max.x);
_max.y = std::max(_max.y, box._max.y);
_max.z = std::max(_max.z, box._max.z);
}
//设置最大顶点与最小顶点
void AABB::set(const Vec3& min, const Vec3& max)
{
this->_min = min;
this->_max = max;
}
//顶点复位 初始化信息
void AABB::reset()
{
_min.set(99999.0f, 99999.0f, 99999.0f);
_max.set(-99999.0f, -99999.0f, -99999.0f);
}
//检测坐标信息是否有误
bool AABB::isEmpty() const
{
return _min.x > _max.x || _min.y > _max.y || _min.z > _max.z;
}
//由给定点坐标点重新确定最大最小的坐标向量
void AABB::updateMinMax(const Vec3* point, ssize_t num)
{
for (ssize_t i = 0; i < num; i++)
{
// Leftmost point.
if (point[i].x < _min.x)
_min.x = point[i].x;
// Lowest point.
if (point[i].y < _min.y)
_min.y = point[i].y;
// Farthest point.
if (point[i].z < _min.z)
_min.z = point[i].z;
// Rightmost point.
if (point[i].x > _max.x)
_max.x = point[i].x;
// Highest point.
if (point[i].y > _max.y)
_max.y = point[i].y;
// Nearest point.
if (point[i].z > _max.z)
_max.z = point[i].z;
}
}
//通过给定的变换矩阵对包围盒进行变换
void AABB::transform(const Mat4& mat)
{
Vec3 corners[8];//保存包围盒八个顶点
// Near face, specified counter-clockwise //朝向z轴正方向的面
// Left-top-front.
corners[0].set(_min.x, _max.y, _max.z);
// Left-bottom-front.
corners[1].set(_min.x, _min.y, _max.z);
// Right-bottom-front.
corners[2].set(_max.x, _min.y, _max.z);
// Right-top-front.
corners[3].set(_max.x, _max.y, _max.z);
// Far face, specified clockwise //朝向z轴负方向的面
// Right-top-back.
corners[4].set(_max.x, _max.y, _min.z);
// Right-bottom-back.
corners[5].set(_max.x, _min.y, _min.z);
// Left-bottom-back.
corners[6].set(_min.x, _min.y, _min.z);
// Left-top-back.
corners[7].set(_min.x, _max.y, _min.z);
//顶点变换
// Transform the corners, recalculate the min and max points along the way.
for (int i = 0; i < 8; i++)
mat.transformPoint(&corners[i]); //mat 是变换矩阵,变换 &corners[i] 向量。
//复位最大顶点最小顶点
reset();
//重新计算最大最小点信息
updateMinMax(corners, 8);
}
NS_CC_END
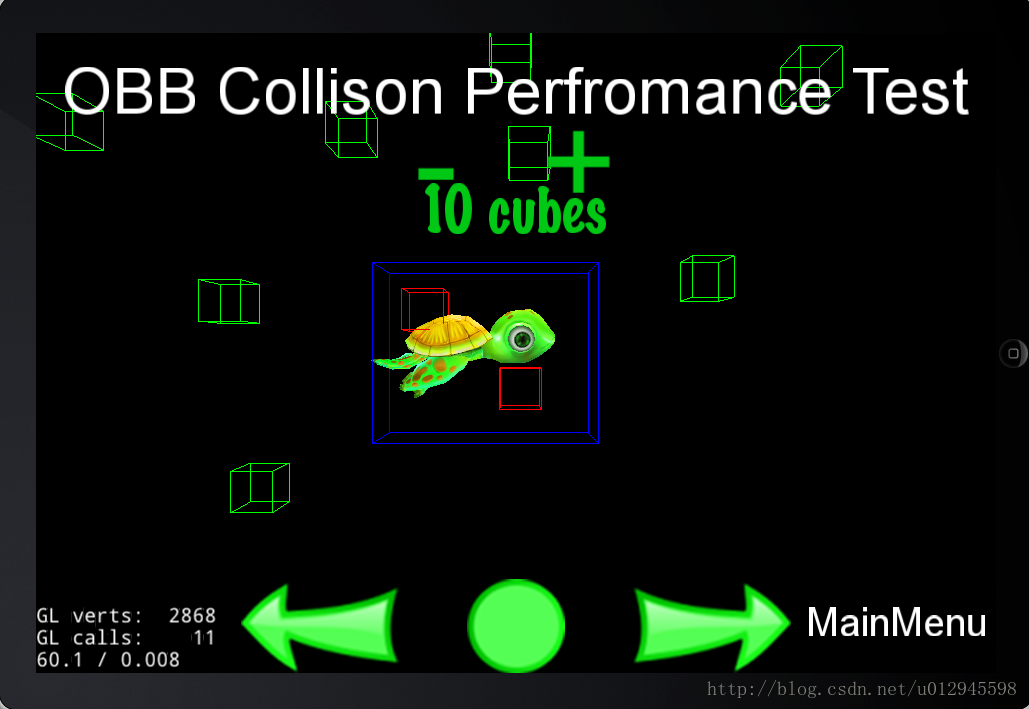
最后,AABB碰撞检测算法虽然计算方法简单,速度快,但是仅适用于精度不搞的游戏中。相对于AABB碰撞检测,还有一种更逼近物体并更为精确的一种算法——OBB碰撞检测。在Cocos2d-x 中同样提供了OBB碰撞检测的相应方法,如图 4-1所示:














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









