






思路
C2D得到大概的目标点在深度像素坐标系下的坐标,然后对这一圈的深度进行处理
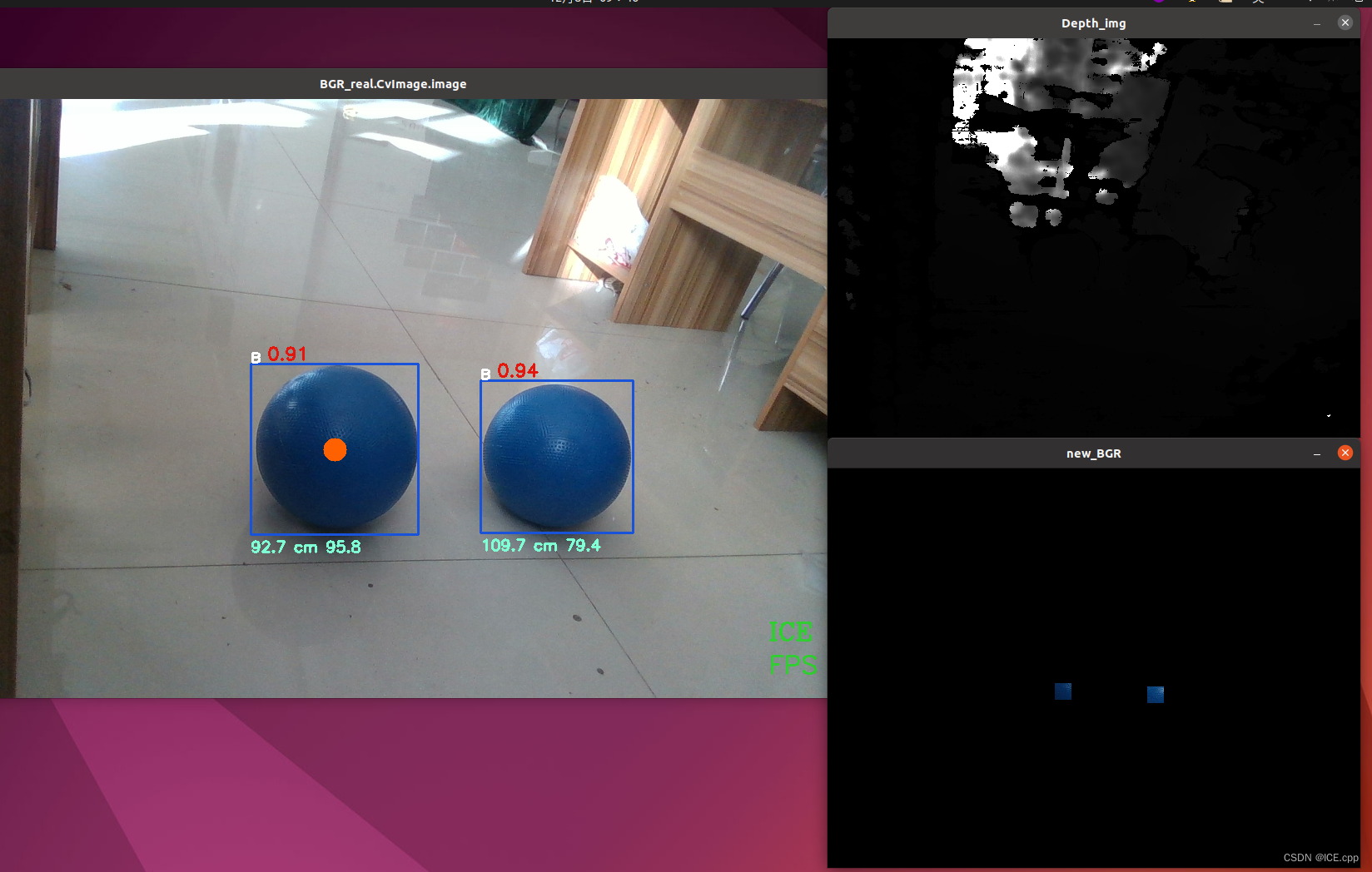
深度,角度,坐标,我都放到参数指针Ball_par里面了,这个函数会返回深度图像上取值的那一圈上色后的图片
效果

源码
懒的写注释和解析了,可读性和可移植性也不算很高,有什么不理解的地方可以和我交流,看见我会回复的
class Ball
{
public:
double dep, probability, angle;
Rect img_Rect;
Eigen::Vector3d cam_pos;
};
Mat Gain_Ball_par(cv_bridge::CvImage last_bgr,
cv_bridge::CvImage Depth_img,
target_bbox_msgs::msg::BoundingBoxes boxes,
Matrix3d dep_camera_matrix,
Matrix3d bgr_camera_matrix,
Matrix4d c2d_outer_matrix,
Matrix4d d2c_outer_matrix,
vector<Ball> &Ball_par)
{
// BGR :( 0 , 0 ) ( 1280 , 720 )
// Dep :( 50, 93 ) ( 584 , 393 )
Eigen::Vector3d Depth_i, BGR_i;
MatrixXd Depth_c_tran = MatrixXd::Constant(4, 1, 1.0);
vector<double> dep_vec;
vector<Point2i> target_pos_vec;
Mat Depth_BGR(480, 640, CV_8UC3, cv::Scalar(0, 0, 0));
MatrixXd bgr_camera_matrix_inverse = MatrixXd::Constant(4, 3, 0.0);
bgr_camera_matrix_inverse.block<3, 3>(0, 0) = bgr_camera_matrix.inverse();
MatrixXd bgr_camera_matrix_uninverse = MatrixXd::Constant(3, 4, 0.0);
bgr_camera_matrix_uninverse.block<3, 3>(0, 0) = bgr_camera_matrix;
MatrixXd dep_camera_matrix_uninverse = MatrixXd::Constant(3, 4, 1.0);
dep_camera_matrix_uninverse.block<3, 3>(0, 0) = dep_camera_matrix;
for (const auto &ball : Ball_par)
{
Depth_i = dep_camera_matrix_uninverse * c2d_outer_matrix * bgr_camera_matrix_inverse * 1 * Eigen::Vector3d(ball.img_Rect.x + ball.img_Rect.width / 2, ball.img_Rect.y + ball.img_Rect.height / 2, 1);
// 由于bgr_camera_matrix_inverse的误差,相对于旧方法会导致x轴多6,所以这里减6
target_pos_vec.push_back(Point2i((Depth_i / Depth_i(2, 0))(0, 0) - 6, (Depth_i / Depth_i(2, 0))(1, 0)));
}
for (int k = 0; k < boxes.bounding_boxes.size(); k++)
{
double dep_sum = 0;
//给框限幅,不然出去了
for (int i = ((target_pos_vec[k].x - dep_box_size) < c2d_x_min ? c2d_x_min : min(target_pos_vec[k].x - dep_box_size, c2d_x_max));
i < ((target_pos_vec[k].x + dep_box_size) < c2d_x_min ? c2d_x_min : min(target_pos_vec[k].x + dep_box_size, c2d_x_max)); i++)
{
for (int j = ((target_pos_vec[k].y - dep_box_size) < c2d_y_min ? c2d_y_min : min(target_pos_vec[k].y - dep_box_size, c2d_y_max));
j < ((target_pos_vec[k].y + dep_box_size) < c2d_y_min ? c2d_y_min : min(target_pos_vec[k].y + dep_box_size, c2d_y_max)); j++)
{
float depth = Depth_img.image.at<uint16_t>(j, i) * pow(10.0, -1);
if (depth != 0)
{
c2d_real.dep_vector.push_back(depth);
dep_sum += depth;
// 如果按照上面c2d的那个式子套用dep_camera_matrix_inverse,误差非常大,所以还是老老实实算Depth_c_tran
Depth_c_tran.block<3, 1>(0, 0) = depth * dep_camera_matrix.inverse() * Eigen::Vector3d(i, j, 1);
BGR_i = bgr_camera_matrix_uninverse * d2c_outer_matrix * Depth_c_tran;
if (!last_bgr.image.empty())
{
//给深度图上色,知道测的是哪块区域
cv::Vec3b pixel = last_bgr.image.at<cv::Vec3b>(round((BGR_i / BGR_i(2, 0))(1, 0)), round((BGR_i / BGR_i(2, 0))(0, 0)));
Depth_BGR.at<cv::Vec3b>(j, i) = pixel;
}
}
}
}
Ball_par[k].cam_pos = ((dep_sum / c2d_real.dep_vector.size()) * dep_camera_matrix.inverse() * Eigen::Vector3d(target_pos_vec[k].x, target_pos_vec[k].y, 1.0));
Ball_par[k].dep = sqrt((pow(Ball_par[k].cam_pos(0, 0), 2.0) + pow(Ball_par[k].cam_pos(2, 0), 2.0)));
Ball_par[k].angle = atan2(Ball_par[k].cam_pos(2, 0), Ball_par[k].cam_pos(0, 0)) * 180.0 / M_PI;
//深度图误差有点大,很多数据都采集不了,结果就是nan,我把nan的赋值成999
if (isnan(Ball_par[k].dep))
{
Ball_par[k].cam_pos << 999, 999, 999;
Ball_par[k].dep = 999;
Ball_par[k].angle = 999;
}
c2d_real.dep_vector.clear();
}
imshow("new_BGR", Depth_BGR);
return Depth_BGR;
}














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









