







【地面点云分割】常见方法和优缺点(一)
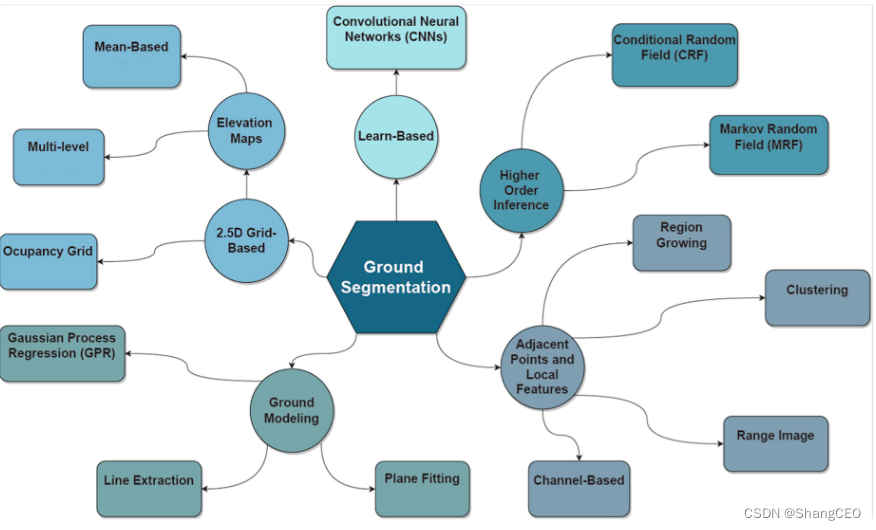
此图片来源: A Survey on Ground Segmentation Methods for Automotive LiDAR Sensors.
一、2.5D 网格方法
1、高程图(Elevation Maps)
概念:
高程图方法将3D点云数据映射到2D栅格中,每个栅格单元包含该区域内点的平均高度或其他统计特征。这种方法可以减少数据处理的复杂性。
优点:
- 计算效率高:通过减少数据维度,计算需求显著降低。
- 降噪效果好:通过平均高度减少单点噪声的影响。
缺点:
- 无法处理悬空物:对于有悬空物的场景,如桥梁或树木,表现较差。
- 垂直细节丢失:无法准确表示垂直方向上的结构差异。
2、占用网格(Occupancy Grids)
概念:
占用网格方法将空间划分为细小的栅格,每个栅格表示该区域是否被占据。通过
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3230
3230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









