



说明:本文将安装如下软件:vmware17pro、Ubuntu18.04.06、ROS-Melodic
第一步:下载vm虚拟机
可通过链接文章步骤安装最新版免费vm虚拟机:VMware Workstation Pro 17官网下载安装教程_vmware17pro下载-CSDN博客
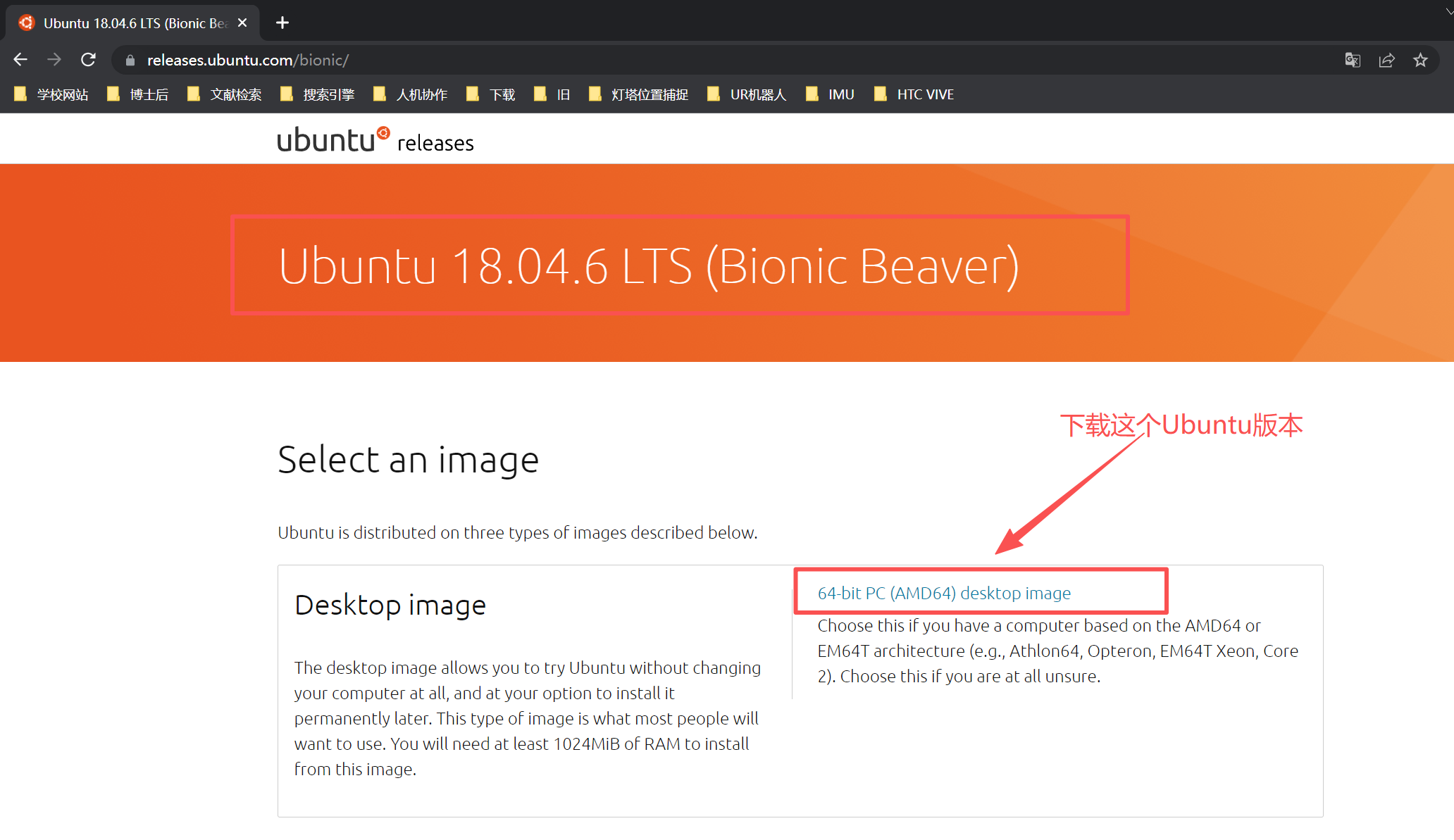
第二步:搭建Ubuntu系统
下载链接:Ubuntu 18.04.6 LTS (Bionic Beaver)
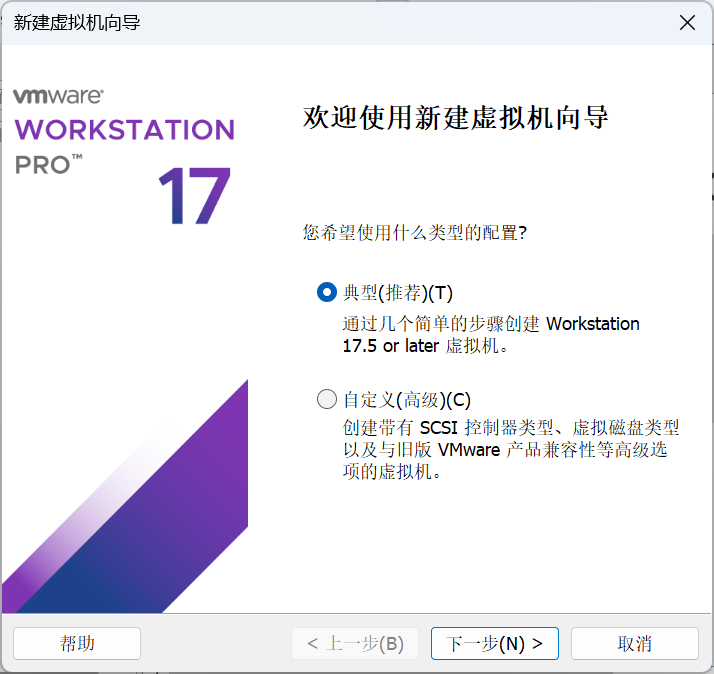
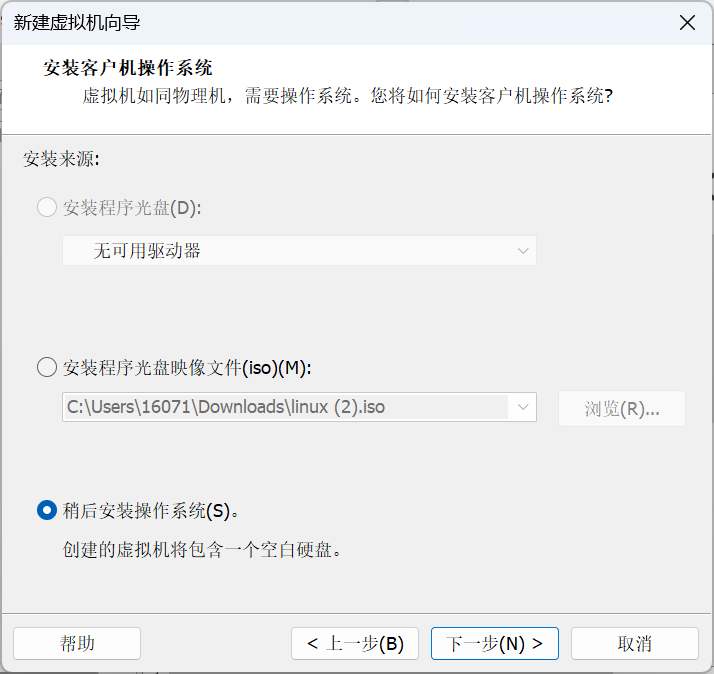
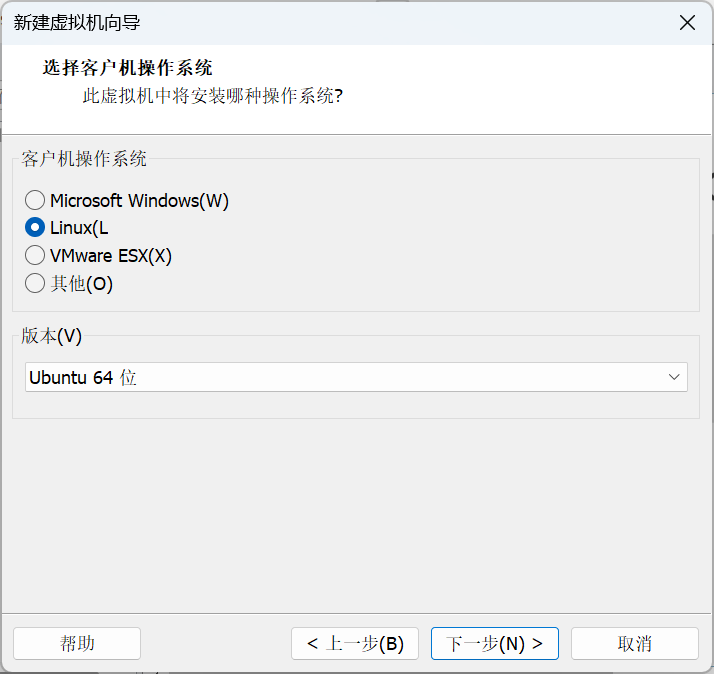
下载好后打开vm
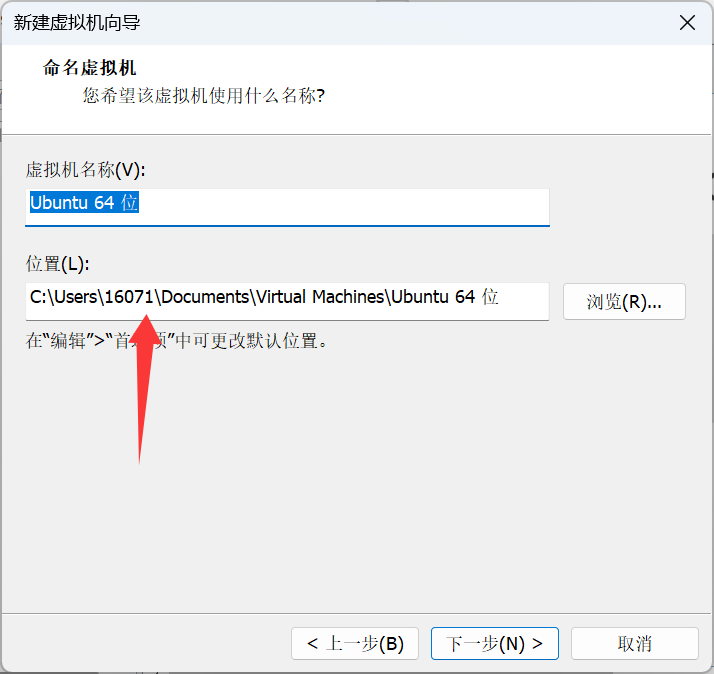
点击创建虚拟机
这一步最好改一下位置:
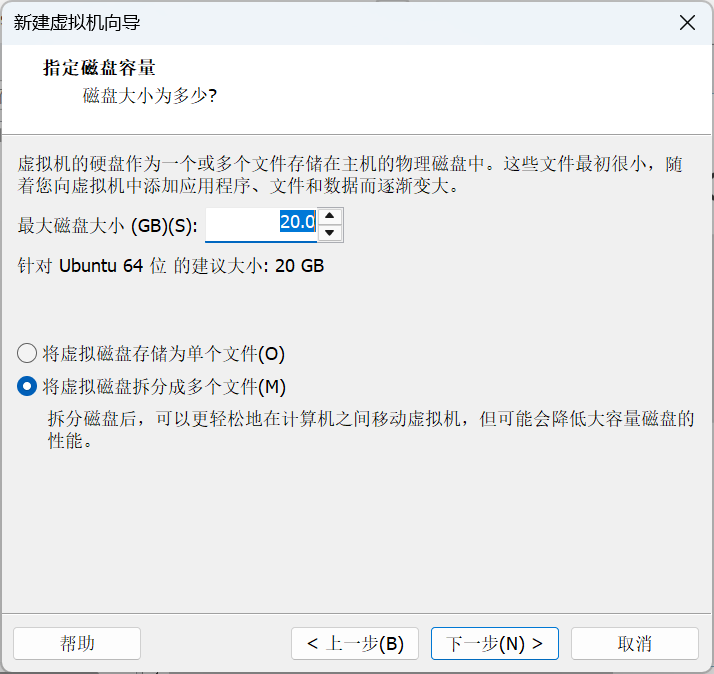
设置磁盘大小:有条件的可以多分配一点,我分配了60G
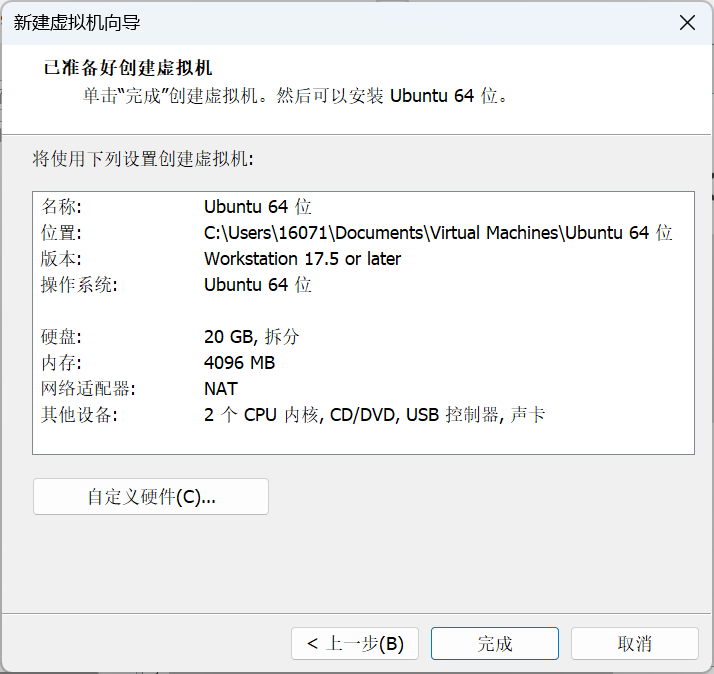
点击完成:
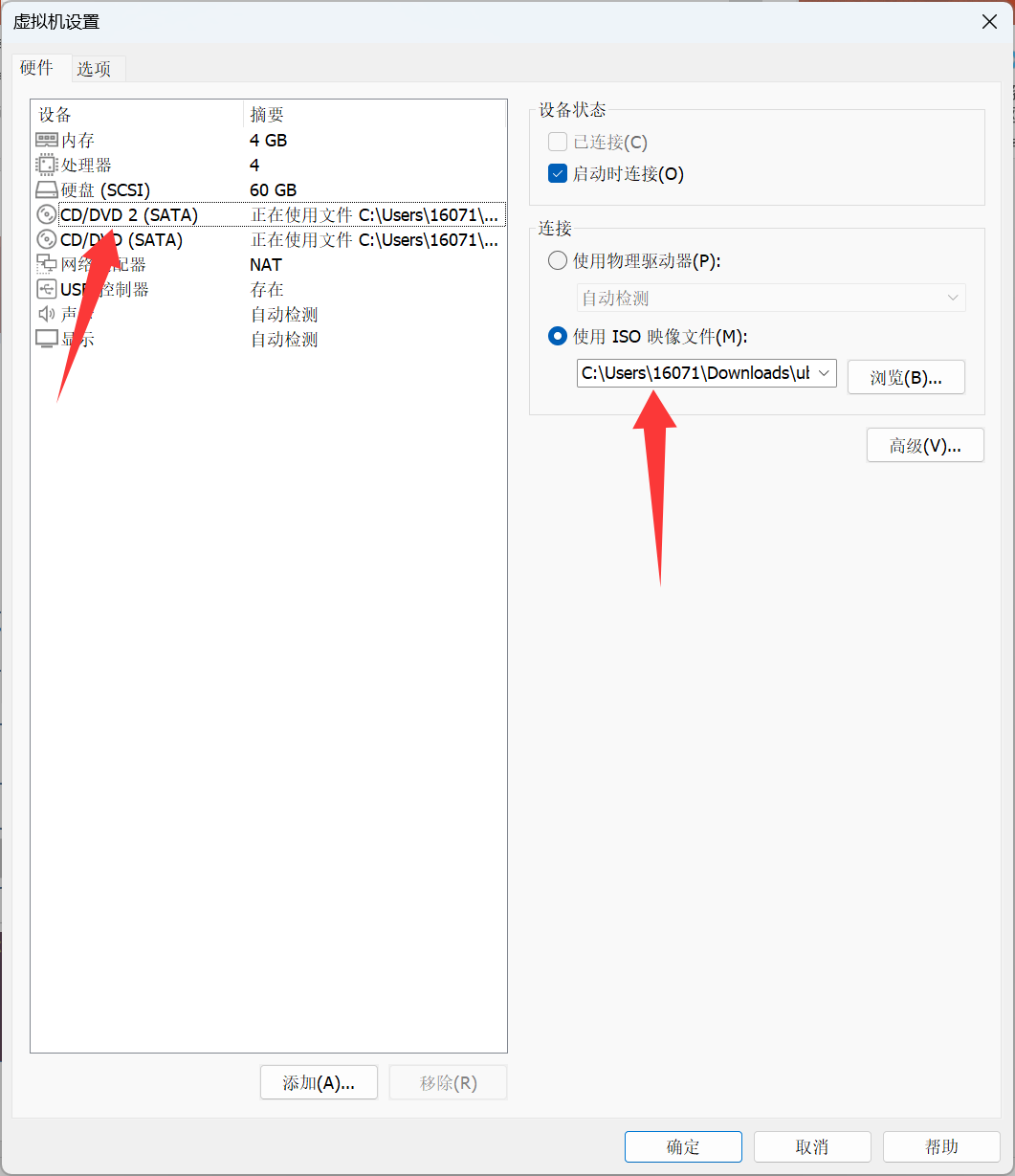
这样就创建好了虚拟机,然后点击编辑虚拟机位置:
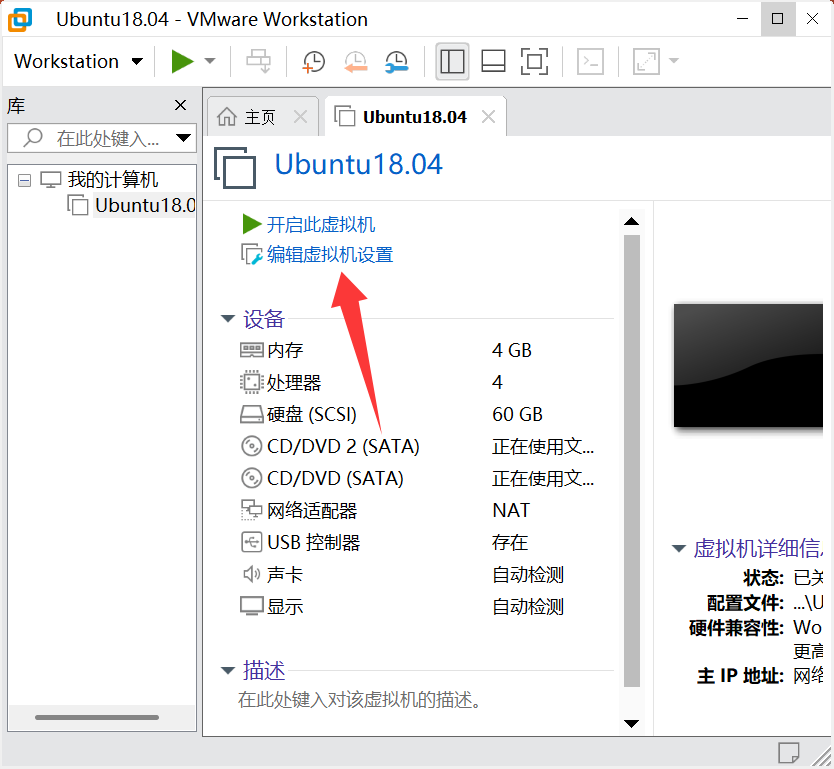
选择cd,使用iso,把之前下载好的Ubuntu放上去,点击确定:
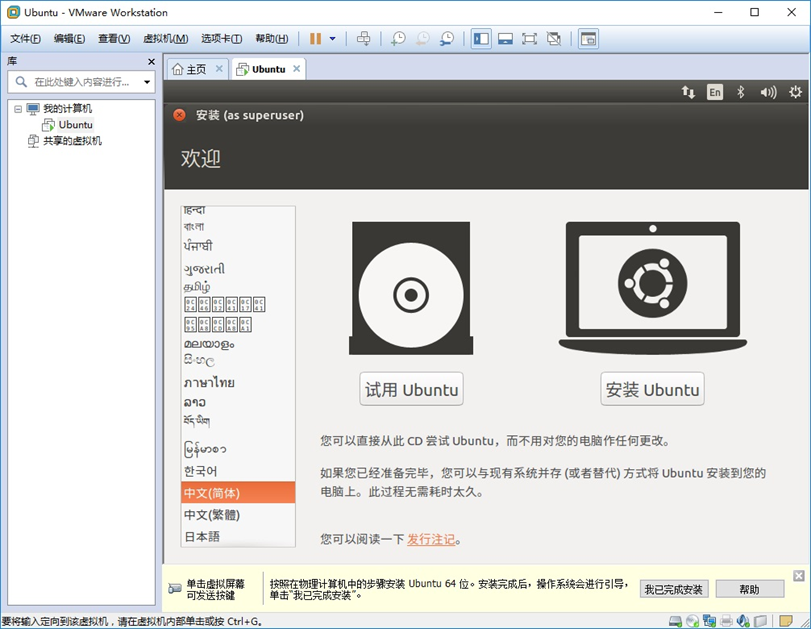
点击开启虚拟机
进入安装界面后,将语言改为简体中文然后点击安装Ubuntu
然后一直点继续,最后到用户设置界面:
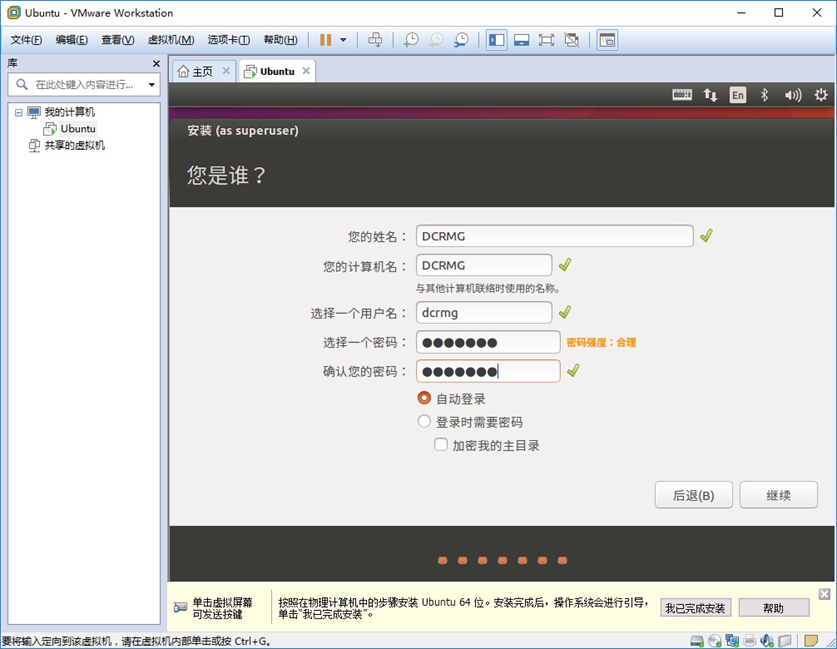
输入好自己的个人信息后点击继续,然后它会提示你重启系统,点击现在重启
注意,重启后可能会卡在黑屏界面,上面有一两行英文,这时候直接关闭虚拟机然后再打开虚拟机就可以进入系统了。
安装好vm后,还要安装vm tools来实现屏幕自适应和与虚拟机外进行复制粘贴的功能
新版本的vm tools可能无法直接安装,需要曲线救国,通过如下步骤实现:
点击虚拟机,窗口长的直接有,短的点workstation
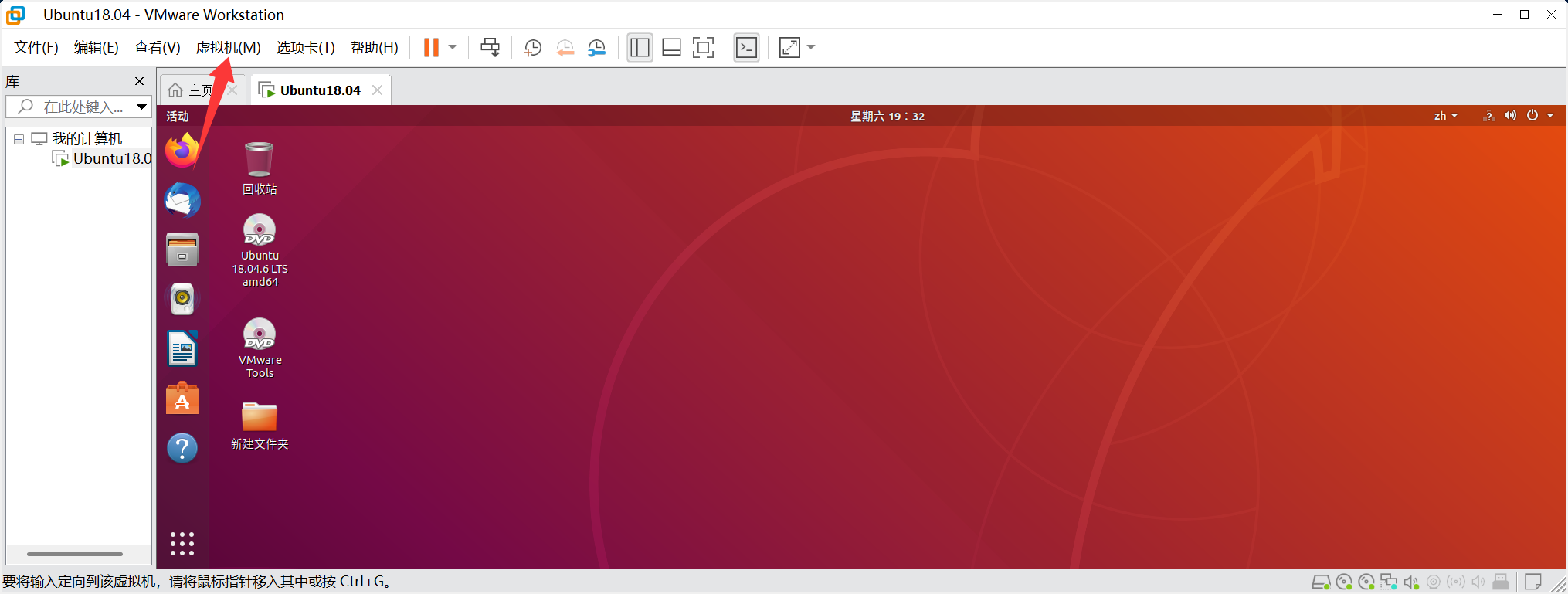
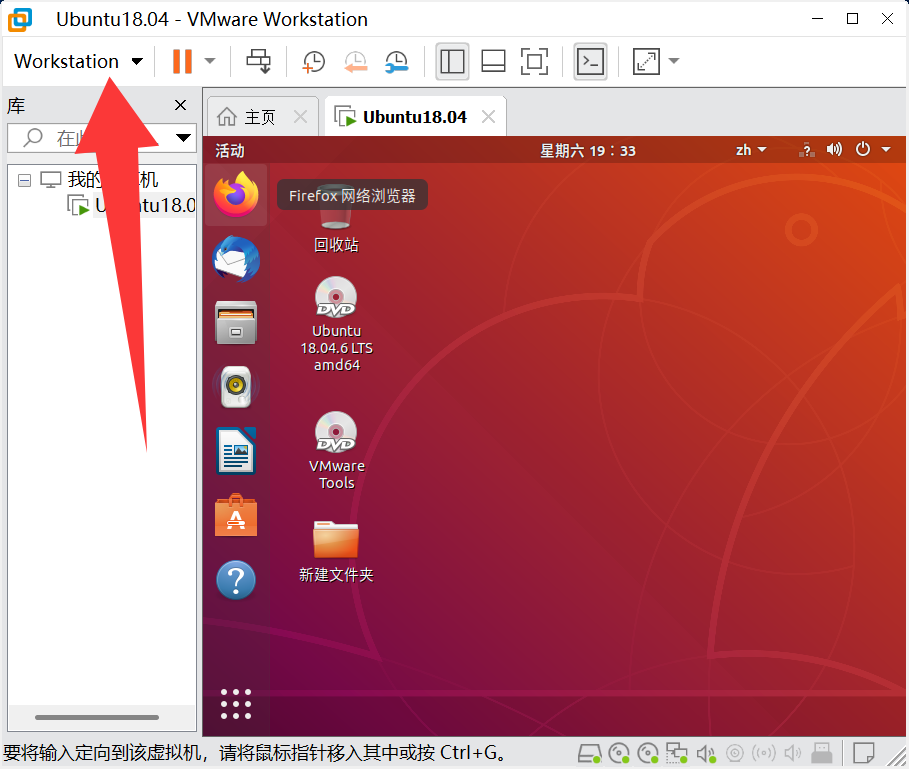
点击里面的安装VMware tools
如果能直接安装上,那么恭喜你
如果显示无法安装vm tools的弹窗,点击第一个链接,就会自动下载一个iso镜像文件,然后我们关掉虚拟机。

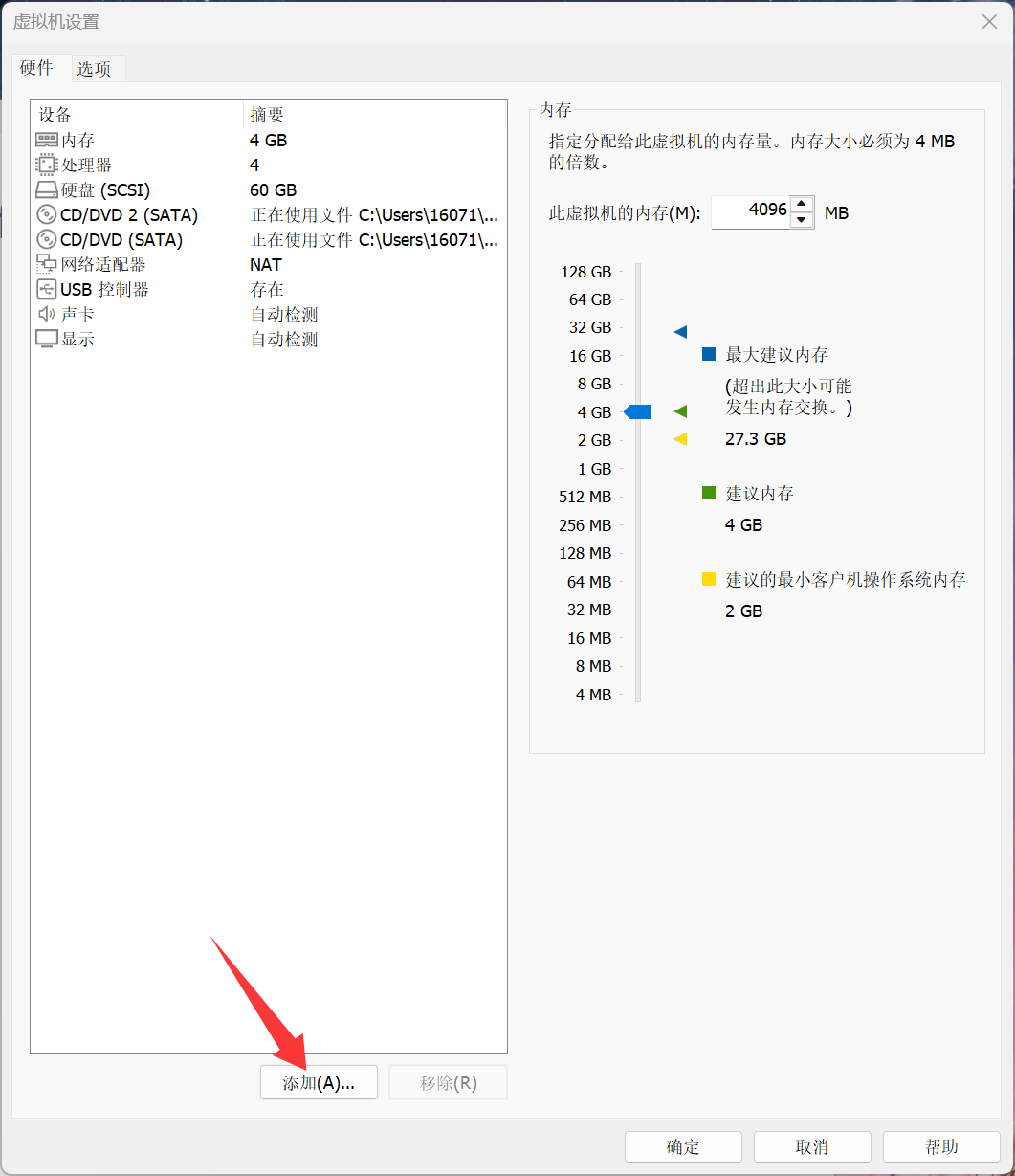
跟第一次一样,点击编辑虚拟机设置
添加cd,然后选择我们刚刚下好的iso文件
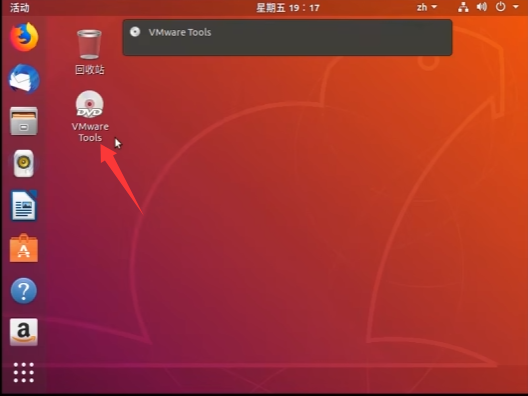
打开虚拟机,就会发现桌面上有这么一个文件了,双击打开这个光盘:
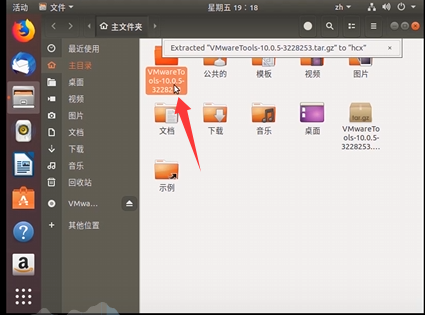
将这个文件复制粘贴到主目录
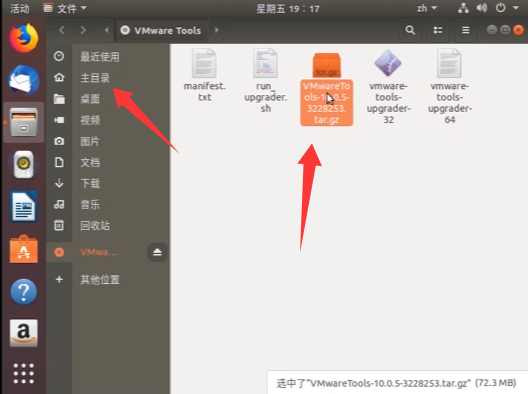
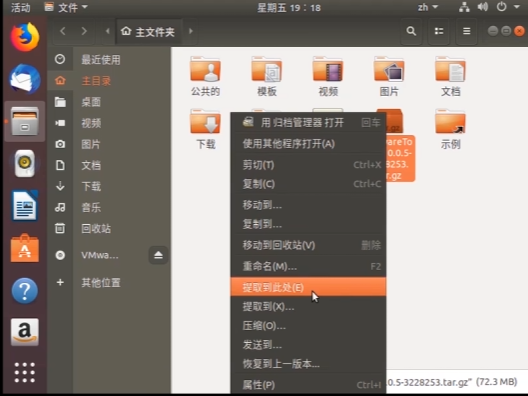
然后提取到此处
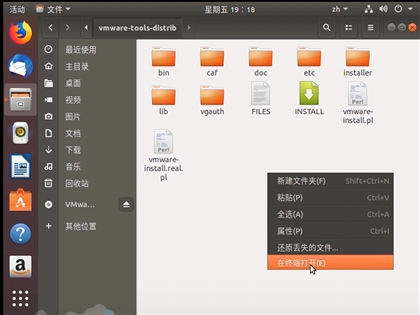
依次点击进入
在这个页面右键打开终端
输入如下命令:sudo ./vmware-install.pl
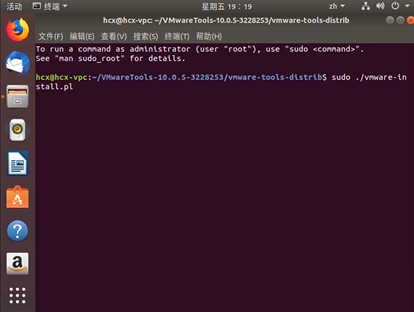
点击回车,然后提示输入密码,这里输入密码,页面是没变化的,输入完成后直接回车就行了
稍作等待后vm tools就安装成功了
注意:一定要测试一下能否拖拽文件
如果不可以的话,关闭windows防火墙,再次测试。
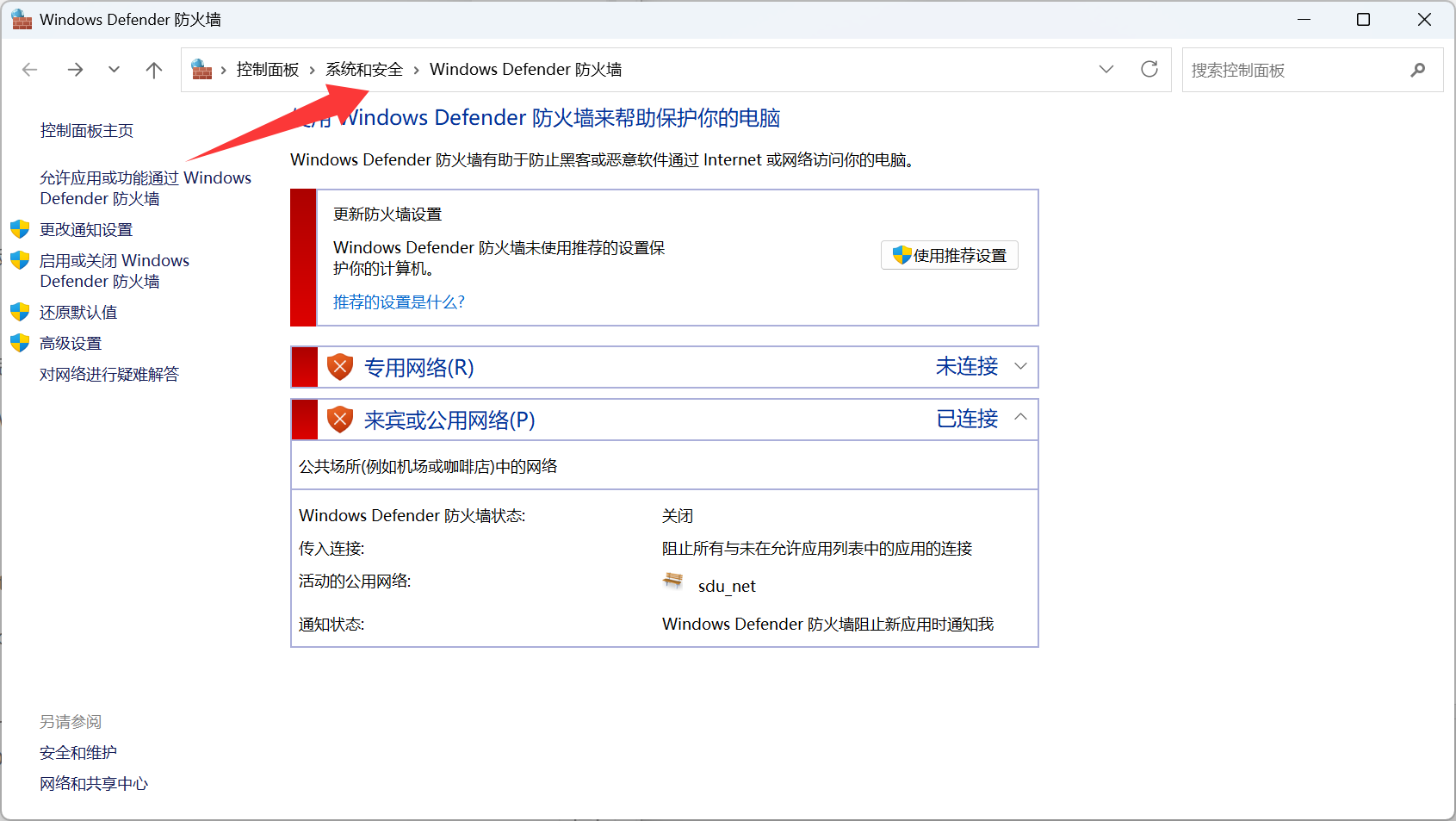
windows防火墙关闭步骤如下:
在搜索中输入控制面板,并打开控制面板
以此点击这些,然后在这个界面关闭防火墙
再次测试,如果可以实现拖拽,这样准备工作就做完了。
ps:如果不使用vm tools的时候记得打开Windows防火墙
第三步:安装ROS
安装前先检查一下环境配置:
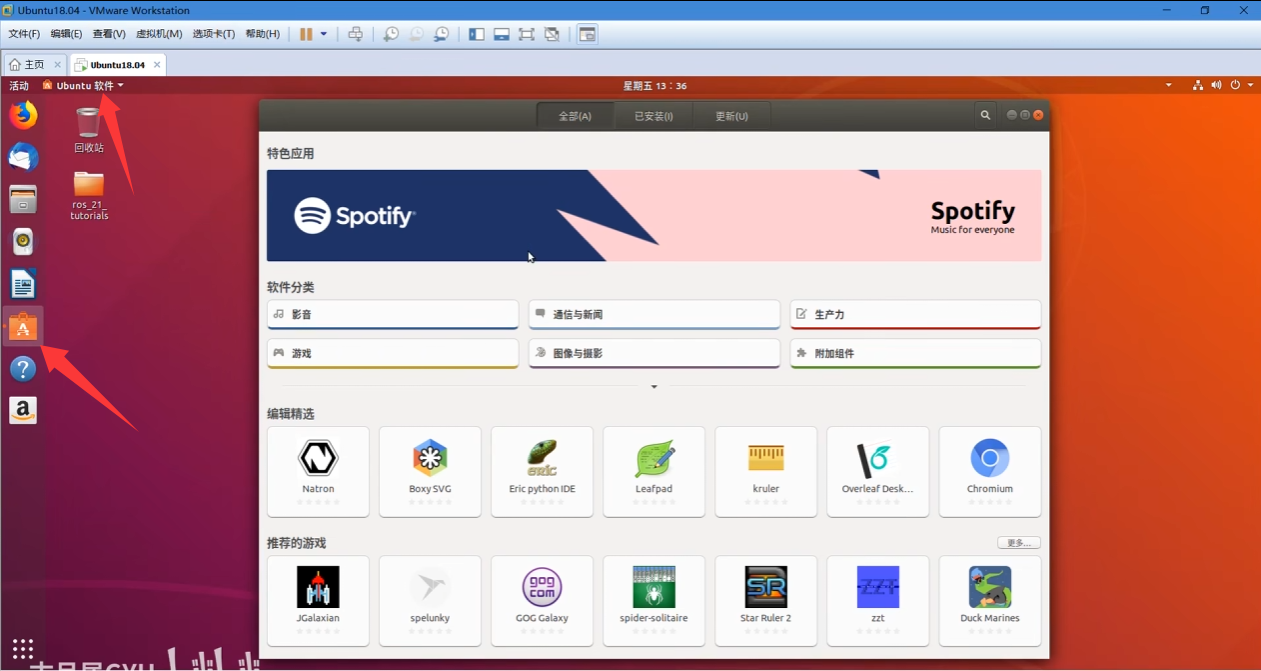
看一下下面四个是否打勾:
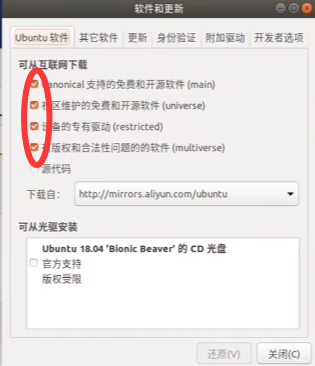
再更改一下下载链接环境:

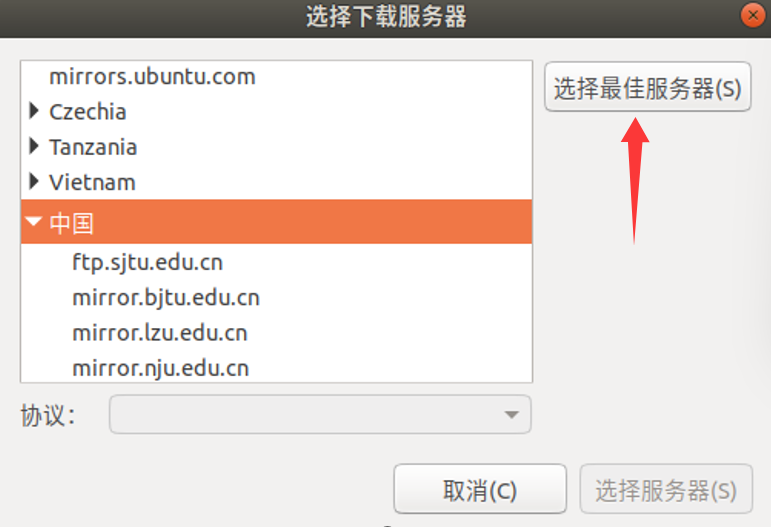
输入密码,然后点击关闭
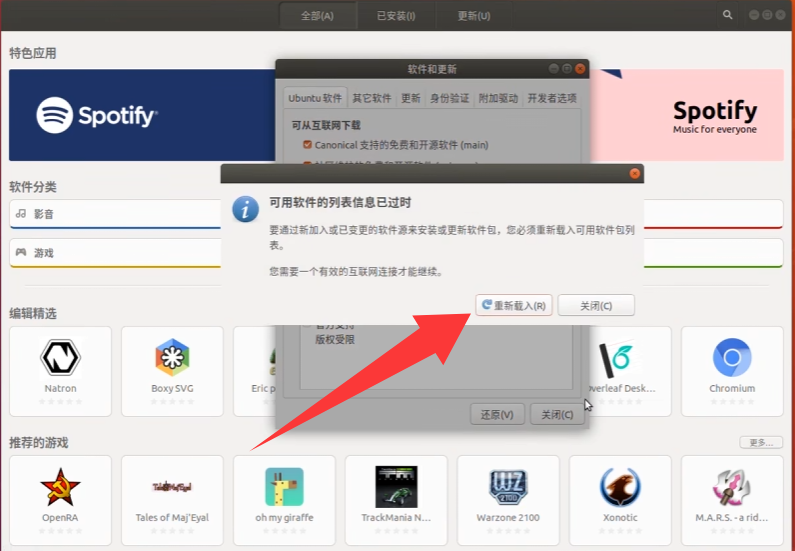
等会加载好后关闭就可以了,后面开始下载ROS
打开终端,依次输入如下命令:
ps:该系统下复制粘贴快捷键是ctrl+shift+c/v
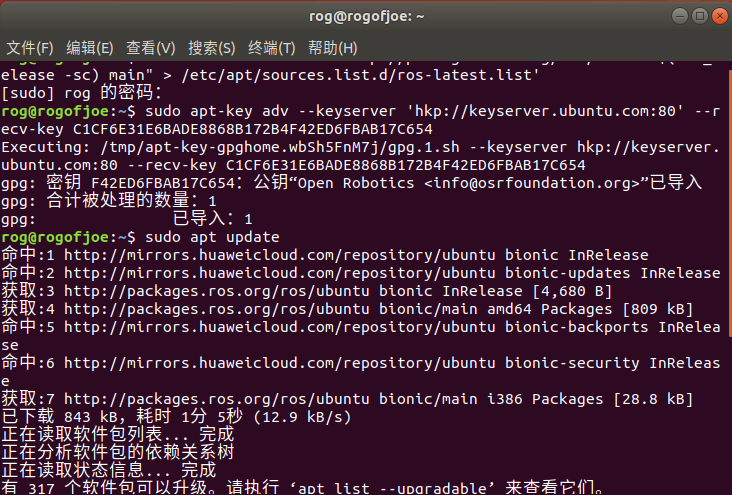
第一个:sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
第二个:sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
第三个: sudo apt update
全部成功的截图如下所示:
然后输入如下命令:
sudo apt install ros-melodic-desktop-full
输入yes并回车,并稍作等待
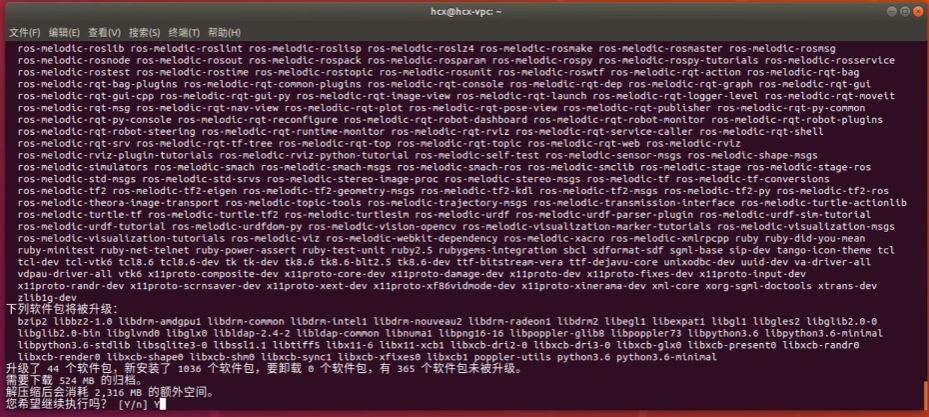
1 thousand hours later:
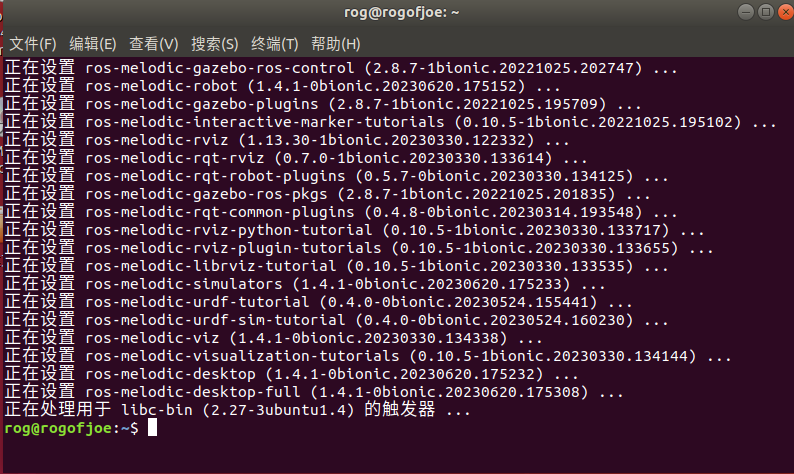
这样就下好了
接着输入如下指令:
sudo apt install python3-rosdep 2
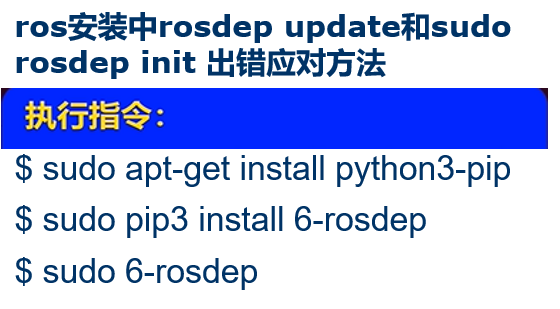
sudo rosdep init
输入完这个指令之后如果报error,把校园网换成手机热点再试一次,如图所示
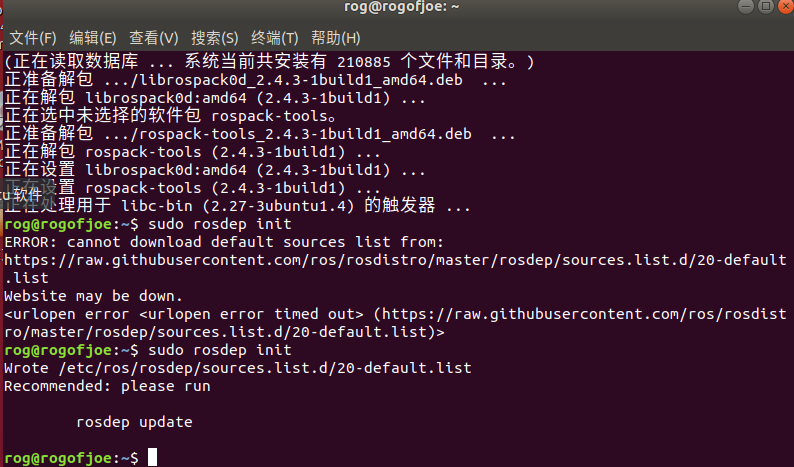
或者
之后依次输入如下命令:
rosdep update
这两个命令输入后按回车就行了:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
下面命令输入后,输入y,稍作等待:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential

这样ros就算安装好了
然后验证一下是否安装成功,输入指令:
roscore

然后再打开两个终端
分别输入
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
点击最后一个终端,就可以控制小海龟移动啦
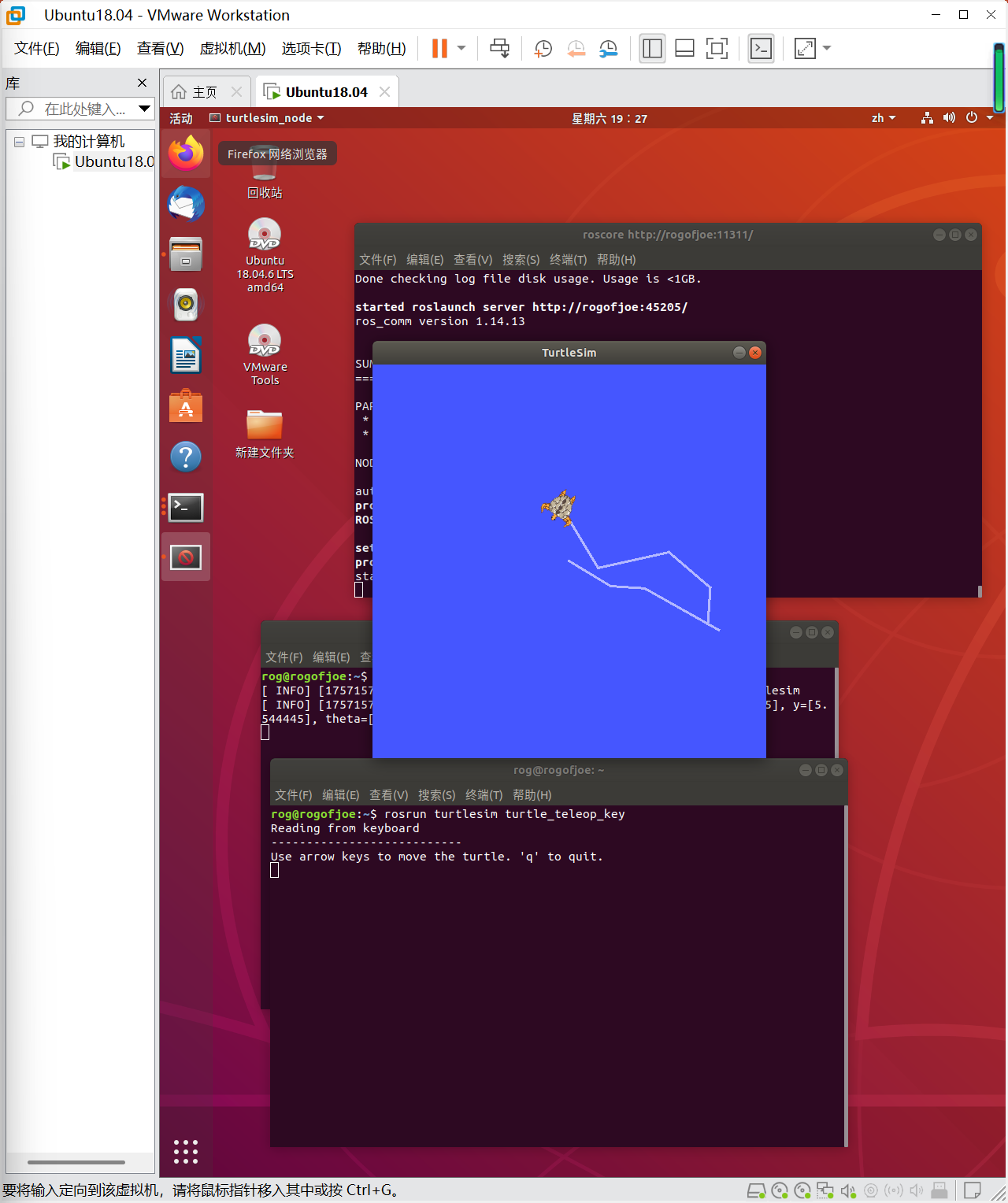
这样就算全部完成了,感谢您的观看!

















 445
445

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









