









系统:Ubuntu22.04 ROS2 humble(之前也用20.04foxy尝试了,但是在运行配置助手那边总是不能加载,网上也没看到解决方法暂时搁浅,有类似情况的好兄弟们可以交流一下)
1、前期准备环境搭建,ubuntu22.04,ros2,moveit等
ubuntu安装教程很多,安装好对应版本就没有问题,ros2可以在安装完成ubuntu后进行鱼香ros一键安装,方便快捷,不过多赘述,参考链接:
moveit2安装(二进制安装方便快捷)
sudo apt install ros-humble-moveit运行不报错即可
安装配置助手
sudo apt install ros-humble-moveit ros-humble-moveit-setup-assistant -y
2、运行配置助手(在src同级别目录下打开终端),首先记得先编译并source功能包,source过功能包,urdf里对机械臂描述中使用的package://elite_description才能被找到。
colcon build
source install/setup.bash
之后运行助手
ros2 run moveit_setup_assistant moveit_setup_assistant
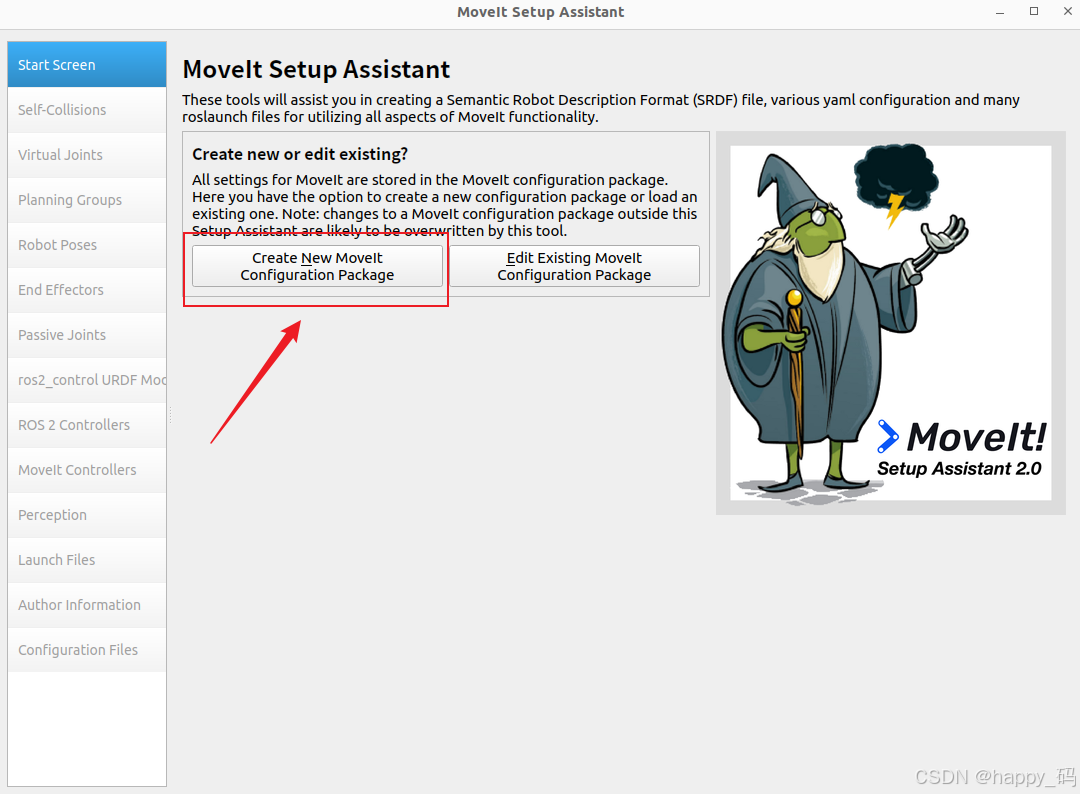
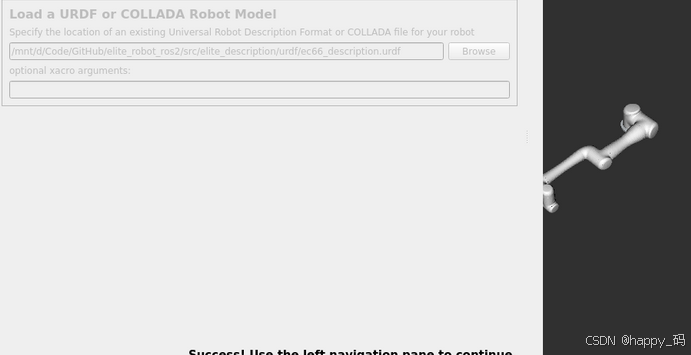
图中有两个按钮,左边是创建新的配置包,另一个是编辑已经配置好的包,选择创建新的
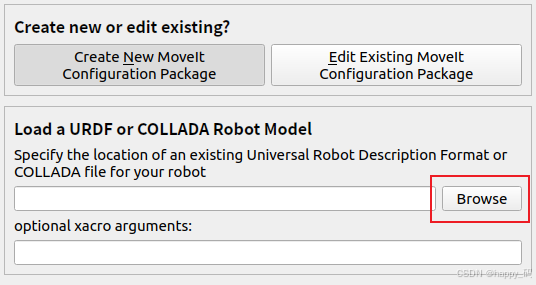
browse这里去找到你的urdf文件,如果不是这个文件需要去转换成urdf使用
 找到后点击
找到后点击
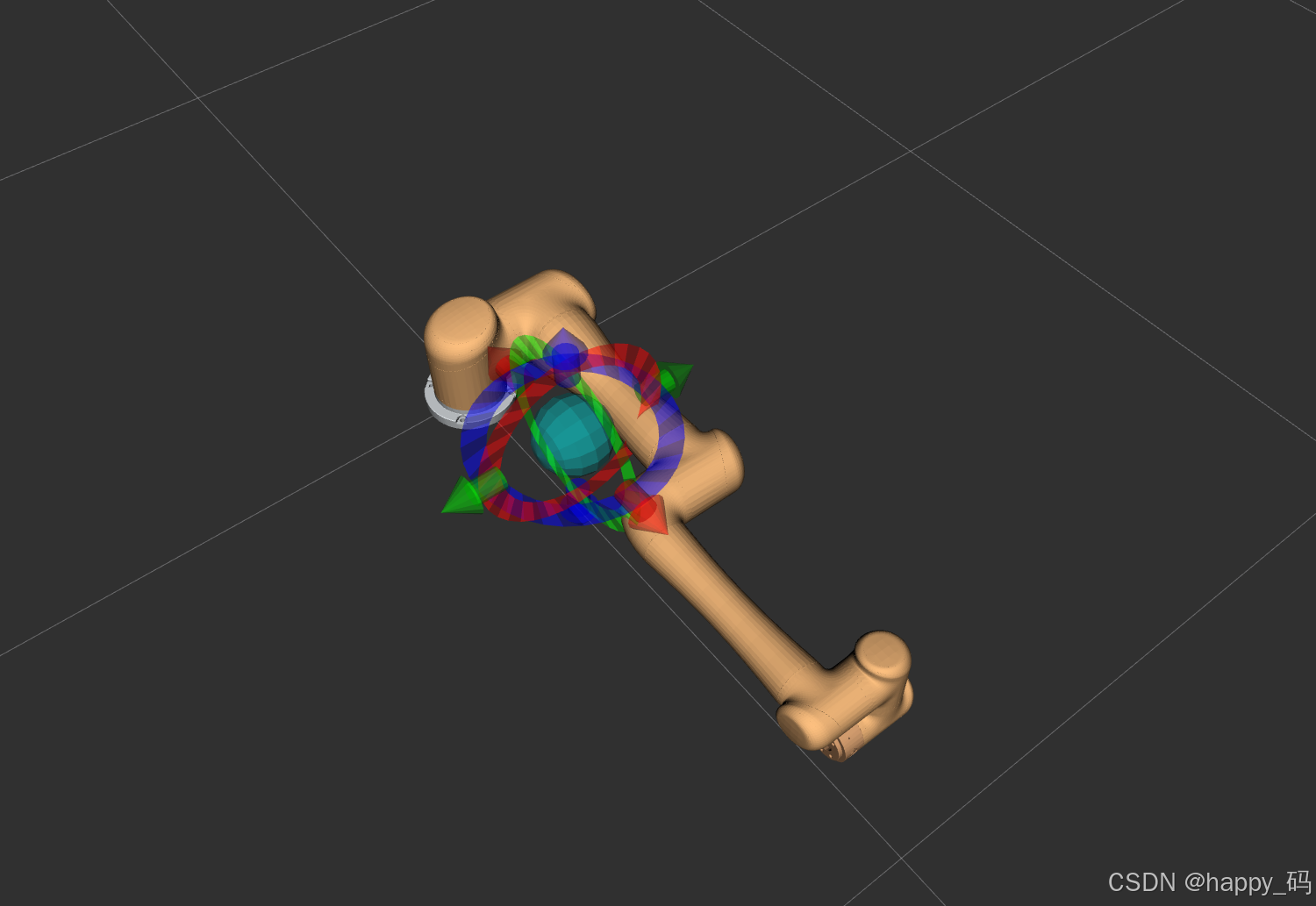
一般右侧显示出机械臂模型,加载成功
按照步骤点击
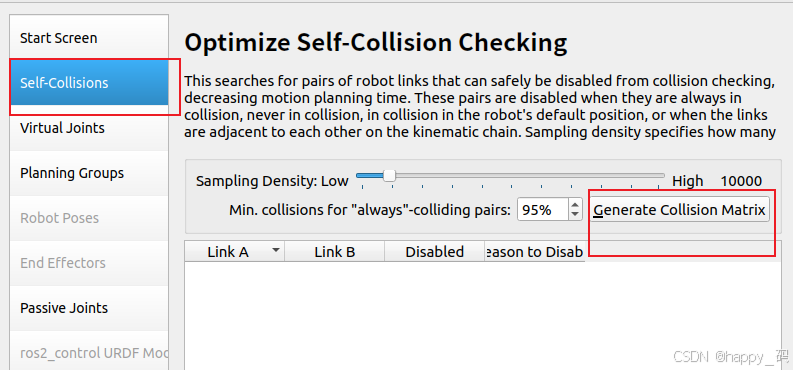
设置自我碰撞
第三个虚拟关节可以跳过
规划组比较重要,添加组
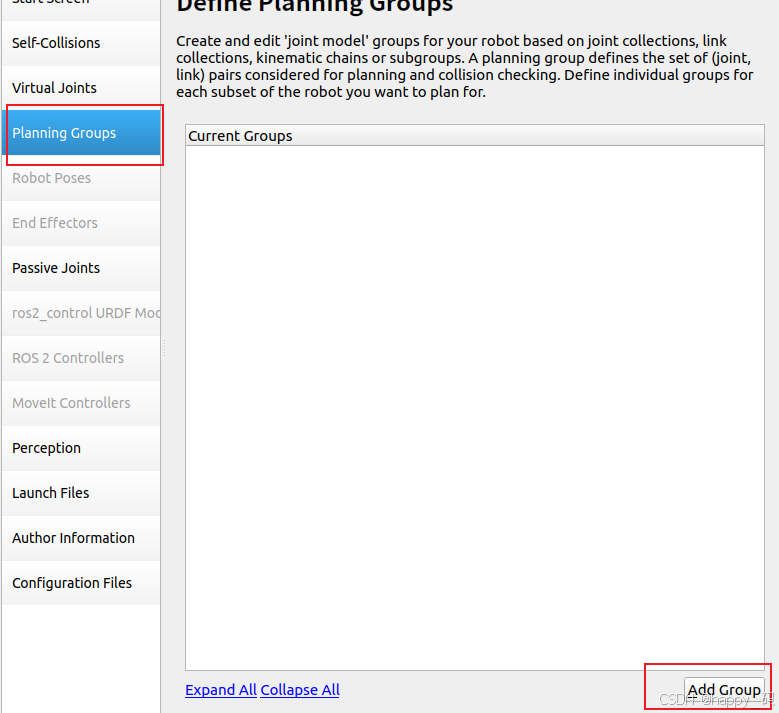
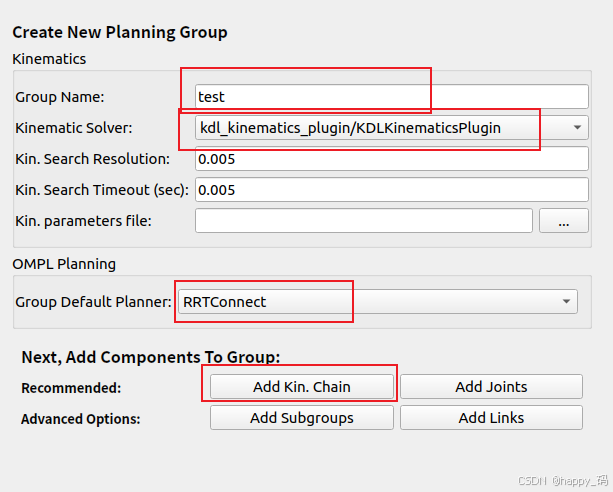
挨个填上,规划组的概念是Moveit中非常重要的概念,后续的控制都是基于规划组进行的,这里只是一个六轴的机械臂,只添加一个规划组就可以,点击add kin.chain进入
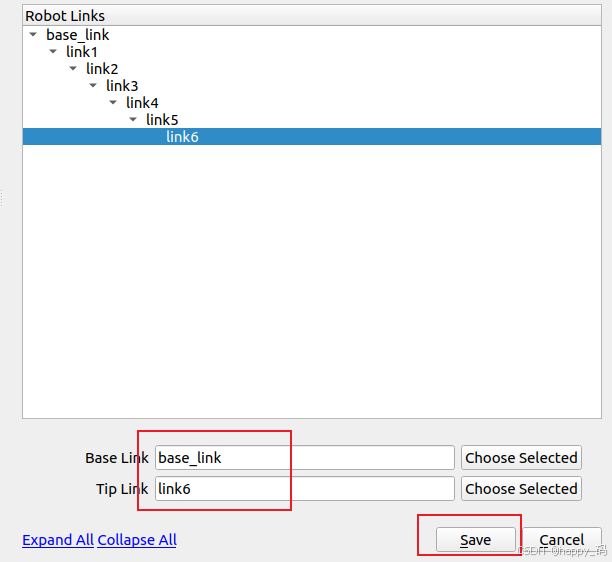
接着点击保存
机器人位姿
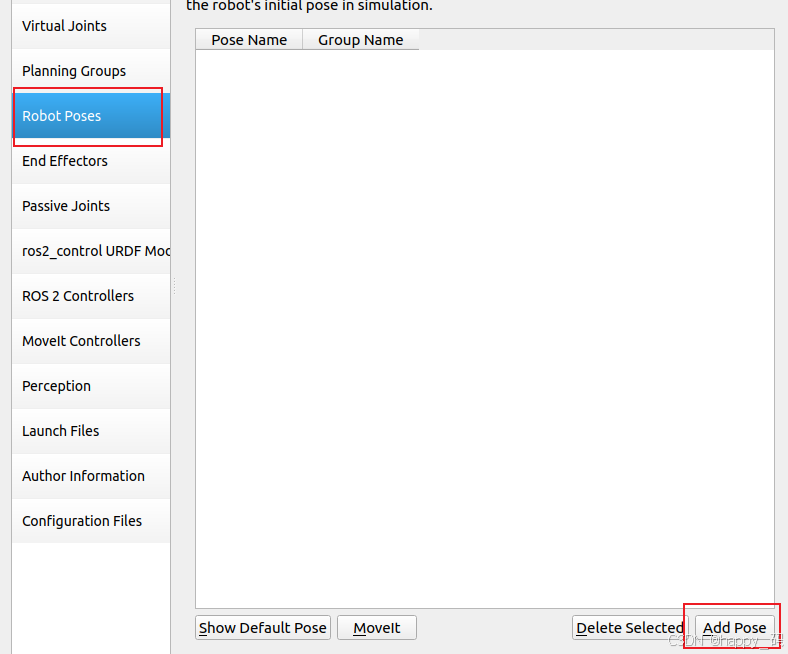
可以预设几个机器人姿态
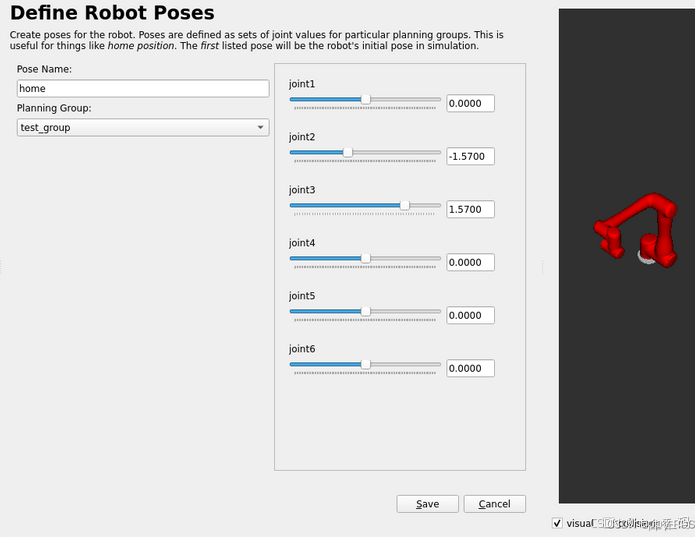
点击保存
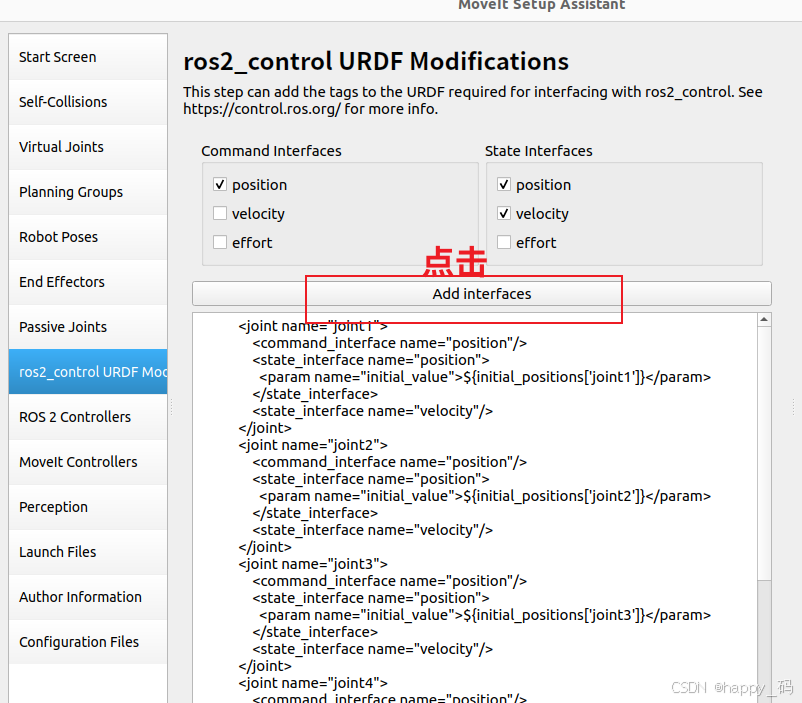
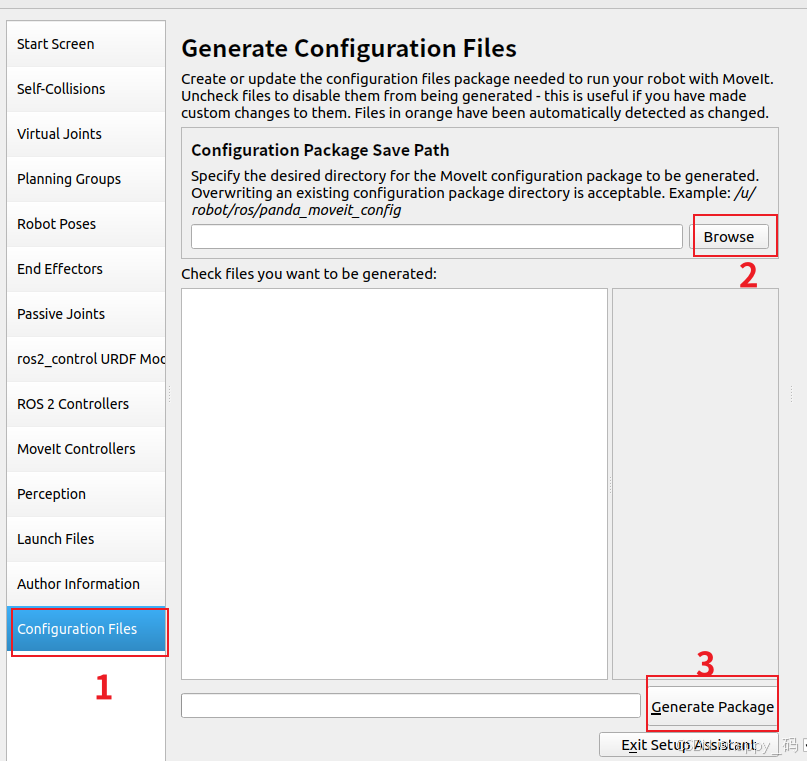
接着配置ros_control URDF Modiificatoins
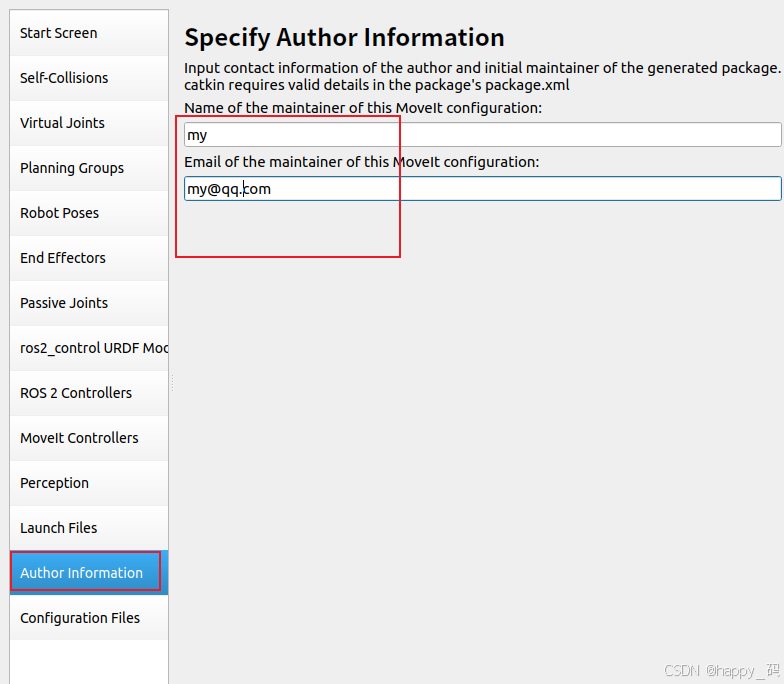
继续配置作者信息,随便写一个即可(不要忘记!!!会报错)
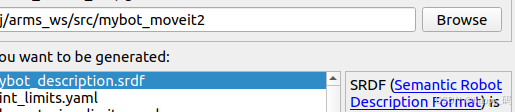
生成功能包
 接着可以开始运行demo了
接着可以开始运行demo了
在src目录下打开终端
colcon build
source install/setup.bash
ros2 launch mybot_moveit2 demo.launch.py

运行成功!
备注:ros2 launch mybot_moveit2 demo.launch.py上述指令这句里面的 mybot_moveit2是一个创建的文件夹
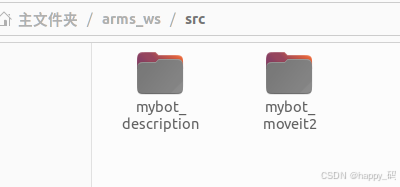
里面的内容是在生成功能包环节的browse过程在放进去的
总结:一步一个坑,感觉内容繁琐,记录一下方便下次回忆
学习参考博客:
动手学Moveit2 | 运行配置好的机械臂功能demo_python humble moveit2-CSDN博客

















 5200
5200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









