







说明:UR3+大寰AFG-95机械爪。配置moveit_setup_assistant ,通过moveit控制机器人系统运动(笔记)。
一.moveit_setup_assistant 配置
1. xarco文件位置:ur_platform_description/urdf/ur_platform.urdf.xarco
2.运行moveit_setup_assistant
roscore
新开一个终端运行:
source ./devel/setup.bash
rosrun moveit_setup_assistant moveit_setup_assistant
3.选择xacro文件
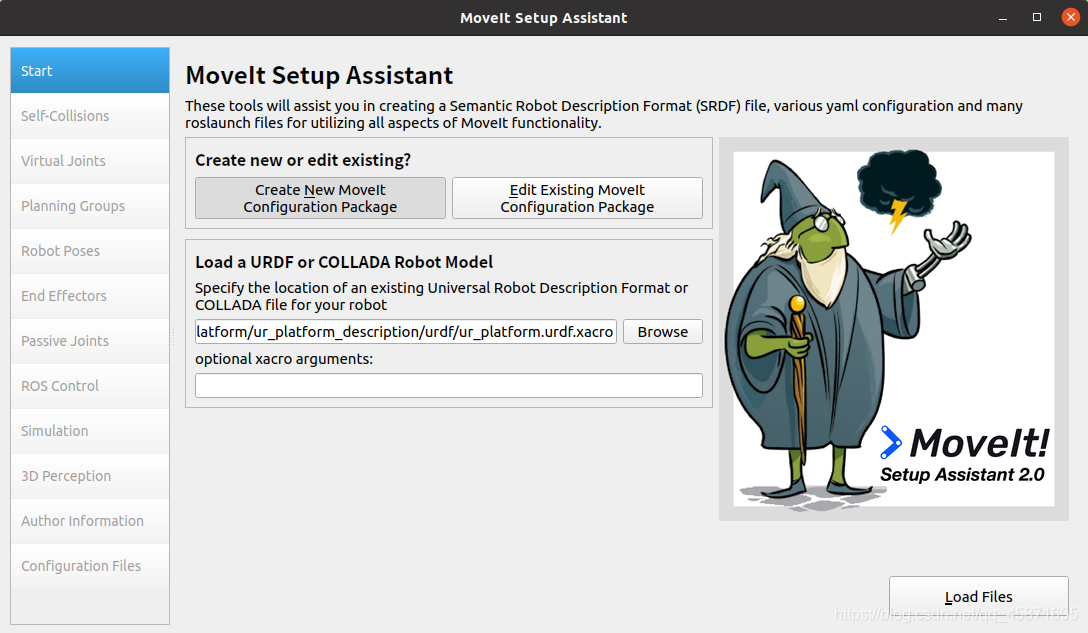
4.点击Load Files

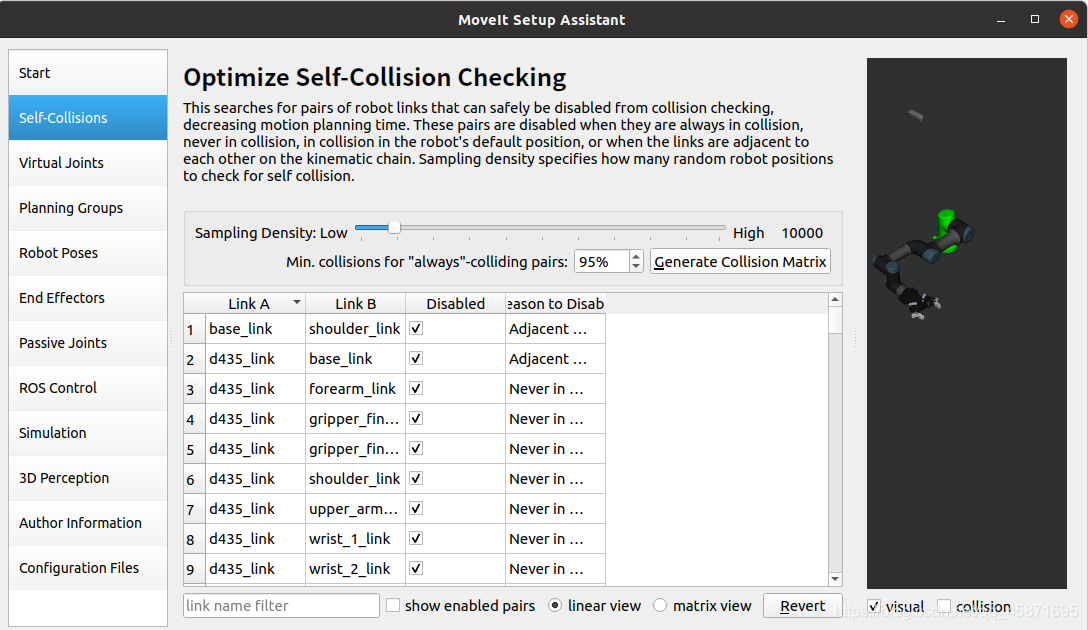
5.点击Generate Collision Matrix
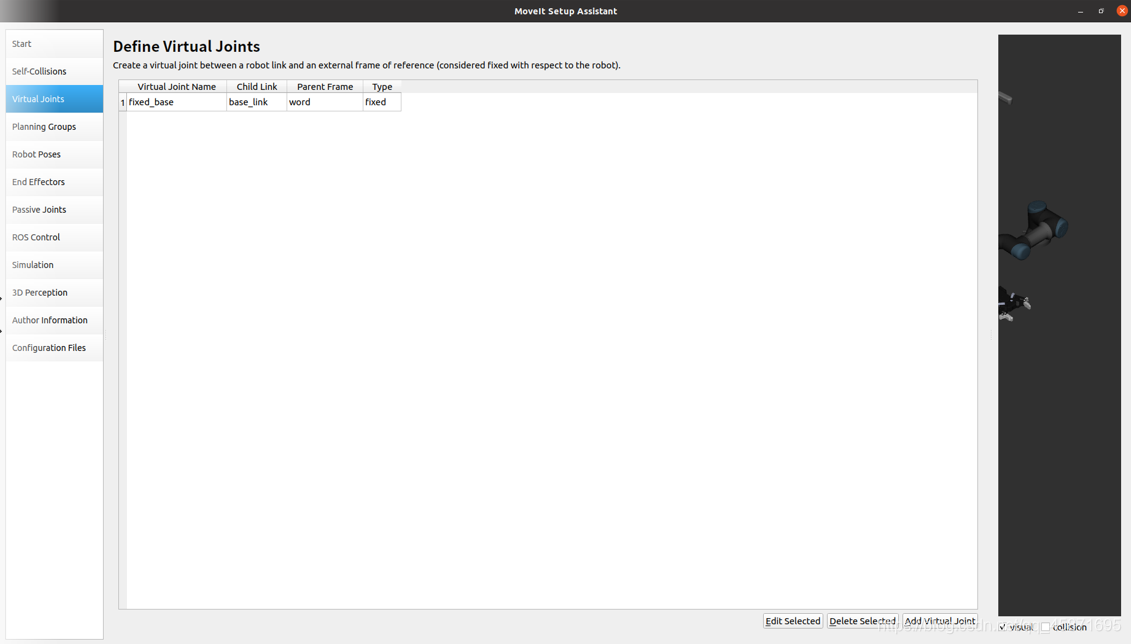
6.Define Virtual Joints
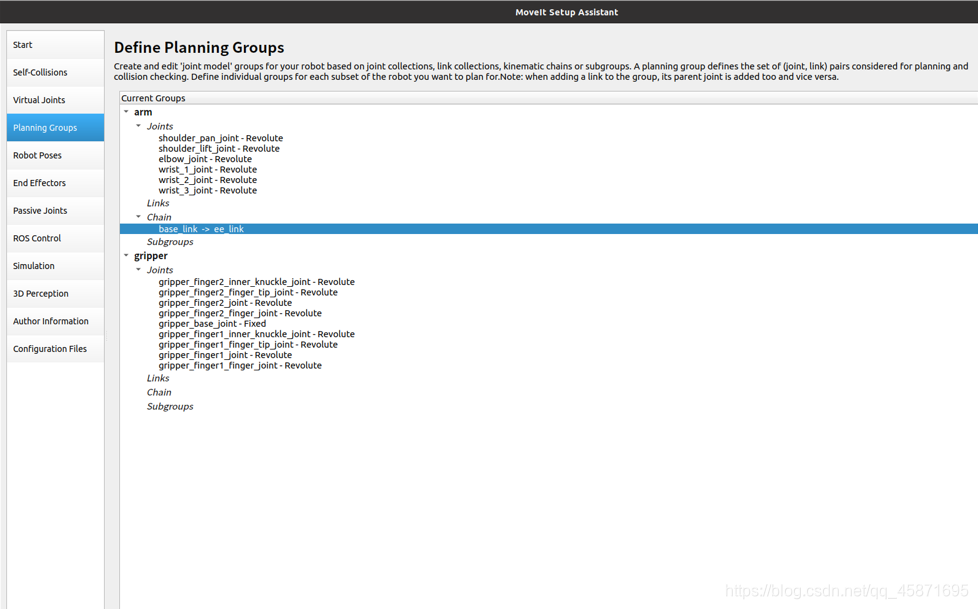
7.添加Define Planning Groups
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2335
2335











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









