



本文共计1500字,阅读完成预计5分钟
在开启系列文章讲解前,请允许笔者分享一个非常重要的工科学习方法。

工科是基础理论结合生产实践所积累的经验技术而发展起来的学科。工科的最终目的是用于实践,通过实践来改变世界,造福世界和人类。在《实践论》中,教员认为应在实践的基础上获得感性认识,由感性认识上升到理性认识,再由理性认识回到实践中。即认识改造世界应该是基于实践→认识→再实践的顺序;反观我们从小学到大学,大部分接受的教育都是先认识,学习理论;然后在根据理论进行实践。所以希望大家在接下来的学习生涯中,可以先尝试一些案例,对一些原理型的知识可以“不求甚解”,先尝试记住,慢慢形成感性认识,再学习理论形成理性认知,整体遵循实践→认识→再实践→再认识→再实践...的过程。

首先系列第一篇文章介绍固定翼相关基础知识:1、固定翼飞行器的基本组成;2、固定翼飞行器飞行控制原理。
1.固定翼飞行器的基本组成
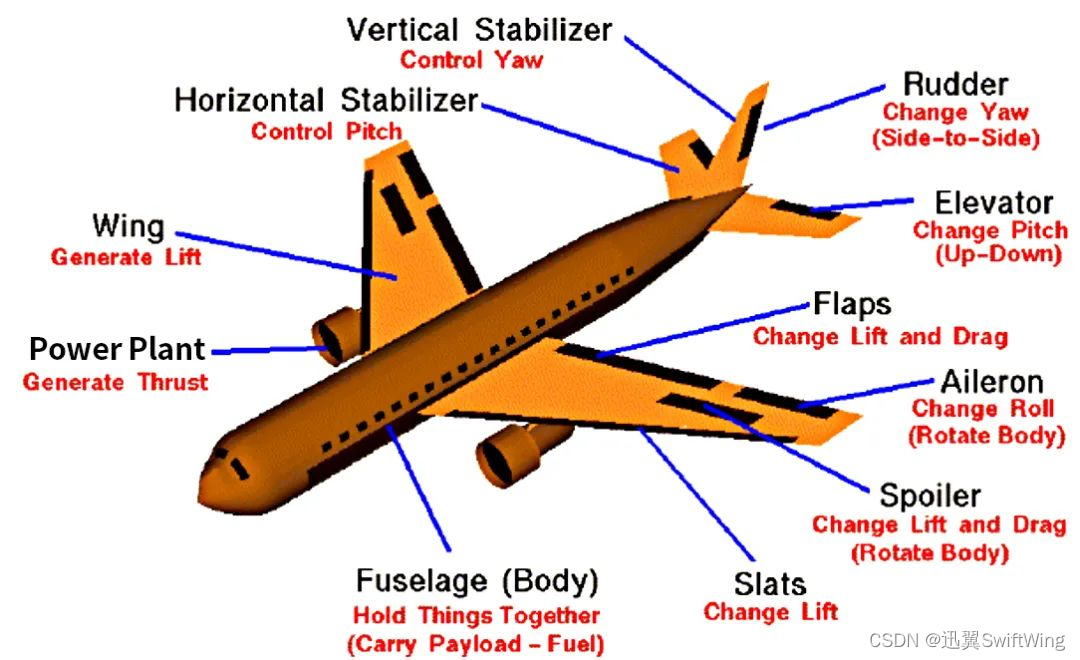
常规布局的固定翼飞行器基本组成可以分为机身、机翼、水平尾翼、垂直尾翼、动力系统。
-
机身(Fuselage)作为飞行器的载体,连接各个部件及翼面,也承担着装载各部分载荷的功能
-
机翼(Wing)主要负责提供维持飞行器飞行的升力。机翼上可以操纵发生偏转的部分叫做舵面,操纵飞机发生滚转的舵面叫做副翼(Aileron),部分飞机可能有额外的用于增升的后缘襟翼(Flap)或前缘缝翼(Slat),用于减速增阻的扰流板(Spoiler)。
-
水平尾翼(平尾、水平安定面、Horizontal Stabilizer)和垂直尾翼(垂尾、垂直安定面、Vertical Stabilizer)分别负责控制飞行的俯仰稳定性、航向稳定性。平尾上的操纵舵面称为升降舵(Elevator),负责控制飞行器的俯仰;垂尾上的操纵舵面称为方向舵(Rudder),负责控制飞行器的偏航。
-
动力系统(Power Plant)主要提供飞行器飞行动力,对于无人机的动力系统而言,主要由电机或油机驱动螺旋桨旋转提供拉力,必要时在电机或油机与螺旋桨之间存在齿轮组进行转速、效率转换。
2、固定翼飞行器飞行控制原理
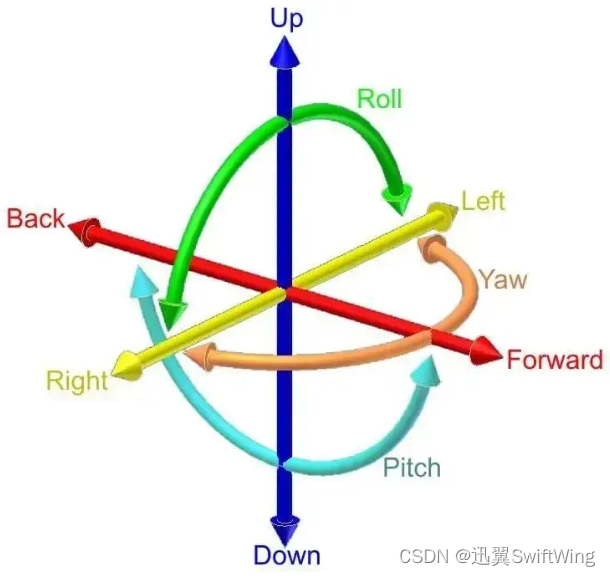
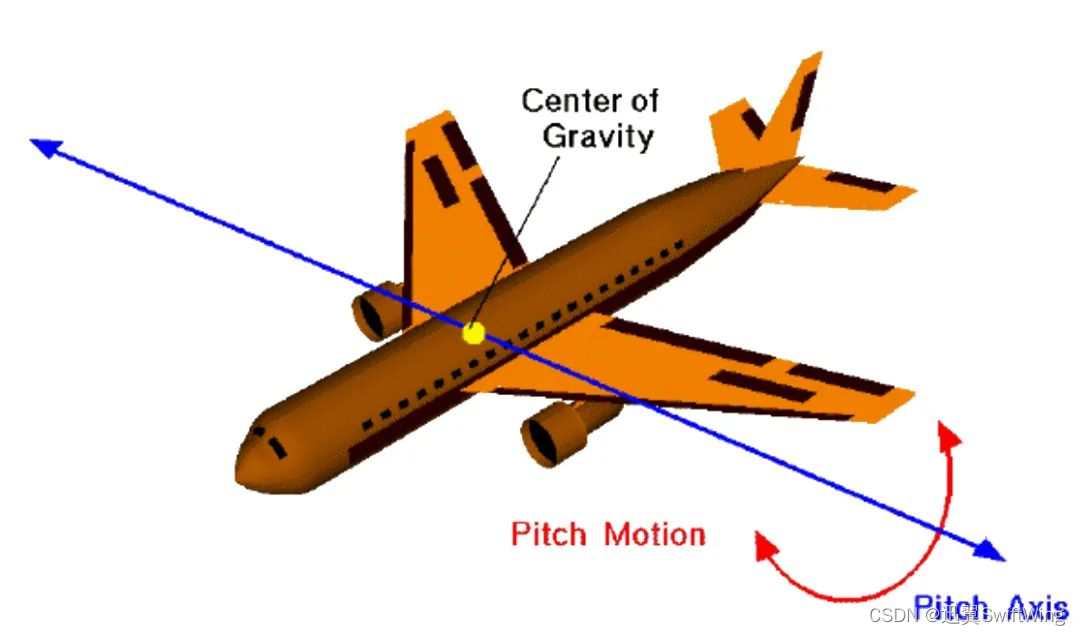
学习飞行原理需要先明确飞行的自由度。飞行器在三维空间的一共有6个运动自由度(6DOF),分别为平行于x,y,z轴的平动(前后、左右、上下)和绕x,y,z轴的转动(滚转Roll、俯仰Pitch、偏航Yaw)。这六个自由度方向上的运动构成了飞行器在三维空间的运动。
固定翼飞行器飞行控制输入为T, δa, δe, δr。(δ代表舵面偏转,下标a代表aileron副翼,e代表elevator升降舵,r代表rudder方向舵)
T:推力;为飞机轴向提供推力。
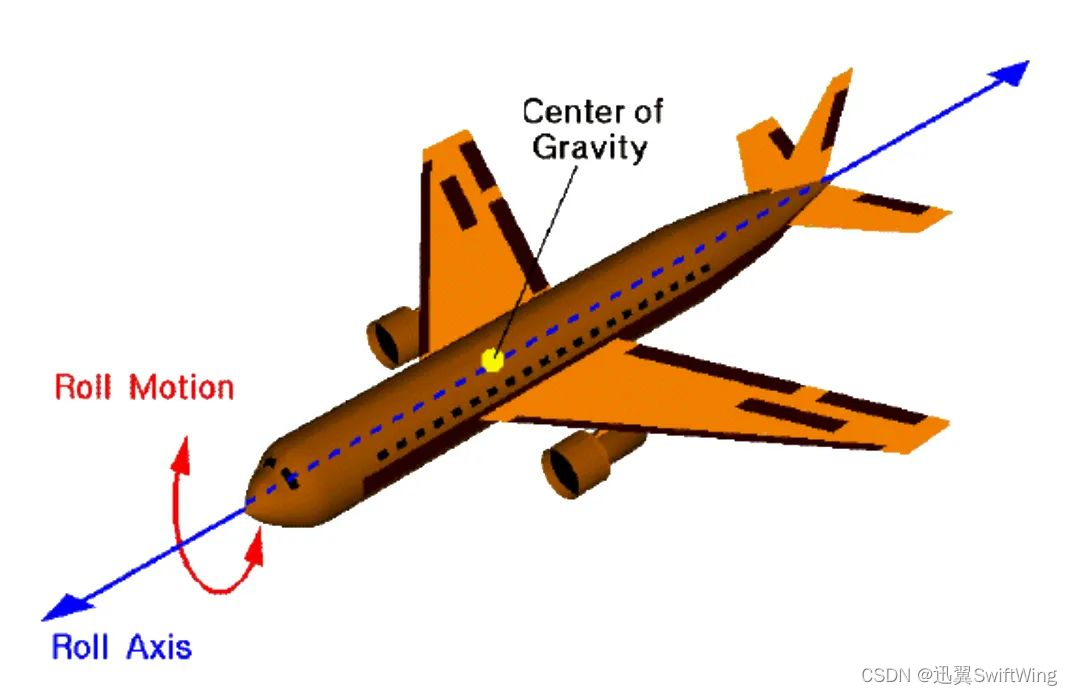
δa:副翼舵偏;副翼舵面产生偏转后,左右机翼升力不一致,从而产生滚转力矩,使得飞行器产生滚转。
δe:升降舵偏;升降舵面产生偏转后,水平尾翼升力产生变化,俯仰方向的力矩平衡被打破从而使得飞行器产生俯仰变化。
δr:方向舵偏;方向舵面产生偏转后,垂直尾翼产生侧向气动力,垂尾的侧向力对飞行器产生偏航力矩,使得飞行器发生偏航。


区别于四旋翼飞行器可以在空间中上下前后左右平移, 固定翼飞行器仅能通过舵面偏转控制姿态,在控制姿态的基础上控制飞行朝向,实现三维空间中的飞行,这也是固定翼飞行器相较于旋翼飞行器的控制难点所在。因此固定翼飞行器的飞行控制一般划分为上层的规划控制和底层控制。规划控制负责规划出飞行航迹,并根据航迹生成姿态控制指令或速度、加速度控制指令;这些控制指令由底层控制器接收,最终计算出各舵面的偏转值。
3.总结预告
本文简单介绍了固定翼结构基本组成以及基本飞行控制,内容不多且相对简单,主要是为了之后讲解打下基础,希望大家能够对固定翼飞行器有一个基本的认知。接下来的文章将会开始讲解固定翼飞行器的气动模型,运动学模型,以及一些仿真分析算例。如有兴趣,可以加查看评论区。
END
迅翼SwiftWing致力于固定翼技术共享,汇聚固定翼领域技术极客,推动固定翼技术持续创新!

















 4182
4182

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









