







上期我们讲述了双回路姿态控制器的设计方式,但是留下来了两个问题。
- 第一个问题是为什么采用协调转弯公式计算偏航角速率期望值 ψ ˙ s p \dot{\psi}_{sp} ψ˙sp;
- 第二个问题是空速缩放为什么 P I PI PI控制项的缩放系数 P I S c a l e r PI_{Scaler} PIScaler是平方比例计算,而 F F FF FF前馈项的缩放系数 F F S c a l e r FF_{Scaler} FFScaler计算是线性比例计算?
1. 为什么需要协调转弯?
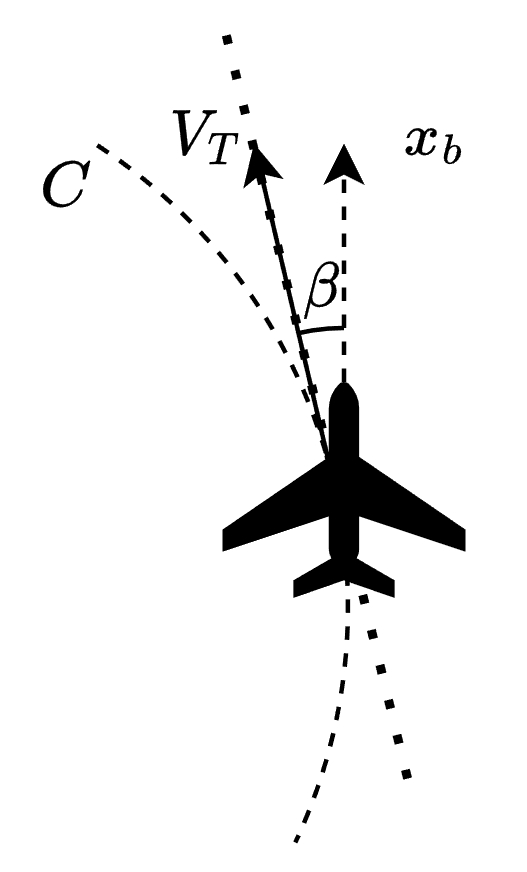
侧滑角是机体系下的 x b x_b xb轴朝向与空速方向 V T V_T VT的夹角。
无风环境下,当飞行器沿着路径 C C C进行转弯时,机头朝向与飞行器飞行方向(飞行器在路径 C C C处的切线方向)之间存在的夹角为侧滑角。
当飞行存在侧滑角时,会有以下缺点:
- 由于空速方向与机体纵轴不重合,会导致额外较大的阻力;
- 机头朝向与飞行方向不一致,会引起乘坐不适;
- 侧滑不利于飞机的操控和机动性;
- 侧滑会导致机翼两侧受力不均匀,长期的侧滑会使飞机承受额外的应力,导致结构疲劳。
为了克服侧滑角的影响,需要实现协调转弯,控制机头朝向与速度方向一致。
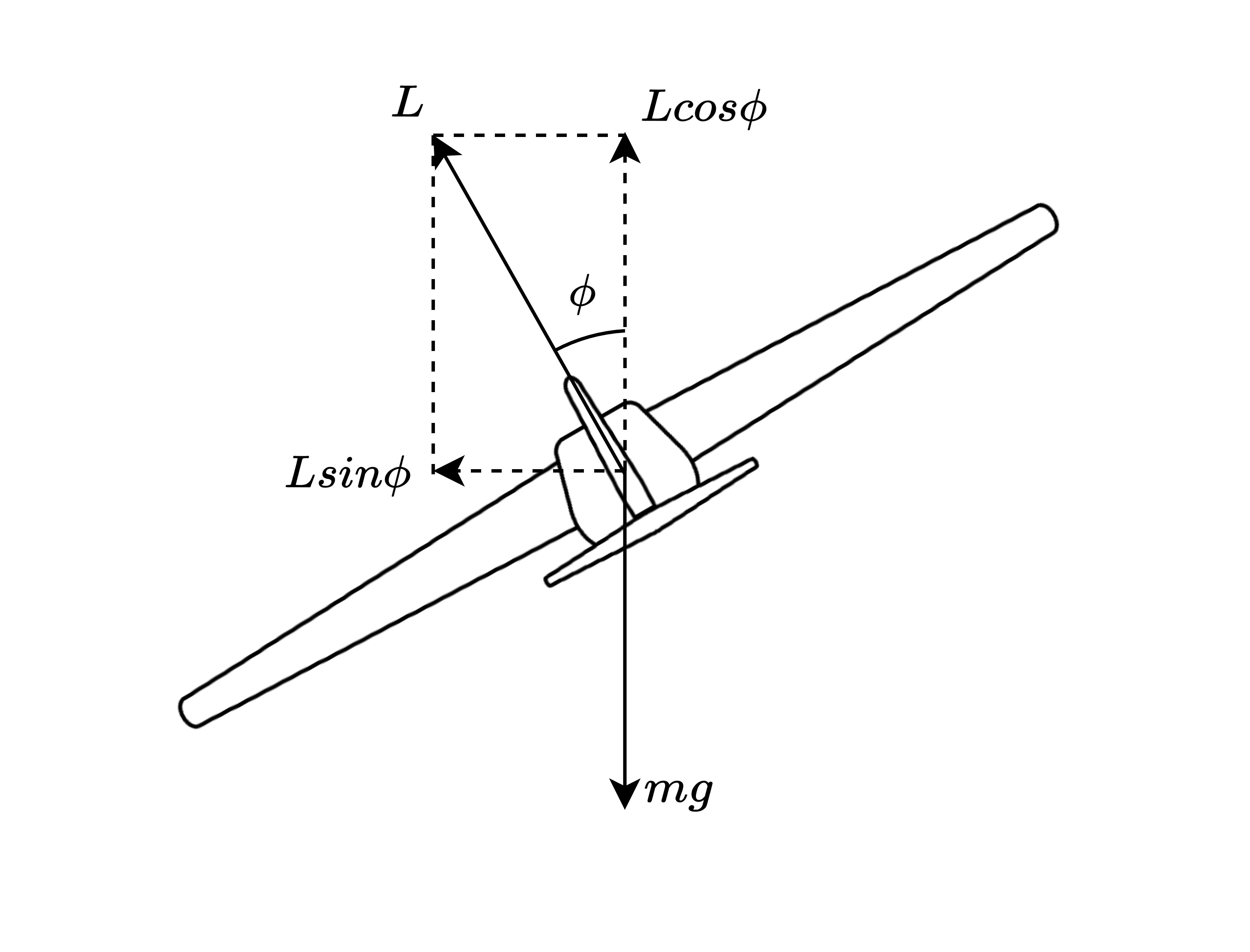
我们先来看协调转弯下的受力分析图。升力为 L L L,升力的垂直分量为 L c o s ϕ Lcos\phi Lcosϕ,升力的水平分量为 L s i n ϕ Lsin\phi Lsinϕ。假设在等高度进行协调转弯,不难得出如下方程组:
{ m g = L c o s ϕ m a y = L s i n ϕ a y = V ψ ˙ \begin{cases}mg=Lcos\phi \\ma_y=Lsin\phi \\a_y = V \dot{\psi} \end{cases} ⎩
⎨
⎧mg=Lcosϕmay=Lsinϕay=Vψ˙
式中, a y a_y ay为转弯向心加速度, L L L为升力, V V V为空速。
求解改方程组可得协调转弯公式:
ψ ˙ = g V t a n ϕ \dot{\psi}=\frac{g}{V}tan\phi ψ˙=Vgtanϕ
若不在等高度下(匀速爬升)进行协调转弯,同样的受力分析如下图:
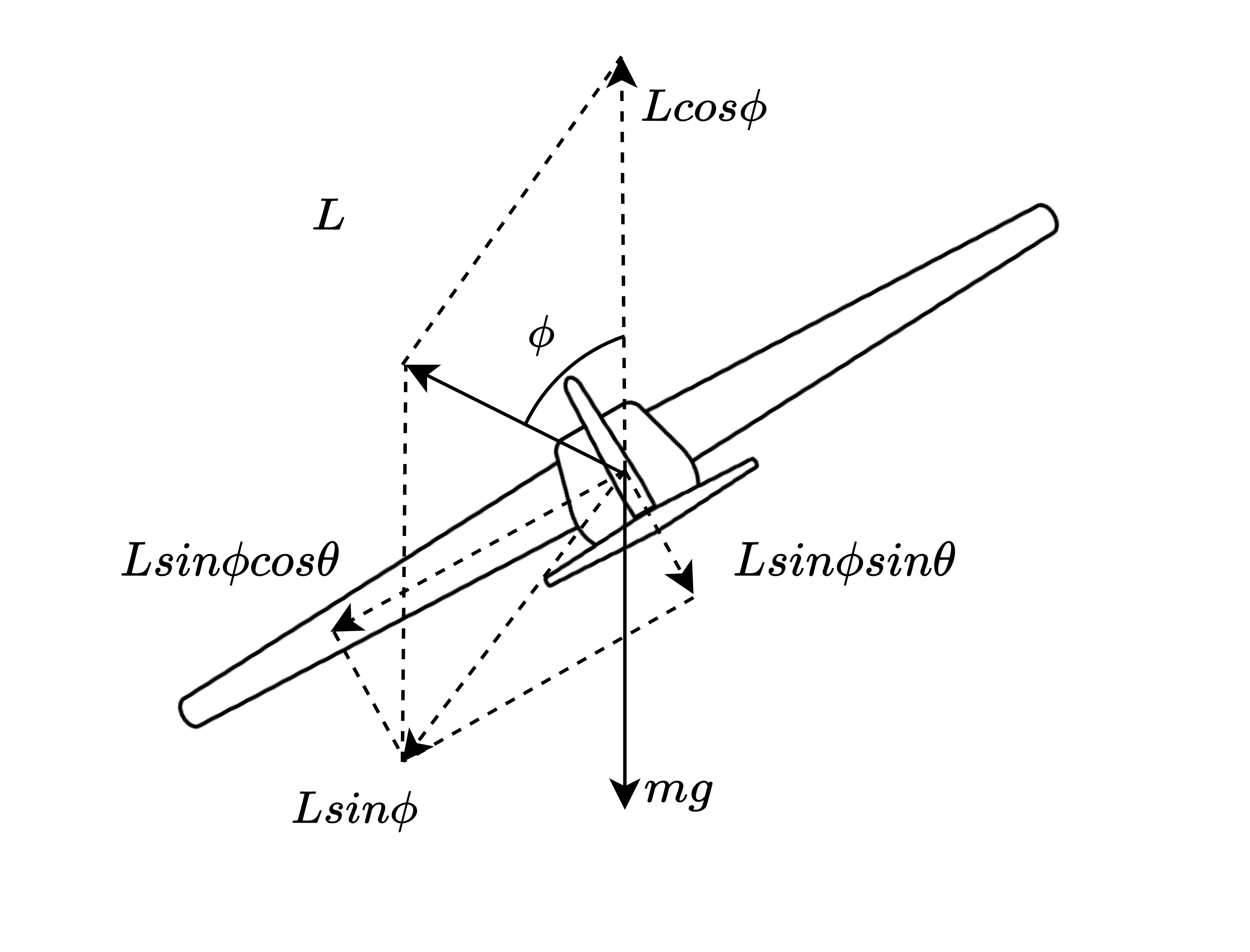
联立方程组:
{ m g = L c o s ϕ m a y = L s i n ϕ c o s θ a y =
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5606
5606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









