







本课题的研究内容
本研究的目的是对现有的垃圾收集处理系统进行改进,该系统仍然依靠人工,需要经过中转站,以改善工作环境,提高垃圾收集效率,消除垃圾再污染,降低人工劳动率。开发的侧装式垃圾收集器融合了以往垃圾车的优点。它具有有效、安全地收集垃圾的能力。通过控制软件可以很好地完成自动抓取、抓取、收回、提升、抛出等操作行为,以及垃圾倾倒和垃圾桶复位。垃圾收集车操纵器作为垃圾收集车的一个组成部分,合适替代人工,轻松处理环卫工人在垃圾收集和运输中的过错和缺点。我利用本科期间积累的机械设计能力,以及整理和阅读相关文献资料,自行进行了搬运机器人的结构设计和运动仿真。以下是主要的设计任务。
1.确定机械手的基本形式。
按照机构自由度的类型大致分为以下几种类型。在考虑到不同的考虑因素和被处理对象的形状特性后,最终选择圆柱坐标型机械手来进行搬运。确定选择圆柱坐标机械手后,搬运机械手的四个自由度的配置:手的开合、臂的旋转、提升和拉伸。
2.选择机械手各部分的驱动方式。
驱动系统是为搬运机器人提供驱动力的重要装置,根据驱动方式的不同,可以分为液压驱动、气动驱动、电机驱动、机械传动。
1.液压驱动:输出力矩大,冲击小,易实现连续轨迹控制,应用范围广。
2.气动驱动:输出力矩小,冲击严重,定位不精确,易控制,成本低。
综合上述分析,结合工作任务的要求,本次搬运机器人设计采用电液混合驱动。
机械手工作原理
垃圾收集车机械手自动收集垃圾的整个工作流程可以粗略地分为以下几个步骤:夹持容器、提升、回缩、翻转、倾倒、放桶、复位,每个操作都由液压缸和电机控制。
1)垃圾桶和端握得相对位置是任意的。在Y、Z两个方向上,升降液压缸的活塞和支柱的伸长量可以忽略不计,保证了整个机械臂、垃圾车和垃圾桶的运动都在一定范围内。
2)抓桶时,滑枕沿+Z方向拉伸一定的距离,然后在提升液压缸活塞的运动下,提升臂沿-Y方向移动一定的距离,使机械手的末端抓斗接近垃圾桶。在此阶段,翻转臂不做任何动作。最后,机械手末端的抓手通过爪式液压缸带动小齿轮和齿条机构,使左、右抓手合拢,夹住垃圾桶,抓手的位置是整个垃圾桶高度的三分之二。
3)升降和滑枕回缩,整个机械手带着垃圾桶沿+Y路径行走,提升液压缸的初始位置,滑枕沿Z轴回缩至固定座400mm上,将垃圾从地面上呈现出来,并保证了垃圾桶、机械臂与垃圾车车身的碰撞、碰触等,对垃圾桶有有利条件。
4)翻转过程中,爪式液压缸和升降液压缸不旋转,只有转动臂绕X轴旋转。旋转的液压缸控制旋转角度和角速度,最大旋转角度为135度。
5)当翻转臂旋转到最大角度135度时,倾倒过程开始。特别设置了2秒的保温时间,确保桶内垃圾满载到达垃圾车而不溢出。
6)垃圾桶复位后,垃圾已被扔掉,可先将机械臂沿X轴旋转到水平位置,然后沿+Z轴方向伸出整个机械臂一定距离,沿Y轴方向,再提高液压缸活塞长度,用于垃圾桶与大地的接触。夹持器的传动齿轮和齿条放松,垃圾桶的夹持动作放松,垃圾桶复位。升降液压缸的活塞在+Y轴上全部缩回,垃圾桶复位后回到零膨胀位置。沿Z轴,滑块全部缩回,并与机架对齐;夹持物体的爪状结构完全打开,底部隐藏。
液压源系统的设计
液压作为动力的来源,需要保证动力充足且无杂质,通过节流阀实现速度调节,同时让多余的油返回收集起来,整个过程都是为了保证油压的稳定。容积速度控制机构采用变量泵输油,安全阀调节系统的最大压力。
所以本次设计采用溢流阀来控制油压,同时为了防止油的污染增加一个过滤器,减少杂质对泵体的伤害。
绘制液压系统图
图3.1是机械手的液压装置示意图。垂直臂上升和下降、水平伸缩油缸/伸缩、执行爪夹紧和打开是三个执行器。动力和调节压力分别由异步电机和溢流阀构成。
由于手爪的工作需要柔和地抓取和快速地释放,所以该机采用了两个单向节流阀,节流影响不同。当5DT电源打开时,工作流体通过节气门V5进入柱塞缸; 当6DT电源关闭时,工作液会进入柱塞缸以引起快速释放。另外,由于机械手垂直油缸的重力下降方向与工作时的载荷方向一致,运动速度呈下降趋势,为了使运动运行平稳,同时力图将冲击、振动降到最低。V2平衡回路可以增加由油阻力T形成的下腔静脉的背压,以平衡重力载荷并确保安全。
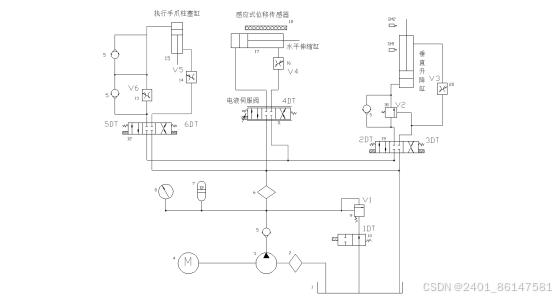
图3.1 机械手的液压系统原理图
PLC外部接线设计
为了满足液压缸伺服定位阶段的武器控制要求,采用西门子PLC(CPU224)SIMATICS7-200,考虑到位移传感器和伺服放大器的工作应用
于模拟,再结合模拟输出模块EM232,鉴于伺服放大器和位移传感器的输入规格。图4.5显示了PLC模拟量-10 v+10 v输入输出的输入输出点和触点。
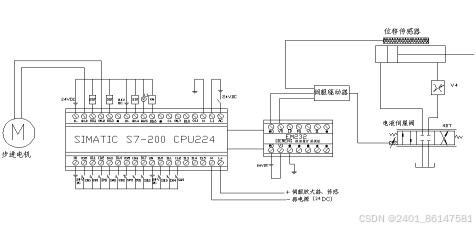
图4.5 PLC硬件接线图
I/O地址分配
表4-1 PLC输入元件地址分配明细表
控 制 元 件 符 号 编程
地址 备注
总停开关 SB0 I0.0 按下停止工作
启动开关 SB1 I0.1 按下开始工作
垂直缸上限行程开关 SM1 I0.2
垂直缸下限行程开关 SM2 I0.3
机床上下料命令开关 SB2 I0.4
检测料架有无工件光电开关 SP0 I0.5 常闭开关,闭合表示有工件
控制面板上/下选择开关 SQ1 I0.6 用于手动调整时
控制面板夹紧/松开选择开关 SQ2 I0.7 用于手动调整时
控制面板顺/逆选择开关 SQ3 I1.0 用于手动调整时
控制面板手动工作选择开关 SQ4 I1.1 用于手动调整时
控制面板自动工作选择开关 SQ5 I1.2
表4-2 PLC输出元件地址分配明细表
控 制 元 件 符 号 编程地址 备注
步进电机高速驱动脉冲输出 / Q0.0
步进电机方向控制 / Q0.2 Q0.2为1顺时针,反之为逆时针;
垂直缸上升动作电磁阀 2DT Q0.1
垂直缸下降动作电磁阀 3DT Q0.3
手爪张开动作电磁阀 5DT Q0.4
机械手原点状态指示灯 L1 Q0.5 显示原点位置
中断强制关机开关 KM Q0.6 用于中断控制
机械手控制主程序流程图
机械手控制主程序流程图如图4.6所示:
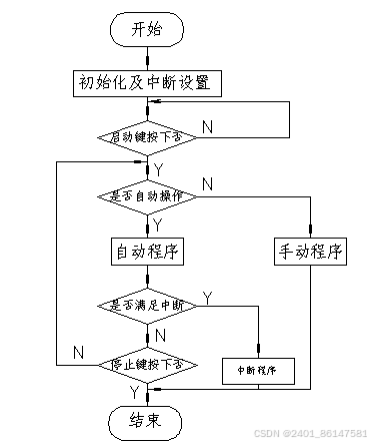
图4.6 机械手控制主程序流程图
机械手控制程序设计
采用西门子S7-200PLC编程软件STEP7-Micro/WIN32进行机械手控制系统软件的开发,通过编程提供基本的控制程序梯形图,然后进行编译和调试。
结论
本设计的是液压传动系统机械手,创新点在于选择了关节型的结构设计,相对于其他形式的结构,自由度更多,能完更复杂的动作。同时,与传统机械手相比,控制程序可调,因此适用范围更广。主要使用PLC控制液压缸带动机械手完成垃圾桶的装卸工作及其PLC控制系统的设计与实现方法,该方法提高了液压机械手的开发效率及其控制,增强了机械手的可扩展性和便携性,为复杂液压机械手的设计和开发提供了参考。该机械手采用PLC控制,具有可靠性高,程序变更灵活的优点。 无论是时间控制,行程控制还是混合控制,都可以通过设置PLC程序来实现。 可以根据机械手的动作顺序修改程序,使机械手更通用,实现机电一体化控制。
本设计垃圾车机械手结构架构显著提高了垃圾处理工作性能,无论是手动操作还是自动操作,都能提高机器的容错率,防止手动模式下自动系统故障。设备布置基本,管理方便,非常适合大范围推广使用。

















 8385
8385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









