






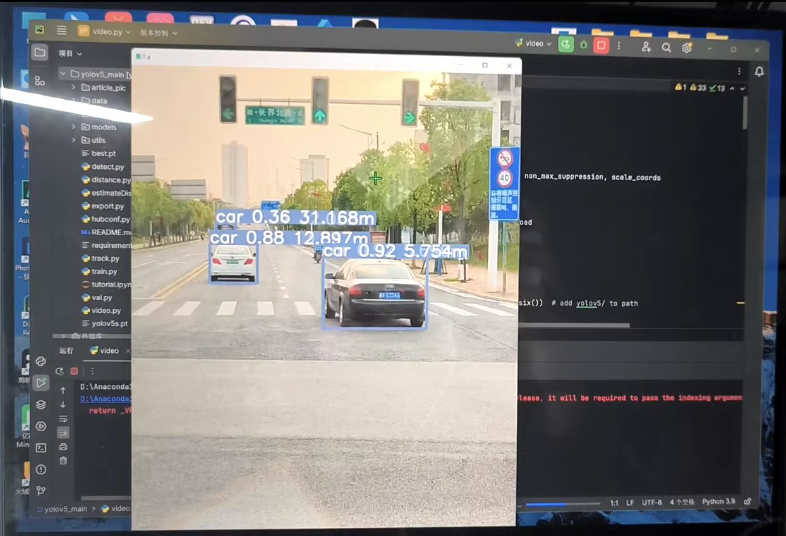
深度学习目标检测算法 通过训练大量的带有深度信息的数据来训练 估计模型 构建基于深度学习Yolov5的单目测距检测识别
yolo单目测距

1
1

构建一个基于YOLOv5的单目测距系统是一个涉及目标检测、深度估计和距离计算等多个步骤的过程。以下是一个详细的指南,包括环境搭建、模型训练、距离计算以及使用Python实现整个系统的代码示例。
1. 环境搭建
首先,确保你的开发环境已经安装了必要的库和工具。这里以Anaconda和PyTorch为例。
安装依赖
# 创建并激活虚拟环境
conda create -n yolov5 python=3.8
conda activate yolov5
# 安装PyTorch和YOLOv5
pip install torch torchvision torchaudio --extra-index-url https://download.pytorch.org/whl/cu113
git clone https://github.com/ultralytics/yolov5.git
cd yolov5
pip install -r requirements.txt
2. 数据准备
收集和标注数据集,用于训练YOLOv5模型进行目标检测。同时,需要一些带有深度信息的数据来训练深度估计模型。
数据预处理
对数据进行预处理,包括裁剪、缩放、归一化等操作,以便于模型训练。
import cv2
import numpy as np
def preprocess_image(image):
# 裁剪和缩放
image = cv2.resize(image, (640, 480))
# 归一化
image = image / 255.0
return image
3. 模型训练
YOLOv5模型训练
使用YOLOv5进行目标检测模型训练。
# 训练YOLOv5模型
python train.py --img 640 --batch 16 --epochs 100 --data coco128.yaml --weights yolov5s.pt
深度估计模型训练
选择一个适合深度估计的深度学习模型,如DepthNet或DORN等。这里以DepthNet为例。
import torch
import torch.nn as nn
import torch.optim as optim
class DepthNet(nn.Module):
def __init__(self):
super(DepthNet, self).__init__()
# Encoder
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(64, 128, kernel_size=3, padding=1)
self.conv3 = nn.Conv2d(128, 256, kernel_size=3, padding=1)
# Decoder
self.upconv3 = nn.ConvTranspose2d(256, 128, kernel_size=2, stride=2)
self.conv4 = nn.Conv2d(256, 128, kernel_size=3, padding=1)
self.upconv2 = nn.ConvTranspose2d(128, 64, kernel_size=2, stride=2)
self.conv5 = nn.Conv2d(128, 64, kernel_size=3, padding=1)
self.conv6 = nn.Conv2d(64, 1, kernel_size=1)
def forward(self, x):
# Encoder
x1 = F.relu(self.conv1(x))
x2 = F.max_pool2d(F.relu(self.conv2(x1)), 2)
x3 = F.max_pool2d(F.relu(self.conv3(x2)), 2)
# Decoder
x = F.relu(self.upconv3(x3))
x = torch.cat((x2, x), dim=1)
x = F.relu(self.conv4(x))
x = F.relu(self.upconv2(x))
x = torch.cat((x1, x), dim=1)
x = F.relu(self.conv5(x))
x = self.conv6(x)
return x
# 初始化模型和优化器
model = DepthNet()
optimizer = optim.Adam(model.parameters(), lr=0.001)
# 定义损失函数
criterion = nn.MSELoss()
# 训练循环
for epoch in range(num_epochs):
for images, depths in dataloader:
optimizer.zero_grad()
outputs = model(images)
loss = criterion(outputs, depths)
loss.backward()
optimizer.step()
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item()}')
4. 距离计算
在完成模型训练后,可以使用训练好的模型进行目标检测和深度估计,并计算目标的距离。
def calculate_distance(depth_map, bbox):
x_min, y_min, x_max, y_max = bbox
depth_values = depth_map[y_min:y_max, x_min:x_max]
average_depth = np.mean(depth_values)
# 假设相机焦距为f,图像中心点到物体的水平距离为d
f = 500 # 相机焦距
d = average_depth * f
return d
# 使用YOLOv5进行目标检测
from yolov5.models.experimental import attempt_load
from yolov5.utils.datasets import LoadImages
from yolov5.utils.general import non_max_suppression
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = attempt_load('yolov5s.pt', map_location=device)
dataset = LoadImages('test_image.jpg')
for path, img, im0s, vid_cap in dataset:
img = torch.from_numpy(img).to(device)
img = img.float() / 255.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
pred = model(img, augment=False)[0]
pred = non_max_suppression(pred, conf_thres=0.25, iou_thres=0.45)
for det in pred:
if len(det):
for *xyxy, conf, cls in reversed(det):
bbox = [int(x) for x in xyxy]
# 使用深度估计模型计算深度图
depth_map = depth_model(preprocess_image(im0s)).squeeze().detach().cpu().numpy()
# 计算目标距离
distance = calculate_distance(depth_map, bbox)
print(f'Distance to object: {distance} meters')
5. 用户界面设计
使用PyQt5等库设计一个图形用户界面(GUI)。
from PyQt5.QtWidgets import QApplication, QMainWindow, QPushButton, QLabel, QVBoxLayout, QWidget, QFileDialog
from PyQt5.QtGui import QImage, QPixmap
from PyQt5.QtCore import QTimer
import sys
class DistanceMeasurementApp(QMainWindow):
def __init__(self):
super().__init__()
self.setWindowTitle("Yolo v5 单目测距系统")
self.setGeometry(100, 100, 800, 600)
self.label = QLabel(self)
self.label.setGeometry(10, 10, 640, 480)
self.open_button = QPushButton('打开图片', self)
self.open_button.move(10, 490)
self.open_button.clicked.connect(self.open_image)
self.measure_button = QPushButton('开始测距', self)
self.measure_button.move(170, 490)
self.measure_button.clicked.connect(self.measure_distance)
def open_image(self):
options = QFileDialog.Options()
file_name, _ = QFileDialog.getOpenFileName(self, "QFileDialog.getOpenFileName()", "", "Images (*.png *.xpm *.jpg *.bmp);;All Files (*)", options=options)
if file_name:
self.image_path = file_name
self.display_image(file_name)
def display_image(self, file_name):
image = QImage(file_name)
pixmap = QPixmap.fromImage(image)
self.label.setPixmap(pixmap)
def measure_distance(self):
if hasattr(self, 'image_path'):
image = cv2.imread(self.image_path)
results = detect_objects_and_measure_distance(image, model, depth_model)
for result in results:
label, bbox, distance = result
x_min, y_min, x_max, y_max = bbox
cv2.rectangle(image, (x_min, y_min), (x_max, y_max), (0, 255, 0), 2)
cv2.putText(image, f'{label}: {distance:.2f} m', (x_min, y_min - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
height, width, channel = image.shape
bytes_per_line = 3 * width
q_img = QImage(image.data, width, height, bytes_per_line, QImage.Format_RGB888)
pixmap = QPixmap.fromImage(q_img)
self.label.setPixmap(pixmap)
if __name__ == '__main__':
app = QApplication(sys.argv)
window = DistanceMeasurementApp()
window.show()
sys.exit(app.exec_())
以上就是构建一个基于YOLOv5的单目测距系统的详细步骤和关键代码示例。


















 645
645

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









