







一 、现场踏勘
该步骤主要对虚拟测区内高层建筑、起飞场地、禁飞区等进行踏勘。
(1)按快捷键【M】或点击功能中心,可打开大地图查看任务测区:

(2)通过人物行走或一键传输功能找出飞行区域内有无禁飞区,确认飞行安全范围,禁飞区牌子圈起的范围则为禁飞区范围;

(3)天气情况选择,选择晴天飞行,白天飞行(8点至18点),风速小于等于5级风;
(4)飞行范围内的高度踏勘,通过无人机飞行至高处,查看地面站内的相对高度得知飞行安全高度(无人机高度踏勘需正确安装无人机)。

二 、像控布设
根据精度要求及现场情况设计像控布设方案,并在虚拟场景中实施。本次竞赛 采用特征点像控布设方案与标靶像控点方案共同布设。
(1)按【TAB】键或打开工具箱,取出移动站;

(2)移动站连接:移动站开机 →按【F1】取出手簿→点击【配置】 →点击【仪器连接】 →点击【扫描】 →选择蓝牙编号→点击【连接】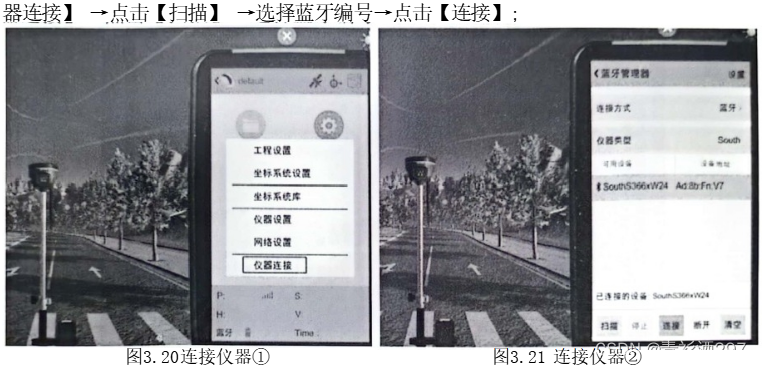
(3)移动站配置:点击【仪器设置】 → 点击【移动站设置】 →输入密码(可随意输入)→点击【确定】 →选中新建的账号→点击【连接】;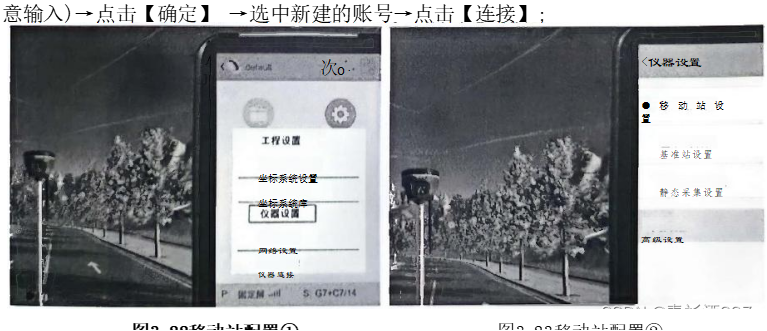
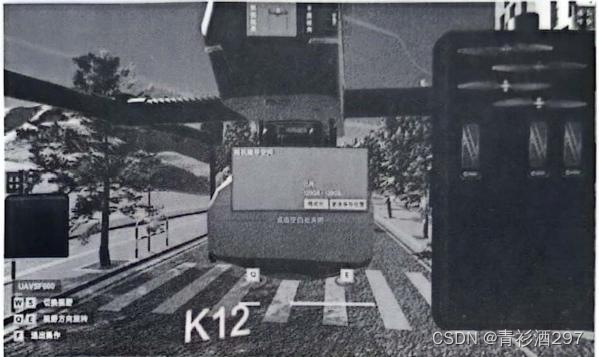
(4)校正向导:点击【输入】选择【校正向导】 →选择【基准站架设在未知点】后点击【下一步】 → 点击【点库获取】(如点库没有点可在大地图一键导入) → 选择控制点K12→ 输入杆高1.8 → 移动站放置K12 控制点上→点击【校正】: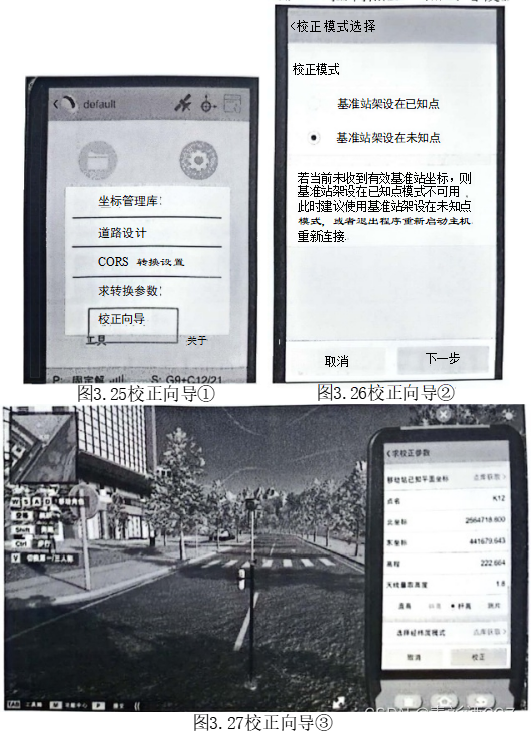
(5)特征点像控布设:特征像控点采集可选择较为尖锐的标志物、标志物应与地表颜色形成鲜明对比,例如斑马线拐点、地砖拐点;
(6)标靶像控布设:标靶像控点应选择较为平整的地面
(7)标靶像控点测量:移动站放置标靶纸颜色分明处,取出手簿进行控制点测量;
(8)点之记:可使用相机对像控点进行拍照记录。操作方式:背包取出佳能相机 → 按【Q】拍照 → 点击SD 卡处进行照片输出;
(9)像控点数据导出:打开手簿 → 点击【工程】点击【文件导入导出】 → 点击【成果文件导出】 →文件类型选择【自定义文件类型.Txt】→ 点击【确定】。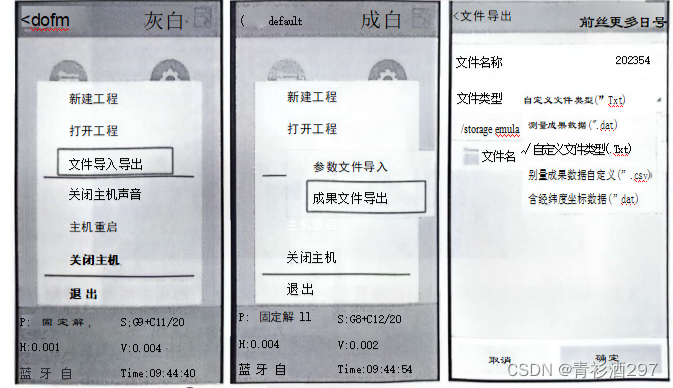
三、设备组装
根据安全的组装步骤进行无人机的组装与校正。
(1)背包取出 SF600 无人机 →视角对着无人机按【F】进入组装操作 → 点击电池电源键进行电量检查→选择满电的电池安装→开机;
(2)背包取出H12 遥控器→按【Y】开机→【F2】可全屏显示→点击【开始 连接】 →选择无人机编号进行连接→点击【设备固件】 →点击【指南针校准】 →点 击【校准】 →点击【加速计校准】 →点击【开始校准】 →点击【下一步】 →校准完成;
(3)关闭无人机电源 → 安装相机 → 按【Q】旋转视角 → 点击相机处 tepyc 接口 → 点击【格式化】 → 点击【更改保存位置】 → 新建文件夹后选择文件夹;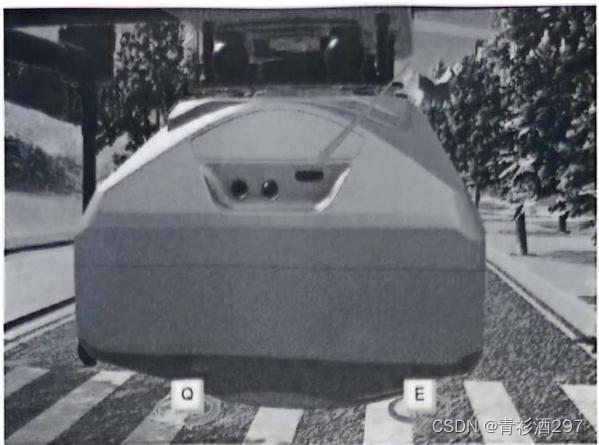
(4)安装桨叶,按照黑对黑、红对红的方式进行安装,安装完成电源开机;
(5)无人机重新开机,与遥控器进行连接,连接后进行相机手动拍照。
四、航线规划
根据给定的测区范围、分辨率等要求在虚拟地面站中进行航线规划,并对虚 测区进行航飞数据采集。
(1)在地面站点击【航线规划】 → 点击【摄影测量】 → 点击【新建航线】 - 制测区 →设置飞行高度 →设置重叠率 →设置航线角度 →设置航线外扩(大于等于行高度)→点击【保存航线】 →点击【确定】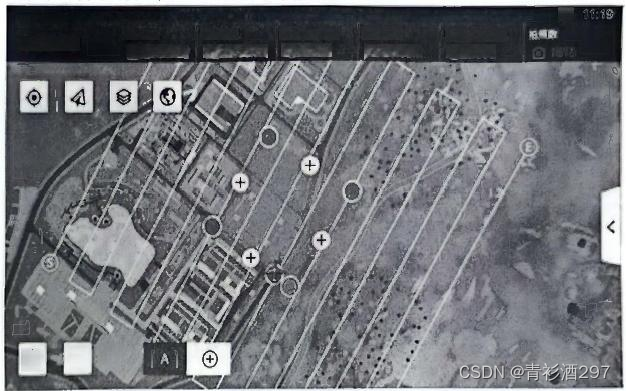
(2)进入飞行管理界面 →设置返航高度(至少比飞行高度大10米) → 点击任务按钮 → 选择任务 → 点击执行 → 点击自动;

五、 飞行监控
实时监控无人机图传界面,如飞行过程中遇突发天气,需返航后切换天气重新飞行。
(1)进入图传界面;
按F2键切换视角
(2)如出现下雨天气,需点击【回家】按钮,待无人机落地后切换合适天气,选择上次飞行的航线进行断点续飞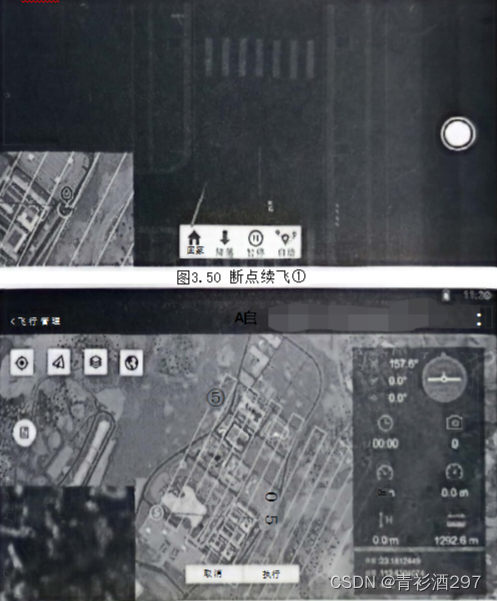
六、设备回收
作业完成后进行设备回收。
(1)移动站回收:拾起仪器按 X回收;
(2)遥控器按X 回收:
(3)无人机回收:进入无人机操作界面 →相机关机 →无人机电源关机 → 回收桨叶 → 回收电池 → 回收相机 →拾起无人机按X回收
七.提交成果
按P键,确认即可。



















 3327
3327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











