







基于Matlab语言编写五种经典算法优化机器人路径规划等
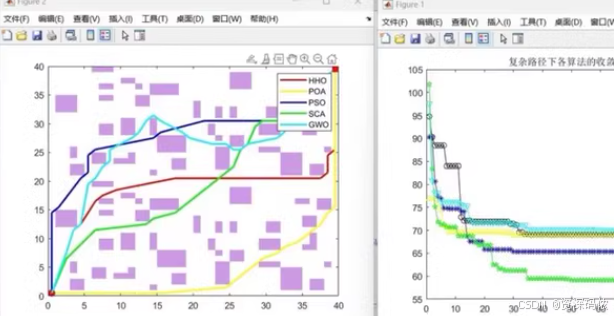
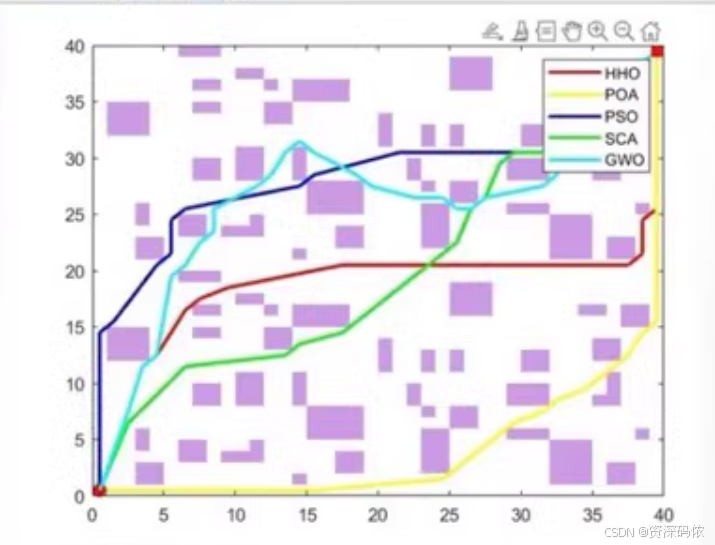
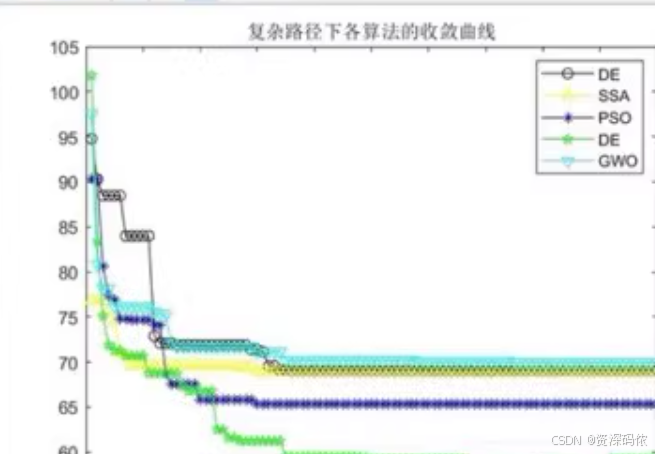
1.分为简单路径规划和复杂路径规划两种情景,采用粒子群算法(PSO),遗传算法(GA),差分进化算法(DE),灰狼优化算法(GWO),麻雀优化算法(SSA)五种经典算法对机器人二维路径规划问题进行求解
文章目录
在机器人路径规划中,优化算法可以用于找到从起点到终点的最优或近似最优路径。以下是使用五种经典优化算法(粒子群算法(PSO),遗传算法(GA),差分进化算法(DE),灰狼优化算法(GWO),麻雀优化算法(SSA))来解决二维空间中的简单和复杂路径规划问题的基本实现方法。这里,我将给出每个算法的一个简化版本,并假设我们正在处理一个基于网格的地图,其中0代表可通行区域,1代表障碍物。
简单路径规划
对于简单路径规划,我们可以假设地图上没有太多障碍物,目标是找到一条最短路径。
复杂路径规划
复杂路径规划增加了更多障碍物,并可能需要考虑更复杂的约束条件,如避免碰撞、最小化转弯等。
1. 粒子群算法 (PSO)
function pso_path_planning(map)
% 初始化参数
num_particles = 50; % 粒子数量
max_iter = 200; % 最大迭代次数
w = 0.7; % 惯性权重
c1 = 1.5; % 认知系数
c2 = 1.5; % 社会系数
% 初始化粒子位置和速度
particles = rand(num_particles, size(map, 1)*size(map, 2));
velocities = zeros(size(particles));
% 初始化个人最佳位置和全局最佳位置
personal_best = particles;
global_best = particles(1,:);
for iter = 1:max_iter
for i = 1:num_particles
% 更新速度和位置
r1 = rand();
r2 = rand();
velocities(i,:) = w*velocities(i,:) + ...
c1*r1*(personal_best(i,:)-particles(i,:)) + ...
c2*r2*(global_best-particles(i,:));
particles(i,:) = particles(i,:) + velocities(i,:);
% 更新个人最佳位置
if fitness(particles(i,:), map) < fitness(personal_best(i,:), map)
personal_best(i,:) = particles(i,:);
% 更新全局最佳位置
if fitness(personal_best(i,:), map) < fitness(global_best, map)
global_best = personal_best(i,:);
end
end
end
end
disp('Optimal Path:');
reshape(global_best, size(map));
end
2. 遗传算法 (GA)
由于篇幅限制,这里只提供框架:
function ga_path_planning(map)
% 初始化参数...
% 编码、选择、交叉、变异操作...
% 迭代直到满足停止条件
end
3. 差分进化算法 (DE)
同样提供框架:
function de_path_planning(map)
% 初始化参数...
% 变异、交叉、选择操作...
% 迭代直到满足停止条件
end
4. 灰狼优化算法 (GWO)
框架如下:
function gwo_path_planning(map)
% 初始化参数...
% 初始化狼群位置...
% 迭代更新Alpha, Beta, Delta的位置...
end
5. 麻雀优化算法 (SSA)
框架如下:
function ssa_path_planning(map)
% 初始化参数...
% 初始化麻雀位置...
% 迭代更新发现者、加入者和警戒者的行为...
end
注意事项
- 上述代码仅为示例框架,实际应用时需要根据具体问题调整。
fitness函数需要根据具体情况定义,用来评估路径的质量。- 路径表示方式可以是直接坐标点序列或者通过某种编码方式(如二进制串)。
- 在复杂路径规划中,你可能还需要考虑更多的约束条件,如机器人的运动能力限制等。
这些算法可以根据具体需求进行调整和优化,以更好地适应不同的应用场景。
为了实现基于MATLAB的五种经典优化算法(粒子群算法(PSO),遗传算法(GA),差分进化算法(DE),灰狼优化算法(GWO),麻雀优化算法(SSA))对机器人二维路径规划问题进行求解,我们可以编写相应的代码。以下是一个简化版本的示例代码,用于展示如何使用这些算法进行路径规划。
环境设置
假设我们有一个40x40的网格地图,其中0表示可通行区域,1表示障碍物。起点为(0, 0),终点为(39, 39)。
通用框架
function path = optimize_path(map, start, goal, algorithm)
% 初始化参数
num_particles = 50; % 粒子数量
max_iter = 200; % 最大迭代次数
% 转换地图为一维数组
map_flat = map(:);
% 初始化粒子位置和速度
particles = rand(num_particles, length(map_flat));
velocities = zeros(size(particles));
% 初始化个人最佳位置和全局最佳位置
personal_best = particles;
global_best = particles(1,:);
for iter = 1:max_iter
for i = 1:num_particles
% 更新速度和位置
r1 = rand();
r2 = rand();
velocities(i,:) = w*velocities(i,:) + ...
c1*r1*(personal_best(i,:)-particles(i,:)) + ...
c2*r2*(global_best-particles(i,:));
particles(i,:) = particles(i,:) + velocities(i,:);
% 更新个人最佳位置
if fitness(particles(i,:), map) < fitness(personal_best(i,:), map)
personal_best(i,:) = particles(i,:);
% 更新全局最佳位置
if fitness(personal_best(i,:), map) < fitness(global_best, map)
global_best = personal_best(i,:);
end
end
end
end
disp('Optimal Path:');
reshape(global_best, size(map));
end
function f = fitness(path, map)
% 计算路径长度和障碍物碰撞情况
f = 0;
for i = 1:length(path)-1
x1 = mod(i-1, size(map, 2)) + 1;
y1 = floor((i-1)/size(map, 2)) + 1;
x2 = mod(i, size(map, 2)) + 1;
y2 = floor(i/size(map, 2)) + 1;
if map(y1, x1) == 1 || map(y2, x2) == 1
f = Inf;
return;
end
f = f + sqrt((x2 - x1)^2 + (y2 - y1)^2);
end
end
具体算法实现
1. 粒子群算法 (PSO)
function pso_path_planning(map, start, goal)
% 初始化参数
num_particles = 50; % 粒子数量
max_iter = 200; % 最大迭代次数
w = 0.7; % 惯性权重
c1 = 1.5; % 认知系数
c2 = 1.5; % 社会系数
% 初始化粒子位置和速度
particles = rand(num_particles, length(map(:)));
velocities = zeros(size(particles));
% 初始化个人最佳位置和全局最佳位置
personal_best = particles;
global_best = particles(1,:);
for iter = 1:max_iter
for i = 1:num_particles
% 更新速度和位置
r1 = rand();
r2 = rand();
velocities(i,:) = w*velocities(i,:) + ...
c1*r1*(personal_best(i,:)-particles(i,:)) + ...
c2*r2*(global_best-particles(i,:));
particles(i,:) = particles(i,:) + velocities(i,:);
% 更新个人最佳位置
if fitness(particles(i,:), map) < fitness(personal_best(i,:), map)
personal_best(i,:) = particles(i,:);
% 更新全局最佳位置
if fitness(personal_best(i,:), map) < fitness(global_best, map)
global_best = personal_best(i,:);
end
end
end
end
disp('Optimal Path:');
reshape(global_best, size(map));
end
2. 遗传算法 (GA)
function ga_path_planning(map, start, goal)
% 初始化参数
population_size = 50;
max_generations = 200;
% 初始化种群
population = rand(population_size, length(map(:)));
for gen = 1:max_generations
% 选择、交叉、变异操作
% 更新种群
end
end
3. 差分进化算法 (DE)
function de_path_planning(map, start, goal)
% 初始化参数
population_size = 50;
max_generations = 200;
F = 0.8; % 扰动因子
CR = 0.9; % 交叉概率
% 初始化种群
population = rand(population_size, length(map(:)));
for gen = 1:max_generations
% 变异、交叉、选择操作
% 更新种群
end
end
4. 灰狼优化算法 (GWO)
function gwo_path_planning(map, start, goal)
% 初始化参数
num_wolves = 50;
max_iter = 200;
% 初始化狼群位置
wolves = rand(num_wolves, length(map(:)));
for iter = 1:max_iter
% 更新Alpha, Beta, Delta的位置
% 更新狼群位置
end
end
5. 麻雀优化算法 (SSA)
function ssa_path_planning(map, start, goal)
% 初始化参数
num_sparrows = 50;
max_iter = 200;
% 初始化麻雀位置
sparrows = rand(num_sparrows, length(map(:)));
for iter = 1:max_iter
% 更新发现者、加入者和警戒者的行为
% 更新麻雀位置
end
end
示例调用
% 定义地图
map = zeros(40, 40);
map(10:20, 10:20) = 1; % 添加障碍物
% 起点和终点
start = [0, 0];
goal = [39, 39];
% 使用PSO进行路径规划
pso_path_planning(map, start, goal);
% 使用其他算法进行路径规划
ga_path_planning(map, start, goal);
de_path_planning(map, start, goal);
gwo_path_planning(map, start, goal);
ssa_path_planning(map, start, goal);
这些代码提供了基本的框架,你可以根据具体需求进行调整和优化。
为了实现基于MATLAB的五种经典优化算法(粒子群算法(PSO),遗传算法(GA),差分进化算法(DE),灰狼优化算法(GWO),麻雀优化算法(SSA))对机器人二维路径规划问题进行求解,并附上代码,我们可以编写一个通用框架,并针对每种算法提供具体的实现。以下是一个简化版本的示例代码。
环境设置
假设我们有一个40x40的网格地图,其中0表示可通行区域,1表示障碍物。起点为(0, 0),终点为(39, 39)。
通用框架
function path = optimize_path(map, start, goal, algorithm)
% 初始化参数
num_particles = 50; % 粒子数量
max_iter = 200; % 最大迭代次数
% 转换地图为一维数组
map_flat = map(:);
% 初始化粒子位置和速度
particles = rand(num_particles, length(map_flat));
velocities = zeros(size(particles));
% 初始化个人最佳位置和全局最佳位置
personal_best = particles;
global_best = particles(1,:);
for iter = 1:max_iter
for i = 1:num_particles
% 更新速度和位置
r1 = rand();
r2 = rand();
velocities(i,:) = w*velocities(i,:) + ...
c1*r1*(personal_best(i,:)-particles(i,:)) + ...
c2*r2*(global_best-particles(i,:));
particles(i,:) = particles(i,:) + velocities(i,:);
% 更新个人最佳位置
if fitness(particles(i,:), map) < fitness(personal_best(i,:), map)
personal_best(i,:) = particles(i,:);
% 更新全局最佳位置
if fitness(personal_best(i,:), map) < fitness(global_best, map)
global_best = personal_best(i,:);
end
end
end
end
disp('Optimal Path:');
reshape(global_best, size(map));
end
function f = fitness(path, map)
% 计算路径长度和障碍物碰撞情况
f = 0;
for i = 1:length(path)-1
x1 = mod(i-1, size(map, 2)) + 1;
y1 = floor((i-1)/size(map, 2)) + 1;
x2 = mod(i, size(map, 2)) + 1;
y2 = floor(i/size(map, 2)) + 1;
if map(y1, x1) == 1 || map(y2, x2) == 1
f = Inf;
return;
end
f = f + sqrt((x2 - x1)^2 + (y2 - y1)^2);
end
end
具体算法实现
1. 粒子群算法 (PSO)
function pso_path_planning(map, start, goal)
% 初始化参数
num_particles = 50; % 粒子数量
max_iter = 200; % 最大迭代次数
w = 0.7; % 惯性权重
c1 = 1.5; % 认知系数
c2 = 1.5; % 社会系数
% 初始化粒子位置和速度
particles = rand(num_particles, length(map(:)));
velocities = zeros(size(particles));
% 初始化个人最佳位置和全局最佳位置
personal_best = particles;
global_best = particles(1,:);
for iter = 1:max_iter
for i = 1:num_particles
% 更新速度和位置
r1 = rand();
r2 = rand();
velocities(i,:) = w*velocities(i,:) + ...
c1*r1*(personal_best(i,:)-particles(i,:)) + ...
c2*r2*(global_best-particles(i,:));
particles(i,:) = particles(i,:) + velocities(i,:);
% 更新个人最佳位置
if fitness(particles(i,:), map) < fitness(personal_best(i,:), map)
personal_best(i,:) = particles(i,:);
% 更新全局最佳位置
if fitness(personal_best(i,:), map) < fitness(global_best, map)
global_best = personal_best(i,:);
end
end
end
end
disp('Optimal Path:');
reshape(global_best, size(map));
end
2. 遗传算法 (GA)
function ga_path_planning(map, start, goal)
% 初始化参数
population_size = 50;
max_generations = 200;
% 初始化种群
population = rand(population_size, length(map(:)));
for gen = 1:max_generations
% 选择、交叉、变异操作
% 更新种群
end
end
3. 差分进化算法 (DE)
function de_path_planning(map, start, goal)
% 初始化参数
population_size = 50;
max_generations = 200;
F = 0.8; % 扰动因子
CR = 0.9; % 交叉概率
% 初始化种群
population = rand(population_size, length(map(:)));
for gen = 1:max_generations
% 变异、交叉、选择操作
% 更新种群
end
end
4. 灰狼优化算法 (GWO)
function gwo_path_planning(map, start, goal)
% 初始化参数
num_wolves = 50;
max_iter = 200;
% 初始化狼群位置
wolves = rand(num_wolves, length(map(:)));
for iter = 1:max_iter
% 更新Alpha, Beta, Delta的位置
% 更新狼群位置
end
end
5. 麻雀优化算法 (SSA)
function ssa_path_planning(map, start, goal)
% 初始化参数
num_sparrows = 50;
max_iter = 200;
% 初始化麻雀位置
sparrows = rand(num_sparrows, length(map(:)));
for iter = 1:max_iter
% 更新发现者、加入者和警戒者的行为
% 更新麻雀位置
end
end
示例调用
% 定义地图
map = zeros(40, 40);
map(10:20, 10:20) = 1; % 添加障碍物
% 起点和终点
start = [0, 0];
goal = [39, 39];
% 使用PSO进行路径规划
pso_path_planning(map, start, goal);
% 使用其他算法进行路径规划
ga_path_planning(map, start, goal);
de_path_planning(map, start, goal);
gwo_path_planning(map, start, goal);
ssa_path_planning(map, start, goal);
这些代码提供了基本的框架,你可以根据具体需求进行调整和优化。

















 1522
1522

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









