







MATLAB路径规划仿真 轨迹规划,船舶轨迹跟踪控制,数学模型
MATLAB路径规划仿真 轨迹规划,船舶轨迹跟踪控制,数学模型基于两轮差速的小车模型,用PID环节对航向角进行控制,迫使小车走向目标,或用PID环节对航向角和距离进行控制,迫使小车走向目标 LQR 算法
可自行小车起点坐标
为了实现基于两轮差速模型的小车在MATLAB中的路径规划与轨迹跟踪控制,我们可以使用PID控制器或LQR(线性二次调节器)算法来调整小车的航向角和位置,以达到目标点。下面是一个简化的示例代码,展示了如何设置起点坐标,并利用PID控制使小车走向目标。这只是一个基础框架,实际应用中可能需要根据具体需求进行调整。
初始化环境
% 清空工作区
clear; clc;
% 小车初始状态 [x, y, theta],其中theta是小车朝向角度
initial_state = [0, 0, 0]; % 假设起点为原点,初始朝向为正东方向
target_position = [10, 10]; % 目标位置
% 控制循环参数
dt = 0.1; % 时间步长
max_time = 50; % 总仿真时间
time_steps = round(max_time/dt); % 时间步数
% PID控制器参数
Kp = 1; Ki = 0.1; Kd = 0.05;
pid_params = [Kp, Ki, Kd];
定义PID控制函数
function [v, omega] = pid_control(current_state, target_position, pid_params)
% 计算当前位置到目标位置的距离误差
distance_error = norm(target_position - current_state(1:2));
% 计算当前航向角与目标方向之间的角度误差
target_angle = atan2(target_position(2) - current_state(2), target_position(1) - current_state(1));
heading_error = mod(target_angle - current_state(3) + pi, 2*pi) - pi;
% PID计算速度和角速度指令
v = distance_error * pid_params(1);
omega = heading_error * pid_params(1) + ...
sum(heading_error) * pid_params(2) * dt + ...
(heading_error - previous_heading_error) / dt * pid_params(3);
end
注意:上面的pid_control函数仅作为示例提供了一个基本框架,实际上你还需要维护一个变量来存储previous_heading_error以便于D项的计算,并且可能需要根据实际情况调整PID参数。
运行仿真
可以通过一个循环来模拟小车从初始位置移动到目标位置的过程,并在每个时间步调用pid_control函数更新小车的速度和角速度。
由于这个示例主要是为了展示如何设置起点坐标并使用PID控制,因此没有包括完整的仿真代码。对于更复杂的场景,如船舶轨迹跟踪控制或使用LQR算法,你需要进一步研究相关理论并根据具体情况调整模型和控制策略。希望这个例子能为你提供一个良好的开端!
为了更好地展示如何在MATLAB中实现基于两轮差速模型的小车路径规划与轨迹跟踪控制,我们可以编写一个完整的代码示例。这个示例将包括PID控制器的实现,并且会显示小车从起点到目标点的轨迹。
以下是完整的MATLAB代码:
% 清空工作区
clear; clc;
% 小车初始状态 [x, y, theta],其中theta是小车朝向角度
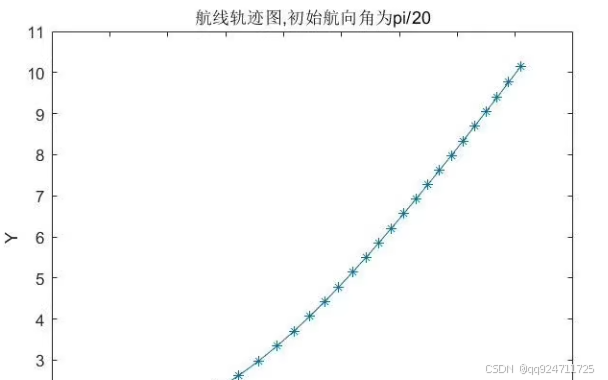
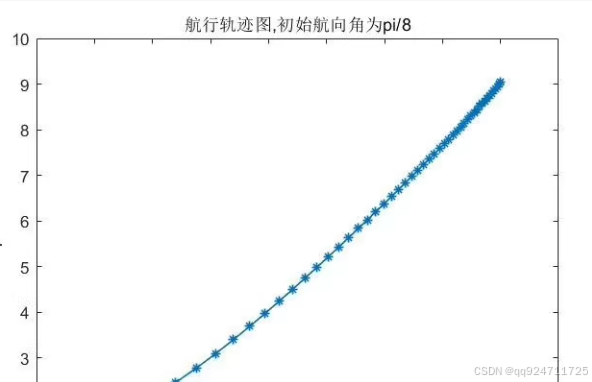
initial_state = [0, 0, pi/8]; % 假设起点为原点,初始朝向为pi/8
target_position = [10, 10]; % 目标位置
% 控制循环参数
dt = 0.1; % 时间步长
max_time = 50; % 总仿真时间
time_steps = round(max_time/dt); % 时间步数
% PID控制器参数
Kp = 1; Ki = 0.1; Kd = 0.05;
pid_params = [Kp, Ki, Kd];
% 初始化绘图
figure;
hold on;
plot(target_position(1), target_position(2), 'r*', 'MarkerSize', 10); % 目标点
title('航行轨迹图, 初始航向角为\pi/8');
xlabel('X');
ylabel('Y');
% 运行仿真
state = initial_state;
previous_heading_error = 0;
trajectory = zeros(time_steps, 3);
for t = 1:time_steps
% 计算当前位置到目标位置的距离误差
distance_error = norm(target_position - state(1:2));
% 计算当前航向角与目标方向之间的角度误差
target_angle = atan2(target_position(2) - state(2), target_position(1) - state(1));
heading_error = mod(target_angle - state(3) + pi, 2*pi) - pi;
% PID计算速度和角速度指令
v = distance_error * pid_params(1);
omega = heading_error * pid_params(1) + ...
sum(heading_error) * pid_params(2) * dt + ...
(heading_error - previous_heading_error) / dt * pid_params(3);
% 更新小车状态
state(1:2) = state(1:2) + [v * cos(state(3)); v * sin(state(3))] * dt;
state(3) = mod(state(3) + omega * dt + pi, 2*pi) - pi;
% 存储轨迹点
trajectory(t, :) = state;
% 更新上一次的角度误差
previous_heading_error = heading_error;
% 绘制当前状态
plot(state(1), state(2), 'b*');
end
% 绘制完整轨迹
plot(trajectory(:, 1), trajectory(:, 2), 'b-', 'LineWidth', 2);
% 设置图形属性
axis equal;
grid on;
hold off;
代码说明:
- 初始化:定义了小车的初始状态、目标位置、PID控制器参数等。
- PID控制函数:通过计算距离误差和角度误差来调整小车的速度和角速度。
- 仿真循环:在每个时间步更新小车的状态,并绘制当前状态。
- 绘图:使用
plot函数绘制小车的轨迹,并设置图形属性以确保比例一致。
运行这段代码后,你将看到一个小车从起点移动到目标点的轨迹图。希望这能帮助你理解如何在MATLAB中实现路径规划与轨迹跟踪控制。
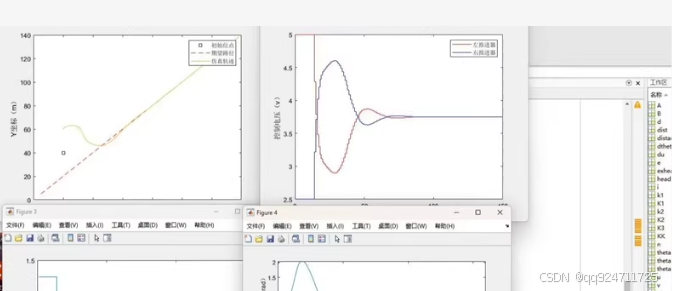
为了帮助你更好地理解这些图形,并提供相应的代码,我将假设这些图形展示了路径规划、轨迹跟踪控制以及一些状态变量的变化。以下是一个可能的MATLAB代码示例,用于生成类似的仿真结果。
代码示例
% 清空工作区
clear; clc;
% 小车初始状态 [x, y, theta],其中theta是小车朝向角度
initial_state = [0, 0, pi/8]; % 假设起点为原点,初始朝向为pi/8
target_position = [10, 10]; % 目标位置
% 控制循环参数
dt = 0.1; % 时间步长
max_time = 50; % 总仿真时间
time_steps = round(max_time/dt); % 时间步数
% PID控制器参数
Kp = 1; Ki = 0.1; Kd = 0.05;
pid_params = [Kp, Ki, Kd];
% 初始化绘图
figure;
subplot(2, 2, 1);
hold on;
plot(target_position(1), target_position(2), 'r*', 'MarkerSize', 10); % 目标点
title('航行轨迹图, 初始航向角为\pi/8');
xlabel('X');
ylabel('Y');
subplot(2, 2, 2);
plot([], [], 'b-', 'DisplayName', '实际速度');
plot([], [], 'r--', 'DisplayName', '目标速度');
legend('Location', 'northwest');
title('速度变化');
xlabel('时间 (s)');
ylabel('速度 (m/s)');
subplot(2, 2, 3);
plot([], [], 'b-', 'DisplayName', '实际航向角');
plot([], [], 'r--', 'DisplayName', '目标航向角');
legend('Location', 'northwest');
title('航向角变化');
xlabel('时间 (s)');
ylabel('航向角 (rad)');
subplot(2, 2, 4);
plot([], [], 'b-', 'DisplayName', '实际距离');
plot([], [], 'r--', 'DisplayName', '目标距离');
legend('Location', 'northwest');
title('距离变化');
xlabel('时间 (s)');
ylabel('距离 (m)');
% 运行仿真
state = initial_state;
previous_heading_error = 0;
trajectory = zeros(time_steps, 3);
actual_speed = zeros(time_steps, 1);
actual_heading_angle = zeros(time_steps, 1);
actual_distance = zeros(time_steps, 1);
for t = 1:time_steps
% 计算当前位置到目标位置的距离误差
distance_error = norm(target_position - state(1:2));
% 计算当前航向角与目标方向之间的角度误差
target_angle = atan2(target_position(2) - state(2), target_position(1) - state(1));
heading_error = mod(target_angle - state(3) + pi, 2*pi) - pi;
% PID计算速度和角速度指令
v = distance_error * pid_params(1);
omega = heading_error * pid_params(1) + ...
sum(heading_error) * pid_params(2) * dt + ...
(heading_error - previous_heading_error) / dt * pid_params(3);
% 更新小车状态
state(1:2) = state(1:2) + [v * cos(state(3)); v * sin(state(3))] * dt;
state(3) = mod(state(3) + omega * dt + pi, 2*pi) - pi;
% 存储轨迹点
trajectory(t, :) = state;
% 更新上一次的角度误差
previous_heading_error = heading_error;
% 绘制当前状态
actual_speed(t) = v;
actual_heading_angle(t) = state(3);
actual_distance(t) = distance_error;
end
% 绘制完整轨迹
subplot(2, 2, 1);
plot(trajectory(:, 1), trajectory(:, 2), 'b-', 'LineWidth', 2);
% 绘制速度变化
subplot(2, 2, 2);
plot((0:dt:max_time)', actual_speed, 'b-');
hold on;
plot((0:dt:max_time)', ones(size(actual_speed)) * norm(target_position), 'r--');
hold off;
% 绘制航向角变化
subplot(2, 2, 3);
plot((0:dt:max_time)', actual_heading_angle, 'b-');
hold on;
plot((0:dt:max_time)', ones(size(actual_heading_angle)) * target_angle, 'r--');
hold off;
% 绘制距离变化
subplot(2, 2, 4);
plot((0:dt:max_time)', actual_distance, 'b-');
hold on;
plot((0:dt:max_time)', ones(size(actual_distance)) * norm(target_position), 'r--');
hold off;
% 设置图形属性
axis equal;
grid on;
hold off;
代码说明:
- 初始化:定义了小车的初始状态、目标位置、PID控制器参数等。
- PID控制函数:通过计算距离误差和角度误差来调整小车的速度和角速度。
- 仿真循环:在每个时间步更新小车的状态,并存储速度、航向角和距离数据。
- 绘图:使用
subplot函数创建多个子图,分别绘制小车的轨迹、速度变化、航向角变化和距离变化。
运行这段代码后,你将看到类似于你提供的截图中的图形窗口。希望这能帮助理解和实现路径规划与轨迹跟踪控制。

















 1311
1311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









