







 本文介绍了如何在ABB和FANUC机器人中使用加速度指令(如ACCSET)来调整运动过程中的速度变化,减少惯性影响,从而提高路径精度和运动平滑性。通过在适当的位置插入ACC指令,如设置加速度和减速度,实现更顺畅的机器人操作。
本文介绍了如何在ABB和FANUC机器人中使用加速度指令(如ACCSET)来调整运动过程中的速度变化,减少惯性影响,从而提高路径精度和运动平滑性。通过在适当的位置插入ACC指令,如设置加速度和减速度,实现更顺畅的机器人操作。
机器人在点位与点位之间的运动,会存在速度上的变化,加速度指令的添加可以减小机器人在运动中,由高速到低速间惯性的带来的影响,修正机器人的路径误差,让机器人的运动更加顺滑。
一、ABB机器人指令添加
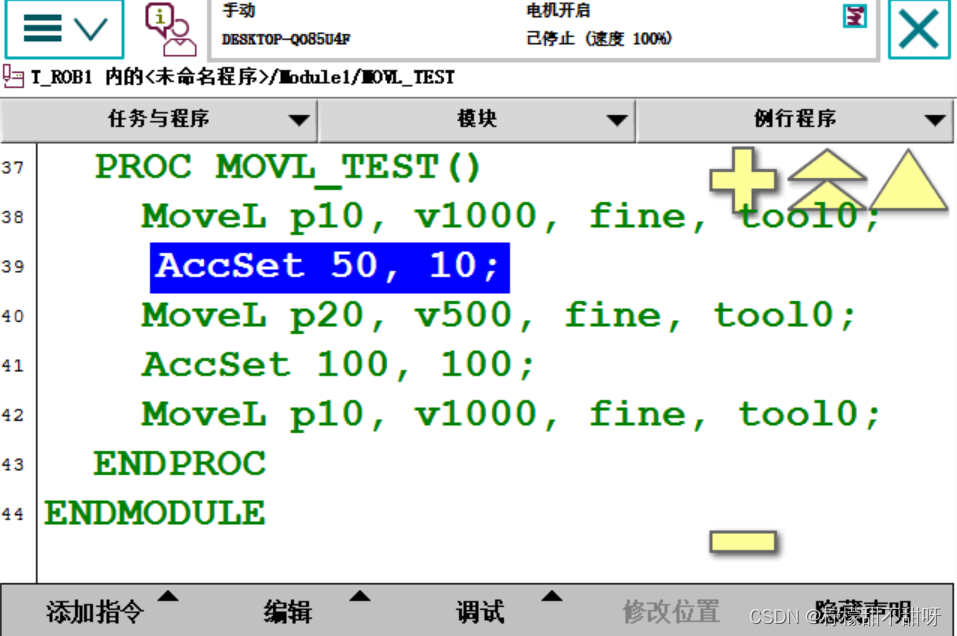
ABB机器人加速度指令为ACCSET指令
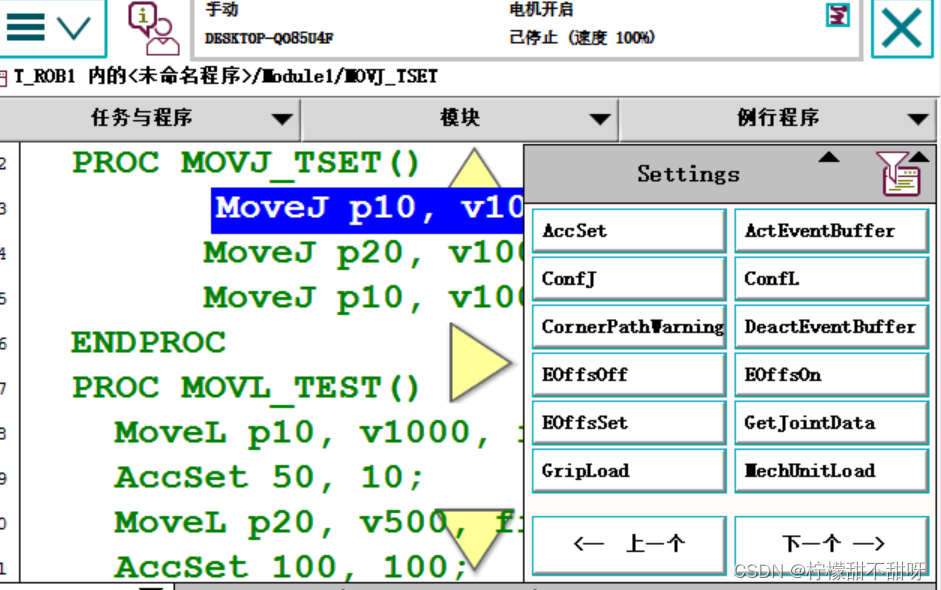
ACCSET指令中的第一个参数是设置加速度,第二个参数为设置减速度

将指令穿插添加在两个机器人两个运动指令之间
机器人在点位与点位之间的运动,会存在速度上的变化,加速度指令的添加可以减小机器人在运动中,由高速到低速间惯性的带来的影响,修正机器人的路径误差,让机器人的运动更加顺滑。
ABB机器人加速度指令为ACCSET指令
ACCSET指令中的第一个参数是设置加速度,第二个参数为设置减速度
将指令穿插添加在两个机器人两个运动指令之间
 5259
5259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























