







速度倍率变更的自定义,可以对在按住倍率键或者SHFT键的同时按下倍率键时的速度倍率的动作进行自定义。希望进行自定义时,在系统变量画面上选择$OVRD SETUP,分别独立设定在按住SHFT键的同时按下了倍率键时的动作,和不按SHFT键而按下了倍率键时的动作.系统变量.
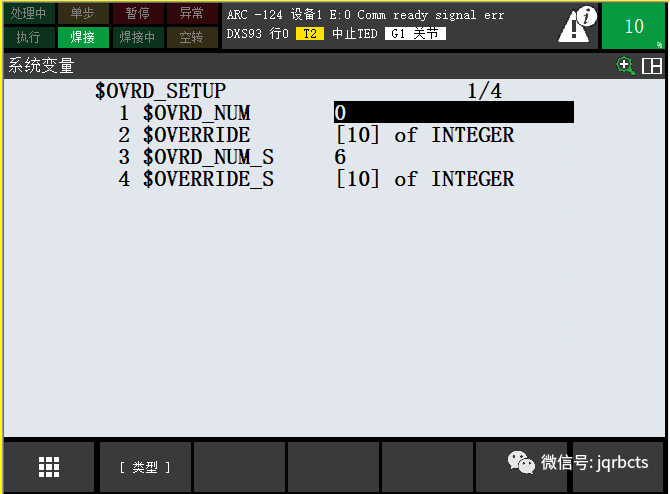
$OVRD SETUP 1/4
1.$OVRD NUM 0
2.$OVERRIDE [10]of INTEGER
3.$OVRD NUM S 0
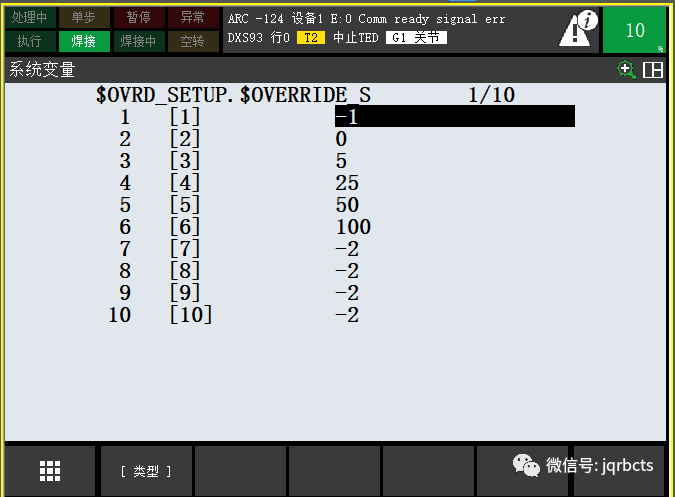
4.$OVERRIDE S [10]of INTEGER

1. $SCR.$FWDENBLOV
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











