






前言:
在机器人技术和人工智能快速发展的今天,仿真软件是将理论转化为实践的重要工具,推动着行业的进步。Nvidia的Isaac Sim仿真平台因其强大功能和灵活性受到广泛欢迎。从4.2到4.5版本的升级,带来了技术创新和新功能,为机器人仿真领域开启了新机遇。
Isaac Sim 4.5引入了多项新功能,提升了仿真的精确度和效率,增加了场景的多样性。改进包括更真实的物理引擎、更智能的AI集成、更高效的代码生成和更友好的用户界面,旨在提供更优质的仿真体验。这些更新对机器人工程师、AI研究者和创新者都非常有价值。
本文将通过实际操作和案例分析,展示4.5版本的新功能如何在实际应用中起作用,以及如何推动仿真技术发展。我们将探讨这些功能如何提高仿真精度、优化开发效率和实现技术集成。读者将全面了解4.5版本带来的变化及其对仿真领域的贡献。
随着我们探索这些新功能,会发现Isaac Sim 4.5不仅是一次升级,更是机器人技术发展的新起点。让我们一起探索4.5版本,体验其创新之处。
一:2025年及不久未来的机器人市场的前瞻性憧憬
1:未来市场新兴产业的带来的自动化新机遇
. 物流(LOGISTICS)
. 制造业(MANUFACTURING)
. 农业(AGRICULTURE)
. 建筑业(CONSTRUCTION)
. 医疗保健(HEALTHCARE)
. 零售业(RETAIL)
2:如何解锁机器人的新自主能力,增强它们的自主性和效率
一切将自主移动
智能拾取和放置未知物
通过移动机械手解锁的技能操作
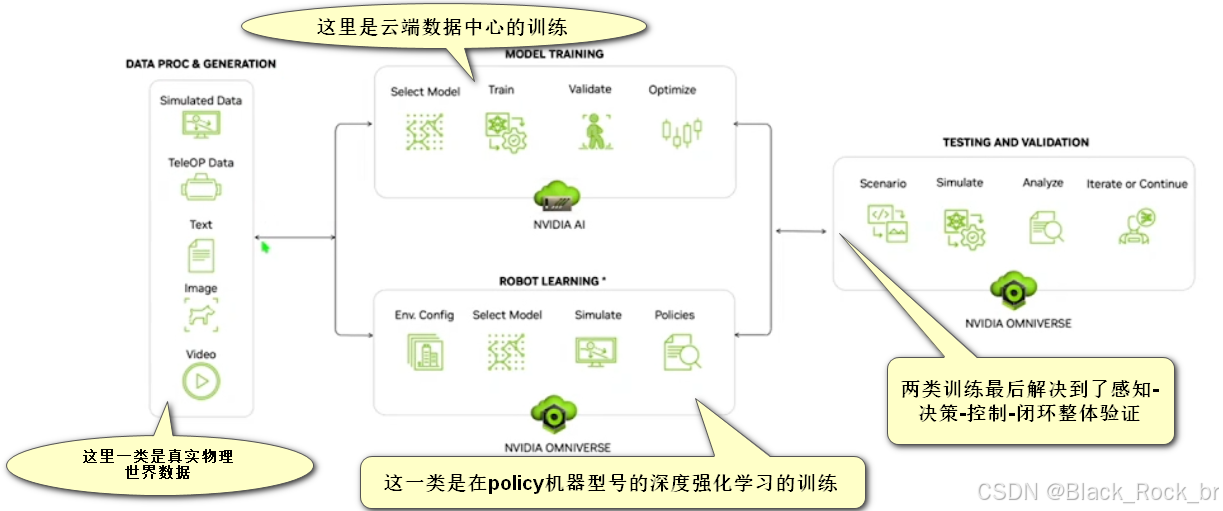
3:推动下一波机器人浪潮发展的核心技术
边缘人工智能计算(Edge AI Compute):
- 指的是在数据生成地附近进行数据处理的能力,这对于机器人实时决策和降低延迟至关重要。
人工智能模型训练(AI Model Training):
- 通过训练过程开发和完善人工智能模型,这对于提高机器人执行复杂任务的能力至关重要。
机器人学习(Robot Learning):
- 机器人通过经验、学习算法和与环境的互动来获取新技能或改进现有技能的过程。
测试/合成数据生成(Testing/Synthetic Data Generation):
- 创建模拟环境和数据来测试和训练机器人,无需物理原型,这可以加速开发并降低成本。
二:仿真:Isaac sim4.5机器人激情开发平台的一些新特性
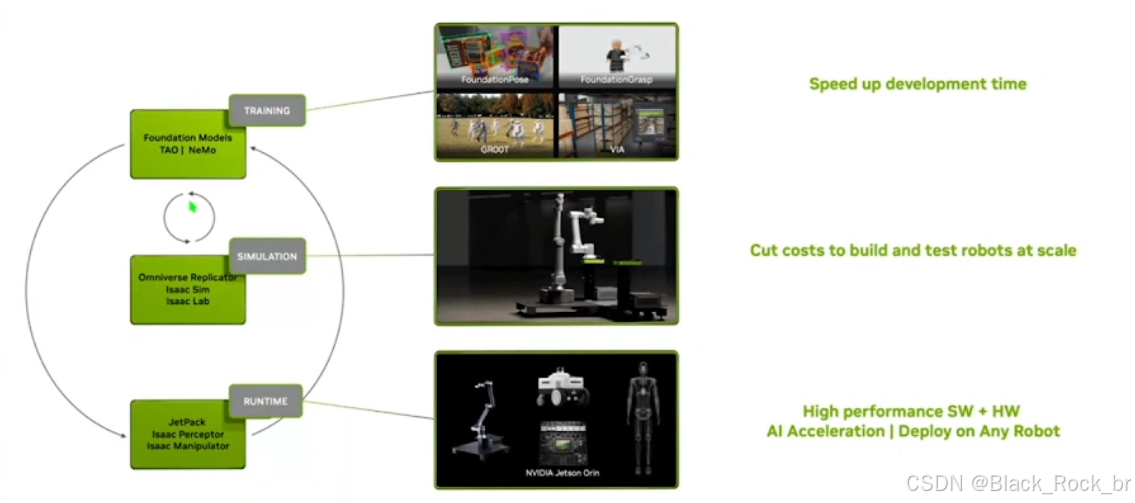
1:这个框架展示了一个从理论到实践的完整流程,强调了在机器人开发中利用AI和仿真技术的重要性,以及这些技术如何帮助实现更高效、更经济的机器人解决方案。
技术优势与应用:
-
加速开发时间:通过使用先进的AI模型和仿真技术,可以显著加快机器人应用的开发进程。
-
降低大规模构建和测试机器人的成本:在仿真环境中进行测试可以减少在现实世界中进行物理测试的需求,从而降低成本。
-
高性能软件和硬件:结合高性能的软件和硬件,可以提升机器人的性能和响应速度。
-
AI加速:利用专门的硬件(如NVIDIA Jetson Orin)来加速AI模型的运行,提高处理速度和效率。
-
在任何机器人上部署:开发的解决方案具有高度的通用性,可以部署在不同类型的机器人平台上。
具体实施步骤:
-
训练(Training):
-
使用基础模型(如TAO或NeMo)来训练AI,使其能够理解和执行特定的任务。
-
-
仿真(Simulation):
-
在仿真环境中(如Omniverse Replicator中的Isaac Sim或Isaac Lab)测试和优化机器人的行为和性能。
-
-
运行时(Runtime):
-
将训练好的模型和仿真结果应用到实际的机器人硬件上,如使用JetPack中的Isaac Perceptor和Isaac Manipulator。
-
-
该框架旨在通过整合先进的AI技术、仿真工具和高性能硬件,提供一个全面的解决方案,以加速机器人技术的发展和应用。
-
通过这种方法,可以更快速、更经济地开发出能够适应各种环境和任务的智能机器人。
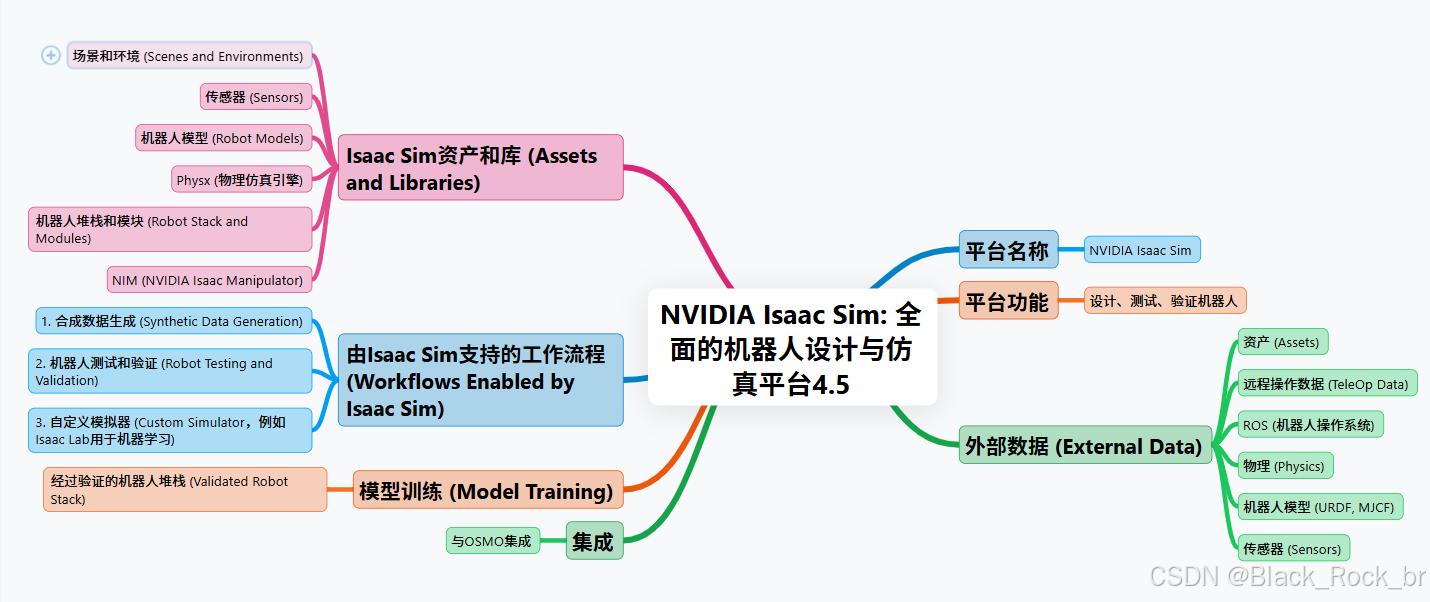
2:NVIDIA Isaac Sim4.5平台综合简介:
平台功能:- 设计、测试、验证机器人
外部数据(External Data):
- 资产(Assets)
- 远程操作数据(TeleOp Data)
- ROS(机器人操作系统)
- 物理(Physics)
- 机器人模型(URDF, MJCF)
- 传感器(Sensors)
Isaac Sim资产和库(Assets and Libraries):
- 场景和环境(Scenes and Environments)
- 传感器(Sensors)
- 机器人模型(Robot Models)
- Physx(物理仿真引擎)
- 机器人堆栈和模块(Robot Stack and Modules)
- NIM(NVIDIA Isaac Manipulator)
由Isaac Sim支持的工作流程关键步骤(Workflows Enabled by Isaac Sim):
1. 合成数据生成(Synthetic Data Generation)
2. 机器人测试和验证(Robot Testing and Validation)
3. 自定义模拟器(Custom Simulator,例如Isaac Lab用于机器学习)
模型训练(Model Training):- 经过验证的机器人堆栈(Validated Robot Stack)
集成:- 与OSMO集成
这个平台通过整合各种数据、资产和库,支持从合成数据生成到机器人测试和验证的完整工作流程,最终实现模型训练和机器人堆栈的验证。通过这种方式,NVIDIA Isaac Sim为机器人的开发和验证提供了一个全面的工具和环境。
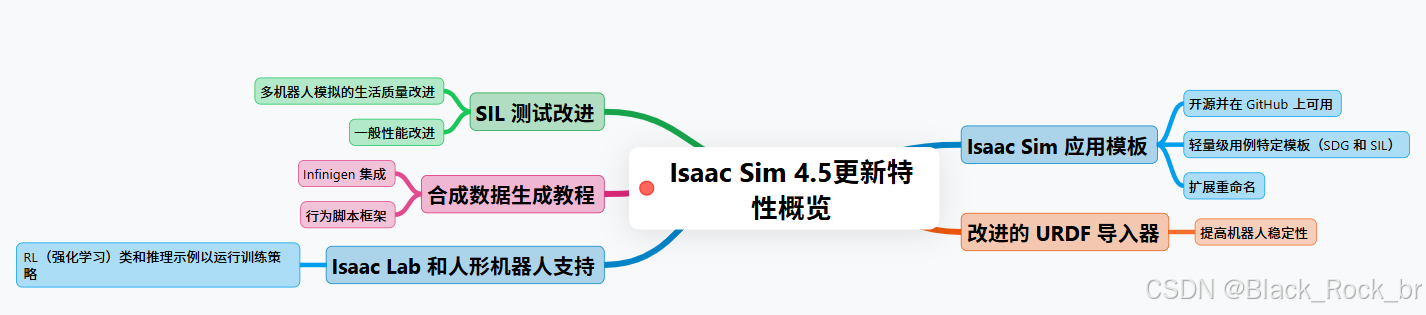
3:Isaac Sim 4.5 新特性探索分析
A:Isaac Sim app temple 应用模板
- 开源在 GitHub 上可用
- 轻量级用例特定模板(SDG 和 SIL)
- 扩展重命名
B:改进的 URDF 导入器
- 提高机器人稳定性
C:SIL 测试改进
- 多机器人模拟的生活质量改进
- 一般性能改进
D:合成数据生成
- Infinigen 集成
- 行为脚本框架
E:Isaac Lab 和人形机器人支持
- RL(强化学习)类和推理示例以运行训练策略
三:安装isaac sim 4.5 on ubuntu22.04
系统和硬件需求:
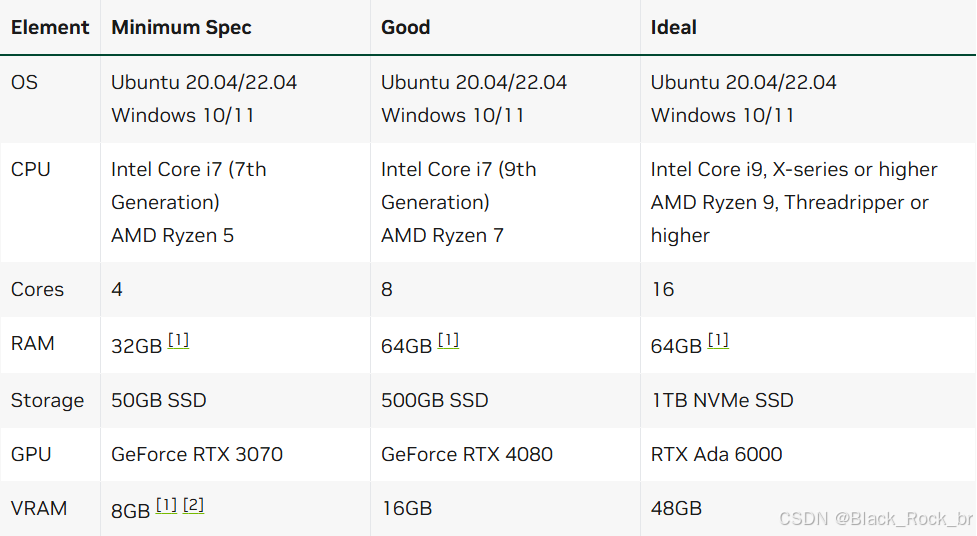
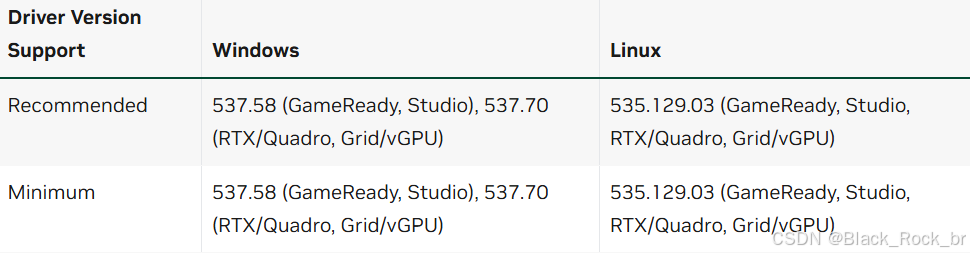
1-安装工作:
从 Isaac Sim 4.5 版本发布开始,可以直接下载 Isaac Sim 的压缩包文件。以下步骤假设 Isaac Sim 文件夹已经被解压到了下载目录。以下最新版4.5 for linux下载链接:
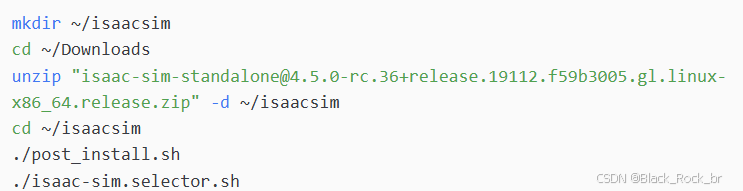
在 Linux 系统中,Isaac Sim 目录将被命名为 ${HOME}/Downloads/isaac-sim-standalone@*,其中 * 对应于 Isaac Sim 的版本号。
验证 Isaac Sim 安装
为了避免每次查找和定位 Isaac Sim 安装目录的开销,我们建议将以下环境变量导出到您的终端,以便完成剩余的安装说明:
-
ISAAC_SIM:设置为您的 Isaac Sim 安装目录的路径。 -
PATH:确保 Isaac Sim 的可执行文件路径被添加到系统的 PATH 环境变量中。 -
LD_LIBRARY_PATH(如果需要):确保 Isaac Sim 的库文件路径被添加到系统的库搜索路径中。
这样设置后,您就可以在终端中直接运行 Isaac Sim 相关的命令,而无需每次都指定完整的路径。
要验证您的 Linux 系统上的 Isaac Sim 安装,您可以按照以下步骤进行:
# Isaac Sim root directory
export ISAACSIM_PATH="${HOME}/Downloads/isaac-sim-standalone@4.5.0"
# Isaac Sim python executable
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"
检查模拟器是否按预期运行:
# note: you can pass the argument "--help" to see all arguments possible.
${ISAACSIM_PATH}/isaac-sim.sh
确认模拟器能够从独立的 Python 脚本中运行:
# checks that python path is set correctly
${ISAACSIM_PYTHON_EXE} -c "print('Isaac Sim configuration is now complete.')"
# checks that Isaac Sim can be launched from python
${ISAACSIM_PYTHON_EXE} ${ISAACSIM_PATH}/standalone_examples/api/isaacsim.core.api/add_cubes.py
如果您之前使用的是 Isaac Sim 的旧版本,那么在安装完成后首次运行时,您需要执行以下命令,以删除所有旧的用户数据和缓存变量:
${ISAACSIM_PATH}/isaac-sim.sh --reset-user
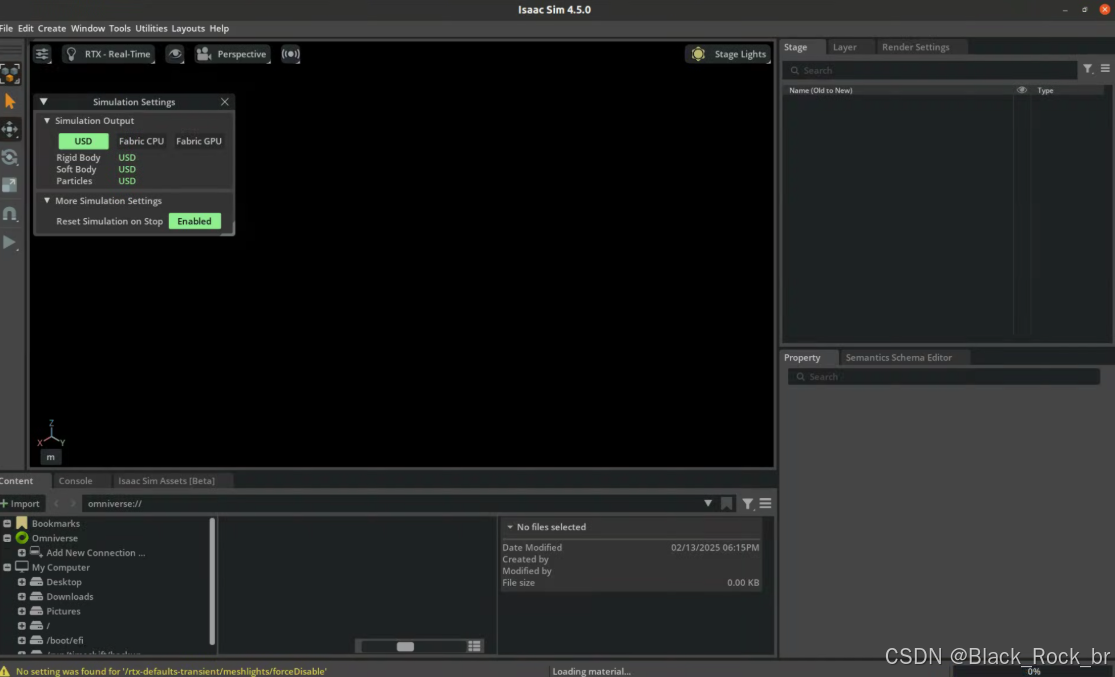
2:启动和初步化的体验之旅
如果你验证通过,那就可以开启体验开发机器人仿真的旅程。
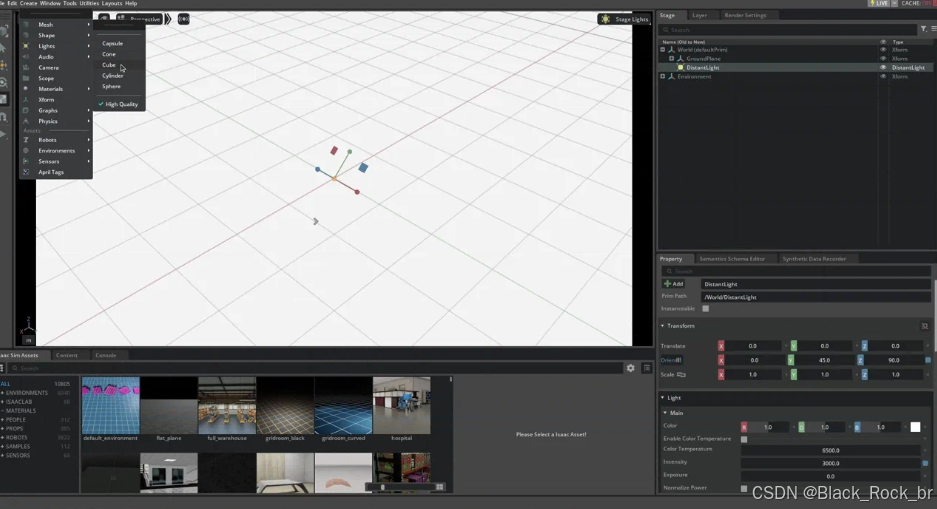
创建一个三维立体的尝试
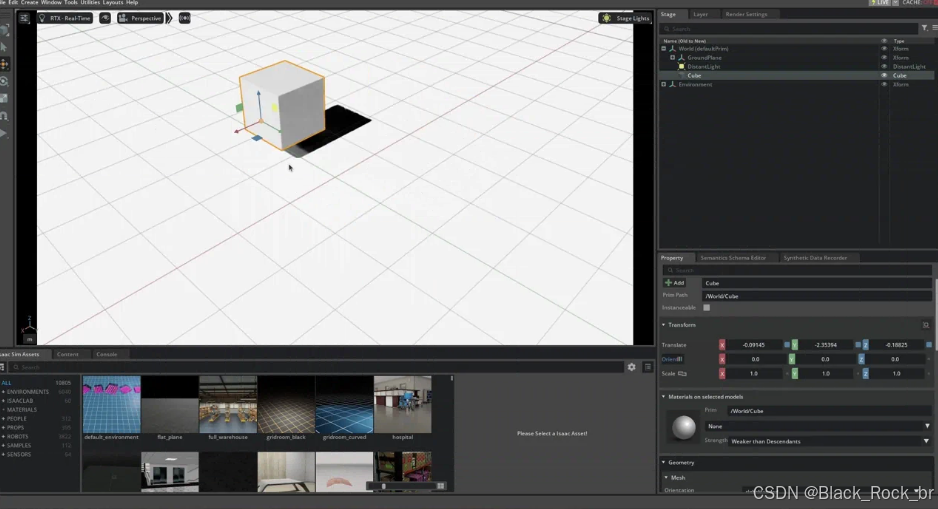
你耶可以尝试不同三维和复杂物体创建。
至此我们已经完成初步从安装到验证,到仿真物体及初步体验之旅,并尝试做了一下简单测试。
四:对isaac sim4.5.0体验的感受和心得分享及总结
1:GPU加速仿真效果对比
Isaac Sim 4.5相对于4.2版本的GPU加速仿真效果对比:
Isaac Sim 4.5的GPU加速仿真改进:
1. 更快的启动速度:通过优化,启动时间提高了30%。
2. 更好的物理仿真性能:吞吐量提高高达70%,物理计算更加高效。
3. 支持更多TiledCamera实例:可以处理更复杂的场景,更好地利用GPU资源。
4. 增强的物理调试工具:OmniPVD工具改进,支持多达2000个环境的仿真工作负载。
5. 专用几何形状的物理支持:为机器人轮子设计的圆柱体和圆锥体几何形状,完全GPU加速。
6. 新的物理GPU过滤机制:在有限碰撞器数量的场景中,可以更高效地共置强化学习环境。
总的来说,Isaac Sim 4.5在GPU加速仿真方面比4.2版本有显著提升,特别是在处理大规模仿真、复杂场景和物理计算时表现更好。与Isaac Lab 2.0结合使用可以获得最佳效果。
2:AI框架Pytorch与Isaac Sim集成的应用体验
基础体验:
集成 PyTorch 框架与 Isaac Sim 的系统在基础视觉分类任务中表现出色,具有较高的分类准确性和实时性。未来的工作可以集中在进一步优化模型,提高对圆柱等形状的识别准确率,以及探索更复杂的分类任务。
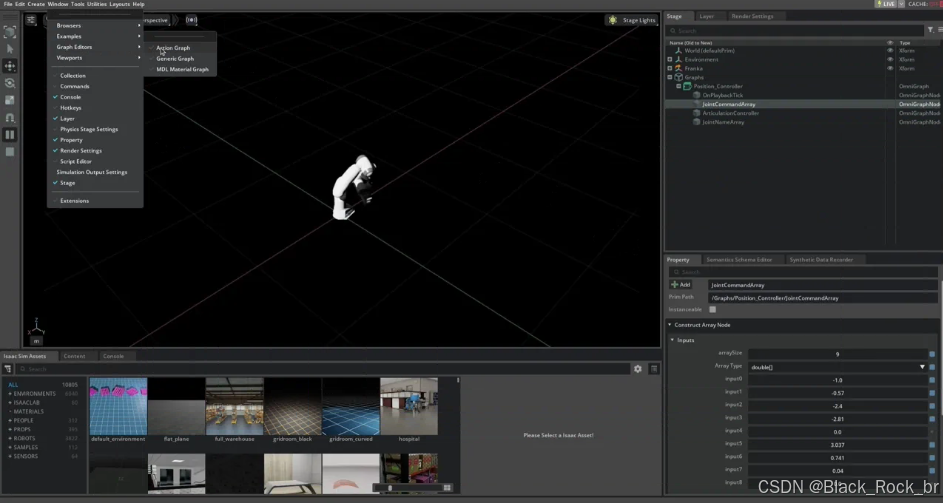
视觉引导:
视觉引导抓取任务在简单机械臂和预训练目标检测模型的辅助下,能够达到较高的成功率。然而,位置估计和抓取路径规划的准确性仍有提升空间。未来的工作可以集中在改进这些算法,以进一步提高抓取任务的成功率和鲁棒性
通过在Isaac Sim 4.5平台上对这两个系统的持续改进,预期能在自动化和机器人技术领域实现更高效的应用。
五:最后我们对此次体验的做一个整体性评价和期望
整体评价:
1. 模块化和可定制性提升:通过重命名和重构扩展,Isaac Sim 4.5提高了模块化程度,便于用户构建自定义应用程序。
2. URDF导入和设置改进:新版本的URDF导入器用户界面优化,流程简化,支持单独配置关节驱动,使机器人导入后即可使用。
3. 物理仿真和建模增强:用户可以精确控制机器人组件间的关节行为,通过设置刚度和阻尼等参数。
4. 新的关节可视化工具:引入的关节可视化工具方便用户检查选定基元的物理属性。
5. 模拟精度提升:实现了全动量守恒,提高了模拟的准确性。
6. 性能优化:渲染速度提高约1.2倍,优化了应用配置,减少了启动时间。
7. Isaac Lab 2.0的新特性:包括模仿学习工作流、平铺渲染性能提升、简化的安装过程以及性能改进。
8.仿真迁移物理可靠性增强:4.5捆绑isaac lab2.0加入缩小了仿真迁移物理数据误差
Isaac Sim 4.5在模块化、URDF导入、物理仿真、可视化工具、模拟精度和性能优化等方面进行了显著改进,为用户提供了更强大的机器人仿真和开发工具。
在未来的憧憬:
1. 增强兼容性:期望未来版本能支持更多传感器和机器人模型,以适应更广泛的应用场景。
2. 用户支持和文档:希望提供更丰富的教程和社区支持,帮助用户更快上手和解决问题。
3. 性能进一步提升:期待继续优化性能,特别是在处理大规模仿真和复杂场景时。
4. 高级仿真功能:期望增加更多高级仿真功能和分析工具,以支持更复杂的研究和开发需求。
5. 跨平台支持:希望未来版本能提供更好的跨平台支持,包括对不同操作系统的优化。
通过这些期望,我们相信Isaac Sim将继续发展,为用户提供更加全面和高效的机器人仿真解决方案。
如果你是新手可以从这里开始你的学习之旅:What Is Isaac Sim? — Isaac Sim Documentation

















 276
276

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









