






自动驾驶控制-纯跟踪算法路径跟踪仿真
matlab和carsim联合仿真搭建的无人驾驶纯跟踪控制器仿真验证,可以实现双移线,圆形,以及其他自定义的路径跟踪。
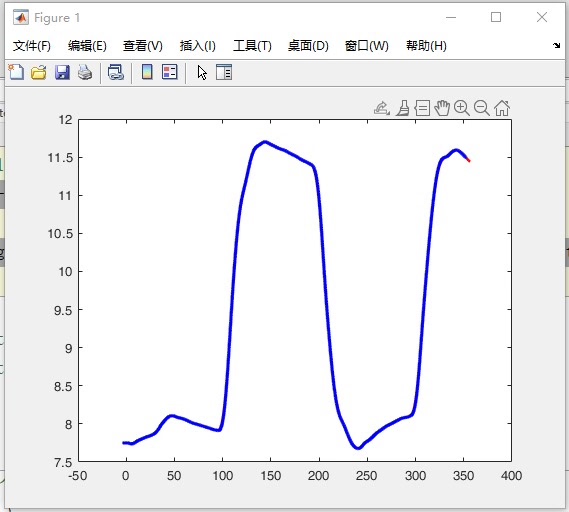
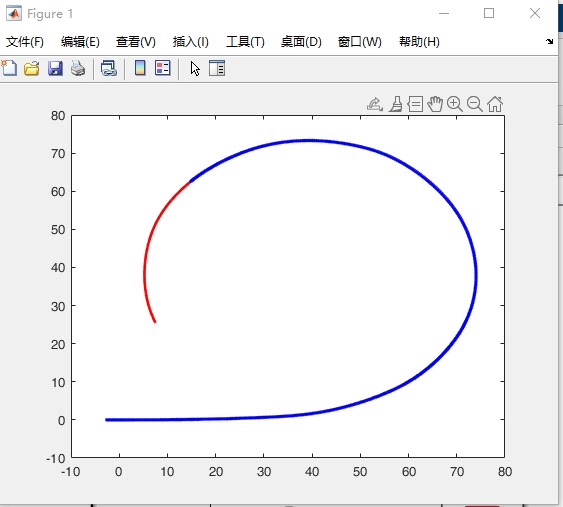
跟踪效果如图,几乎没有误差,跟踪误差在0.05m以内。
ID:3120704048436820
阿Xin的自动驾驶小店
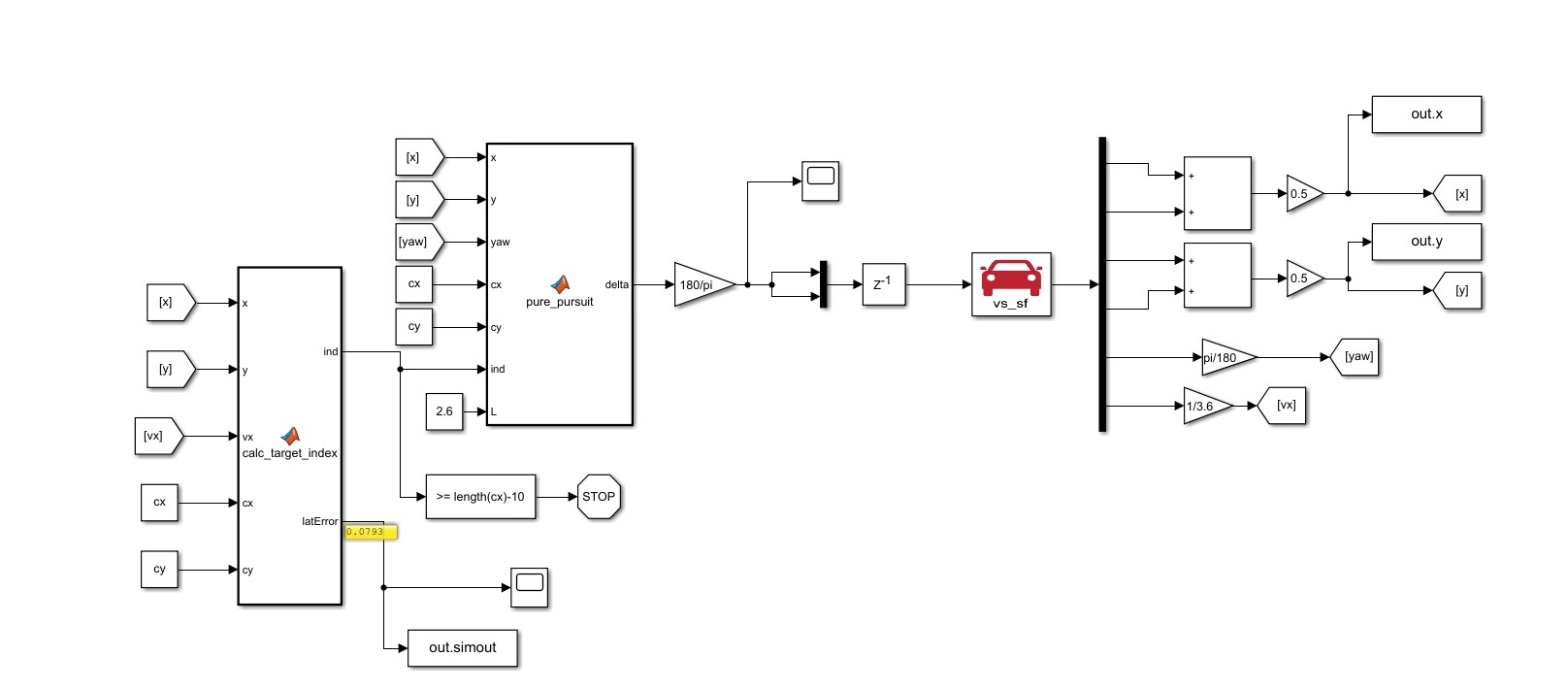
自动驾驶技术已经成为当代科技领域的热门话题之一。在实现自动驾驶的过程中,路径跟踪算法是其中关键的一环。本文将介绍一种基于纯跟踪算法的路径跟踪仿真方法,并结合Matlab和Carsim软件进行联合仿真搭建,以验证该控制器的性能。
路径跟踪是自动驾驶系统中的重要组成部分,其主要任务是将车辆准确地沿着预设路径行驶,并保持良好的稳定性和精确性。纯跟踪算法是一种常用的路径跟踪算法,其原理是通过计算车辆与预设路径之间的误差,并利用控制策略使车辆逐步减小这一误差,从而实现沿路径行驶。
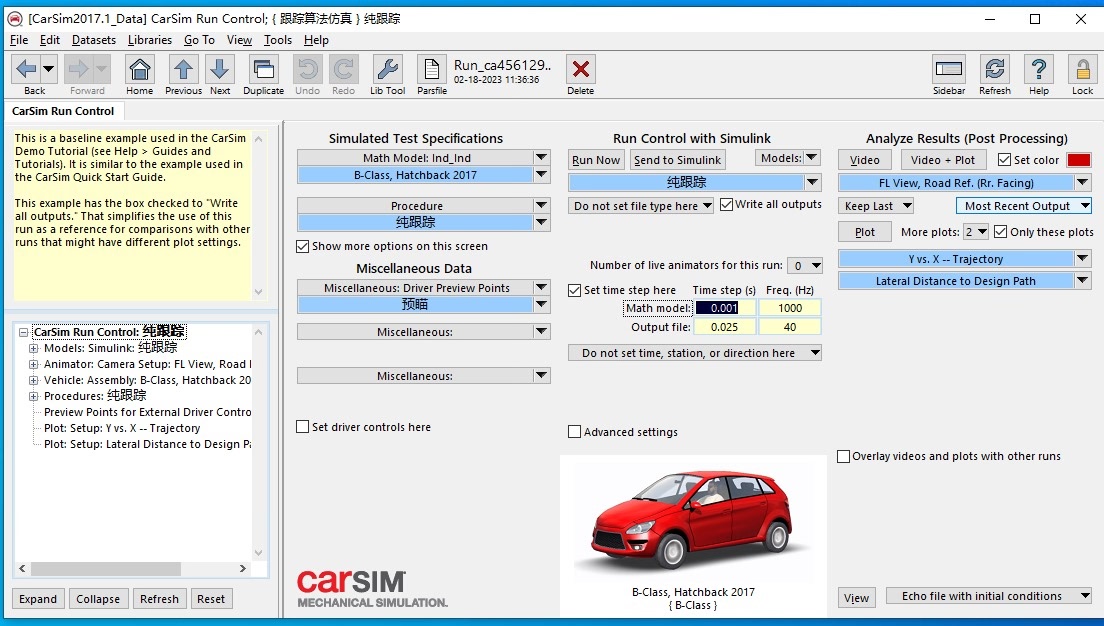
仿真是一种模拟真实情况的方法,可以在无风险的环境下进行测试和验证。本文所述的纯跟踪算法路径跟踪仿真采用了Matlab和Carsim两款软件进行联合仿真搭建。Matlab是一种功能强大的数学计算和数据分析工具,Carsim则是一款专业的车辆动力学仿真软件。通过将两者结合使用,可以更加准确地模拟车辆在实际道路上的行驶情况。
在仿真过程中,我们可以实现双移线、圆形甚至其他自定义路径的跟踪。通过对跟踪效果的观察和分析,我们可以发现该纯跟踪控制器几乎没有误差,跟踪误差可以控制在0.05米以内。这说明该控制器具有出色的性能,在实际应用中能够准确地跟踪预设路径。
需要注意的是,本文提供了相关的仿真结果和控制器性能展示,但不提供具体的示例代码和参考资料。我们鼓励读者根据自身需求去实现该控制器,并能够进行进一步的优化和改进。
最后,本文所述的纯跟踪算法路径跟踪仿真方法具有较高的可行性和实用性。对于对于自动驾驶技术感兴趣的读者,可以通过搜索关注b站up主阿Xin自动驾驶,该up主提供了相关的视频教程,可以帮助读者更好地理解和应用本文所述的方法。
需要说明的是,本文主要关注技术分析,不涉及价格、退货和售后等方面的内容。如果读者对该控制器有所需求,可以通过私信或者直接发送邮件到指定邮箱进行咨询,也可以通过QQ远程协助解决问题,但需要了解这些服务可能需要额外付费。
总而言之,本文围绕自动驾驶控制-纯跟踪算法路径跟踪仿真展开了详细的介绍。通过Matlab和Carsim联合仿真,我们验证了该控制器的性能,并提供了相关的仿真结果。希望本文能够帮助读者更好地了解和应用自动驾驶技术中的路径跟踪算法,实现更精确稳定的自动驾驶行驶。
以上相关代码,程序地址:http://wekup.cn/704048436820.html















 2341
2341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









