






如图所示,我是移植semantic_slam到我的ubutu20.4+ros-noetic下面,用到了orb_slam2,解决完问题并成功编译成功,但是报错推荐一篇在ubuntu20.4下安装博文
Ubuntu 20.04配置ORB-SLAM2和ORB-SLAM3运行环境+ROS实时运行ORB-SLAM2+各种相关库的安装_ZARDforever123的博客-CSDN博客
尝试了orbslam2段错误 (核心已转储) - 程序员大本营 的方法并没有成功解决问题
学习了在vscode中debug查看问题所在 ,【ROS】 在VScode中 ROS Debug 配置方法非常详细版_Kin__Zhang的博客-CSDN博客_debug ros vscode 
在VSCode发现在此处调用出错,怀疑是我的opencv版本出了问题,我装的是opencv4的版本
故下载了一个opencv3 ,多版本opencv共存见下文 ,修改好后重新编译运行
Ubuntu下多版本OpenCV共存和切换_W_Tortoise的博客-CSDN博客_ubuntu切换opencv版本

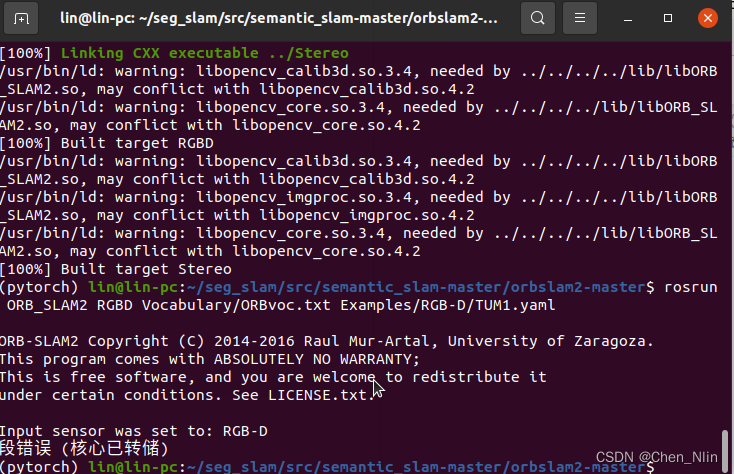
来到orb_slam下输入
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml

成功运行不报核心转存错误
未解决问题:

换回opencv3后报错,
ORB_SLAM2--源码编译_Z-Jeff的博客-CSDN博客_编译orbslam2
提到要将opencv换回opencv4,相互矛盾了。这两个错误暂时不影响RGBD使用,只能先放一边















 1908
1908











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









