







 本文详细介绍了因子图优化的演化过程,从塞巴斯蒂安的“平方根平滑建图”到迈克尔的iSAM和iSAM2,再到GTSAM框架的诞生。作者迈克尔·凯斯的开源软件和著作提供了深入理解这一领域的资源,而GTSAM则成为许多应用如SLAM的基础。建议阅读关键论文并查看相关视频以增进理解。
本文详细介绍了因子图优化的演化过程,从塞巴斯蒂安的“平方根平滑建图”到迈克尔的iSAM和iSAM2,再到GTSAM框架的诞生。作者迈克尔·凯斯的开源软件和著作提供了深入理解这一领域的资源,而GTSAM则成为许多应用如SLAM的基础。建议阅读关键论文并查看相关视频以增进理解。
因子图最初理论的发展,是一系列摸索的过程:ref三川小哥
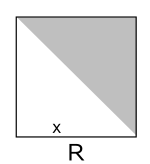
1、塞巴斯蒂安最开始就是研究图优化的,只不过换了一种模型表达方式,可能单纯为了水文章吧,叫做“平方根平滑建图”[1](建议阅读一下),这篇文章提出的概念就是批量更新。这里上帝埋下一个伏笔,因为后来他们发现这个模型竟然有一个的彩蛋。因为他们通过平方根的方法构建好了矩阵后,新添加的变量都是从最后一行。
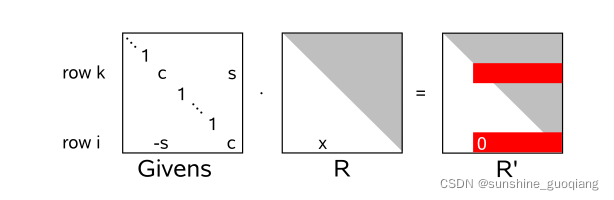
2、后来呢?Michael觉得,每个矩阵才添加了几行就得更新,能不能简化一点呢?这时候那个彩蛋就打开了,因为每次都是在最后面添加的,所以只要把后面的那几行“搞搞”就行了,就找到了一种Givens 旋转的方法就可以消元了(别说你没听过,数值方法必考知识点)。这时候作者就发了第二篇文章“iSAM”(增量平滑建图)[2],这里面呢,作者用的思路是,正常情况下,用Givens增量消元,如果误差太大,那就固定隔几分钟来个全部优化(又用到了论文[1])。
3、又过了一段时间,作者发现,为什么要分“增量优化”和“全局优化”两种模式呢?(作者大脑开始开挂了) 有没有这样一种方法呢,局部更新如果没有影响全局图,就更新局部;如果影响了全局,就更新全局?或者说有没有一种方法让我影响了多大区域就更新多大面积呢?
4、后来他就想到树结构(妙啊),从树的根部开始,受影响了多大范围,我就更新多大范围,嘻嘻嘻嘻。这个树该怎么构建呢?
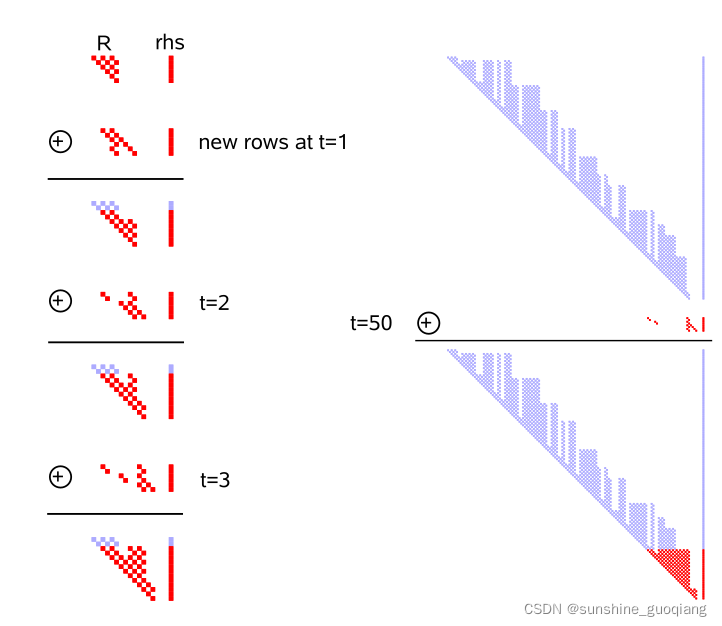
作者又想了无数个夜晚,接近崩溃的时候,找到了一种贝叶斯树的结构。这次呢就不用分“批量”和“增量”两种模式了,而是智能调节,所有的数据都在树结构上,新加进来的放在树根部,受影响的区域肯定是在刚加进来的地方。把受影响的区域提取出来。
main step like the pic,这就成了最终的贝叶斯树构建的因子图优化了,即iSAM2[3].
5、作者 Michal 自己还开源了个简单的因子图软件,知道的人不多,其实如果想看源代码,这个更好懂一点,代码量很少,[源码:ori-drs/isam]。他担心大家看不懂,就把这三篇论文写成了一本书《Incremental Smoothing and Mapping》
【下载:http://www.cs.cmu.edu/~kaess/pub/Kaess08tro.pdf】
6、最后,佐治亚州立大学的这些教授,觉得算法不错呀,干脆封装成一个框架吧,就是GTSAM了[https://github.com/borglab/gtsam],这个库编译好了以后就能出来一个matlab 的toolbox。
7、最后的最后,才出现了很多以这个框架为基础的应用性论文比如"SLAM ++"[4]和优化型论文“AprilSAM”[5]。
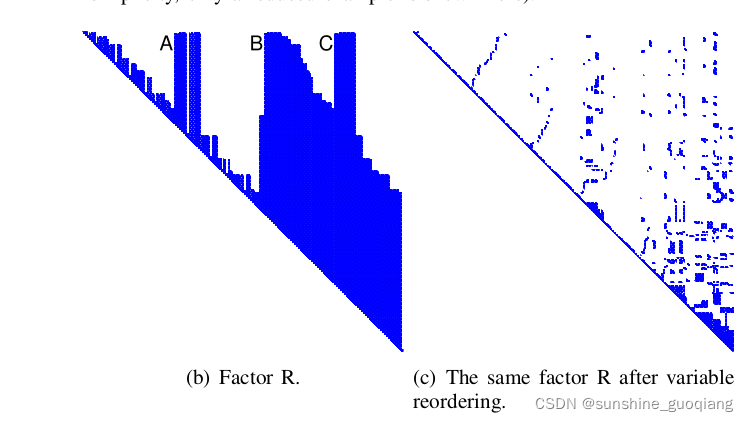
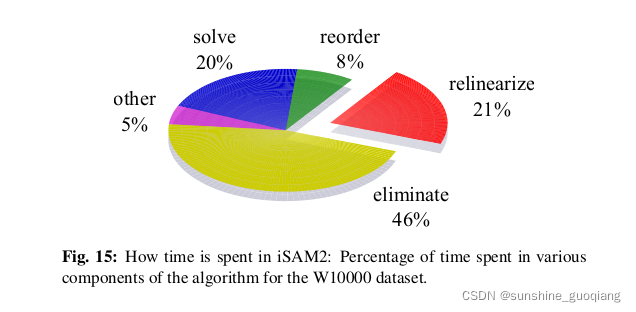
in order speed up ,reorder the variable and
总结:这些论文,建议 平方根sam[1],iSAM[2],iSAM2[3]这三篇原文阅读一下,体会下什么叫“平地起高楼”。其他两篇创新的,你可以借鉴看看他们怎么改进的。
二、书本和视频资源
-
这套理论综合整理成的一本书《Incremental Smoothing and Mapping》值得一读原文
【下载:http://www.cs.cmu.edu/~kaess/pub/Kaess08tro.pdf】 -
作者M. Kaess的公开课视频,这个视频里最关键的是有一个演示动画,演示了贝叶斯树原来是这样动态构建的.
【B站:https://b23.tv/BV1gk4y1R7Lb 】
【油管:https://www.youtube.com/watch?v=_W3Ua1Yg2fk&t=2170s】
三、论文下载地址
GTSAM/iSAM1/2资源整理


















 4597
4597

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











