







PathGo 导航模块的默认固定 IP 是 192.168.31.200 ,默认用户名为 eaibot , 默认密码为 eaibot 。
启动一个终端,运行以下命令启动底盘驱动(带平滑加减速)
$ ssh eaibot@192.168.31.200
$ roslaunch dashgo_driver demo.launch或者启动底盘驱动(带陀螺仪)
$ ssh eaibot@192.168.31.200
$ roslaunch dashgo_driver demo_imu.launch 通过 EAI 团队开发的手机 APP 控制,目前仅支持 Android。
在 APP 启动界面,选择 “WIFI” 便进入到WiFi连接界面,如下图所示:
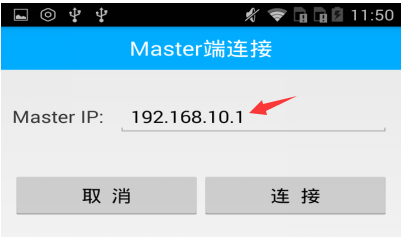
需要输入的 Master IP 是导航模块的 IP 地址,即192.168.31.200。
然后点击 连接
连接成功后,界面如下:
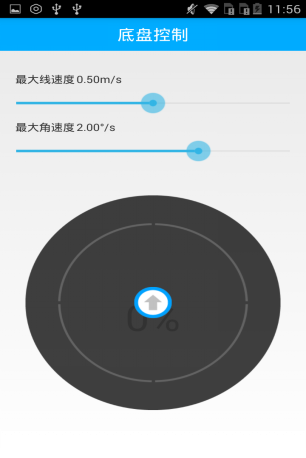
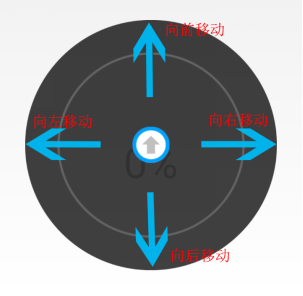
方向的操控,如下图所示:
注意:ROS 系统的 IP 必须与手机端的 IP 在同一个网段,即两者要连在同一个路由器上。
由于不常上微博,大家有疑问的可以直接添加我的微信:ros_robot。
我建了个技术讨论群,有需要的话,我可以拉你们进群一起讨论与研究ros,slam相关技术问题。
下面是我司EAI官方网站www.eaibot.com 和EAI官方微信公众号:EAI。
请大家多多支持。

















 9440
9440

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









