






永磁同步电机新型滑模扰动观测器控制(NSMDO)+无差拍电流预测控制(DBCC)
[1]速度环采用NSMDO
[2]电流环采用DBCC
本系列仿真所使用的电机参数一致。
ID:4740769082597777
略懂电机控制

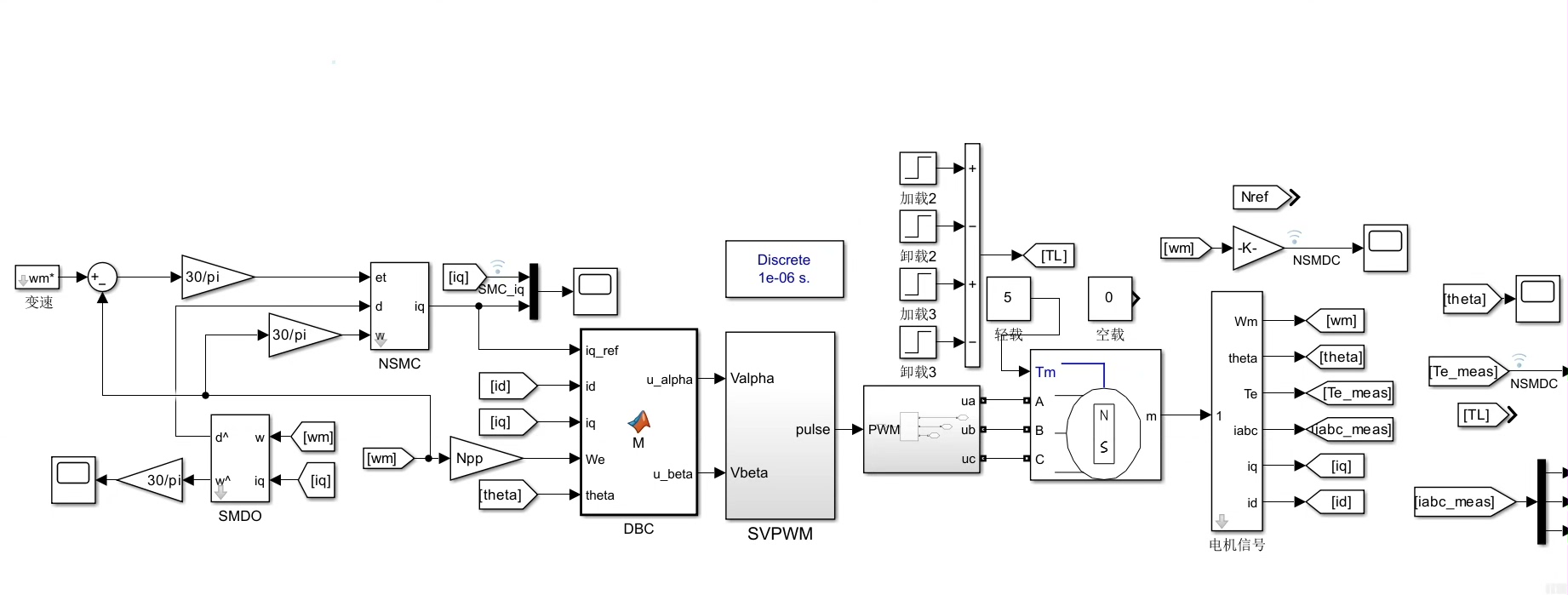
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)作为一种高效、高性能的电机类型,在工业控制领域得到了广泛的应用。而针对PMSM的控制算法,也是研究的热点之一。本文将介绍一种结合新型滑模扰动观测器控制(NSMDO)和无差拍电流预测控制(DBCC)的控制策略,并在仿真环境中进行验证。同时,本文所使用的电机参数是一致的。
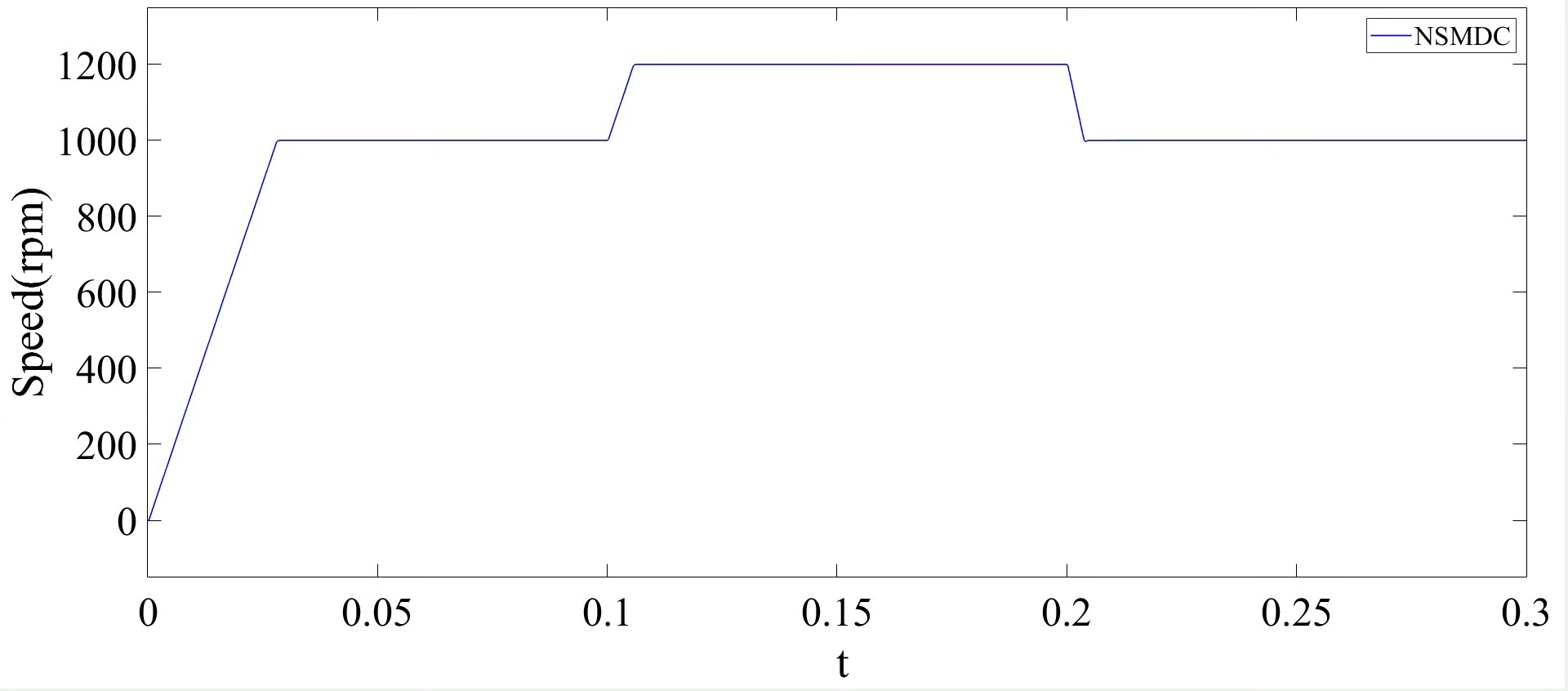
在PMSM的控制中,速度环的设计是至关重要的。本文采用了NSMDO作为速度环的控制算法。NSMDO是一种基于滑模控制的观测器,可以实现对电机速度状态的估计。其基本思想是通过引入滑动模式变量和扰动观测器来实现对系统状态的观测和估计。NSMDO不仅可以对系统的速度状态进行观测,还可以抵抗外部扰动的影响,提高系统的鲁棒性和抗干扰能力。
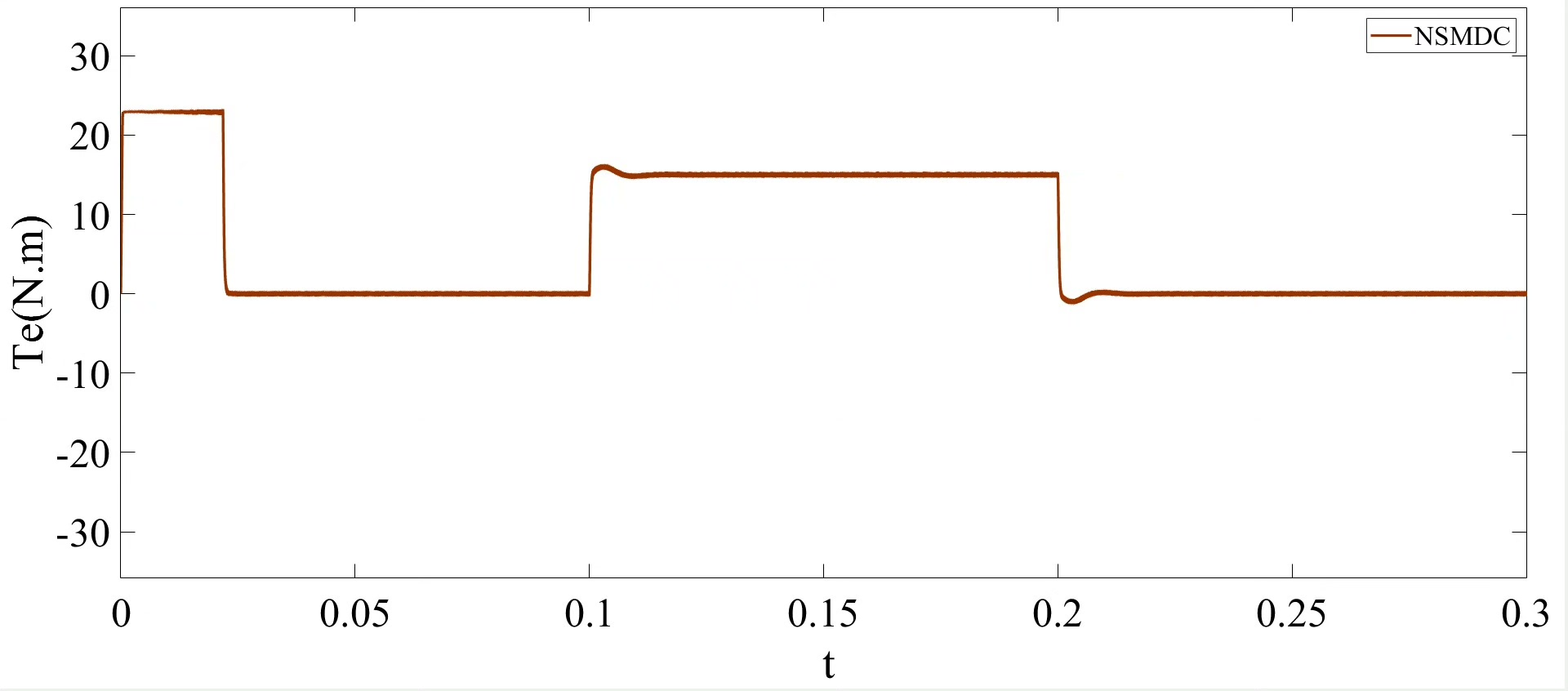
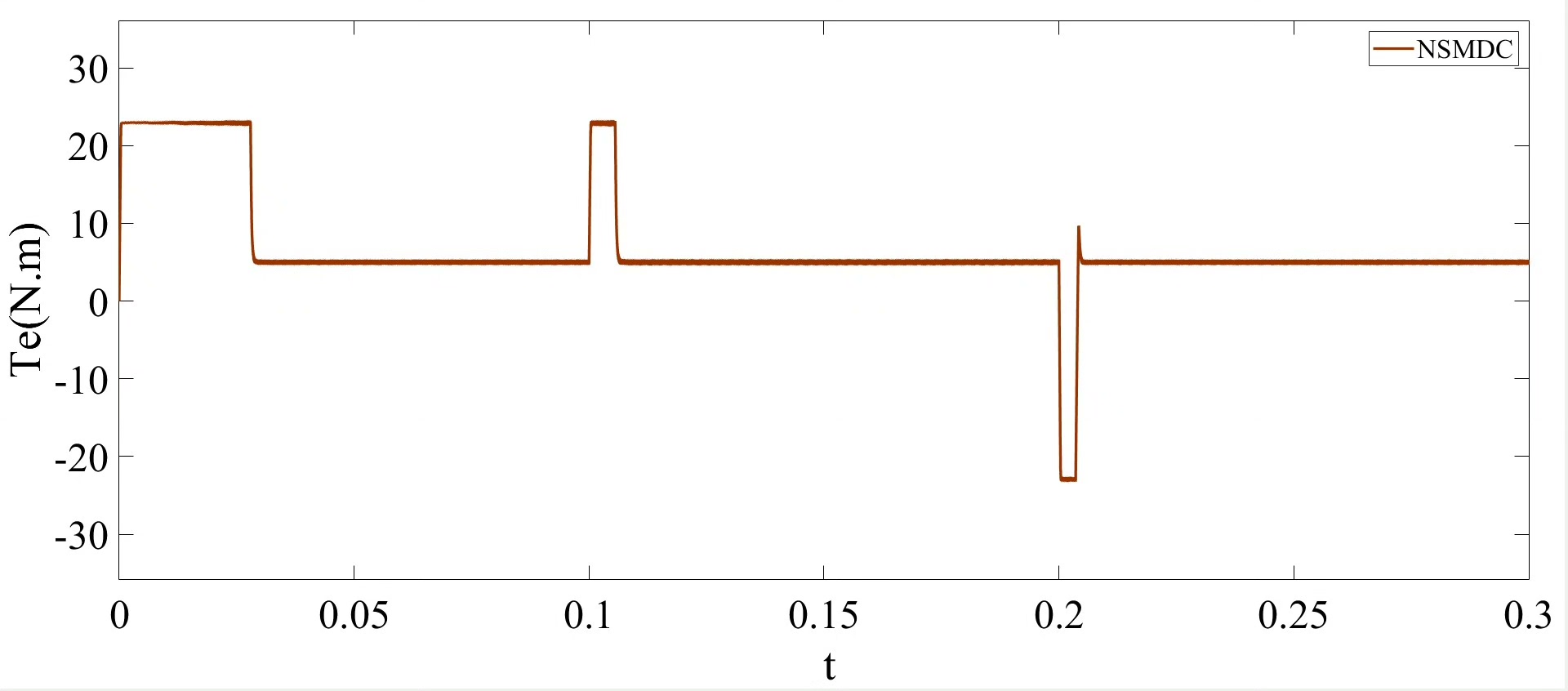
对于PMSM的电流环控制,本文采用了DBCC算法。DBCC是一种无差拍电流预测控制方法,它通过对电流误差的预测,实现对电流环的控制。DBCC的核心思想是根据电流的理论变化趋势,通过预测电流误差将来的值并加以补偿,从而实现对电流环的控制。DBCC能够有效减小电流环的响应时间,提高系统的动态性能。
为了验证NSMDO和DBCC的控制策略在PMSM控制中的性能,本文进行了一系列的仿真实验。在仿真中,所使用的电机参数是一致的,以确保实验结果的可比性。通过与传统的PI控制算法进行对比,实验结果表明,采用NSMDO和DBCC的控制策略能够显著提高系统的响应速度和控制精度。
总之,本文介绍了一种结合NSMDO和DBCC的控制策略在PMSM控制中的应用。实验结果表明,该控制策略能够显著提高系统的性能和控制精度。本文所使用的电机参数一致,保证了实验结果的可比性。在未来的研究中,可以进一步探索该控制策略在实际应用中的可行性,并对其进行优化和改进。
以上相关代码,程序地址:http://fansik.cn/769082597777.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









