







多项式轨迹–三次轨迹
1.4 Cubic trajectory
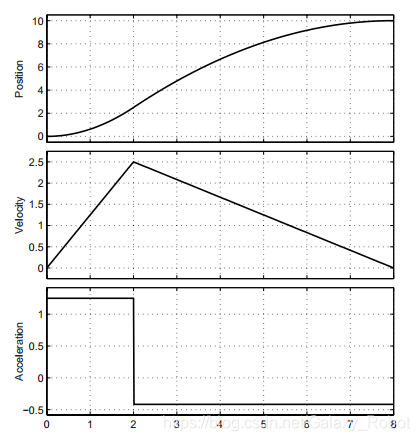
图 3 三次多项式轨迹
一旦指定了
t
0
,
t
1
{{t}_{0}},{{t}_{1}}
t0,t1时刻的位置和速度的值
(
q
0
,
q
1
v
0
,
v
1
)
\left({{q}_{0}},{{q}_{1}}{{v}_{0}},{{v}_{1}} \right)
(q0,q1v0,v1) ,那么有四个条件需要满足,所以必须使用三次多项式
q
(
t
)
=
a
0
+
a
1
(
t
−
t
0
)
+
a
2
(
t
−
t
0
)
2
+
a
3
(
t
−
t
0
)
3
,
t
0
≤
t
≤
t
1
(1-21)
q\left(t \right)={{a}_{0}}+{{a}_{1}}\left( t-{{t}_{0}} \right)+{{a}_{2}}{{\left(t-{{t}_{0}} \right)}^{2}}+{{a}_{3}}{{\left( t-{{t}_{0}}\right)}^{3}},{{t}_{0}}\le t\le {{t}_{1}} \tag{1-21}
q(t)=a0+a1(t−t0)+a2(t−t0)2+a3(t−t0)3,t0≤t≤t1(1-21)
根据给定条件,可求得四个系数分别为
{
a
0
=
q
0
a
1
=
v
0
a
2
=
3
h
−
(
2
v
0
+
v
1
)
T
T
2
a
3
=
−
2
h
+
(
v
0
+
v
1
)
T
T
3
a
0
=
q
0
a
1
=
v
0
a
2
=
3
h
−
(
2
v
0
+
v
1
)
T
T
2
a
3
=
−
2
h
+
(
v
0
+
v
1
)
T
T
3
(1-22)
\begin{cases} \begin{matrix} {{a}_{0}}&=&{{q}_{0}} \\ {{a}_{1}}&=&{{v}_{0}} \\ {{a}_{2}}&=&\frac{3h-\left( 2{{v}_{0}}+{{v}_{1}} \right)T}{{{T}^{2}}} \\ {{a}_{3}}&=&\frac{-2h+\left( {{v}_{0}}+{{v}_{1}} \right)T}{{{T}^{3}}} \\ {{a}_{0}}&=& {{q}_{0}} \\ {{a}_{1}}&=& {{v}_{0}} \\ {{a}_{2}}&=& \frac{3h-\left( 2{{v}_{0}}+{{v}_{1}} \right)T}{{{T}^{2}}} \\ {{a}_{3}}&=& \frac{-2h+\left( {{v}_{0}}+{{v}_{1}} \right)T}{{{T}^{3}}} \\ \end{matrix} \end{cases} \tag{1-22}
⎩⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎧a0a1a2a3a0a1a2a3========q0v0T23h−(2v0+v1)TT3−2h+(v0+v1)Tq0v0T23h−(2v0+v1)TT3−2h+(v0+v1)T(1-22)
通过使用这个结果,可很容易计算出n个点的序列的速度连续的轨迹。整个运动可分为n-1段,每段连接了时刻
t
k
{{t}_{k}}
tk 和
t
k
+
1
{{t}_{k+1}}
tk+1 对应的点
q
k
{{q}_{k}}
qk 和
q
k
+
1
{{q}_{k+1}}
qk+1 ,并且分别具有起始速度和终点速度
v
k
,
v
k
+
1
{{v}_{k}},{{v}_{k+1}}
vk,vk+1。上式可以用来定义这些曲线段的4(n-1)个参数
a
0
k
,
a
1
k
,
a
2
k
,
a
3
k
{{a}_{0}}_{k},{{a}_{1k}},{{a}_{2k}},{{a}_{3k}}
a0k,a1k,a2k,a3k 。
Example2.6:(a) t 0 = 0 , t 1 = 8 , q 0 = 0 , q 1 = 10 , v 0 = v 1 = 0 {{t}_{0}}=0,{{t}_{1}}=8,{{q}_{0}}=0,{{q}_{1}}=10,{{v}_{0}}={{v}_{1}}=0 t0=0,t1=8,q0=0,q1=10,v0=v1=0
(b) t 0 = 0 , t 1 = 8 , q 0 = 0 , q 1 = 10 , v 0 = − 5 , v 1 = − 10 {{t}_{0}}=0,{{t}_{1}}=8,{{q}_{0}}=0,{{q}_{1}}=10,{{v}_{0}}=-5,{{v}_{1}}=-10 t0=0,t1=8,q0=0,q1=10,v0=−5,v1=−10
由(a)和(b)的条件确定的轨迹分别如下图所示
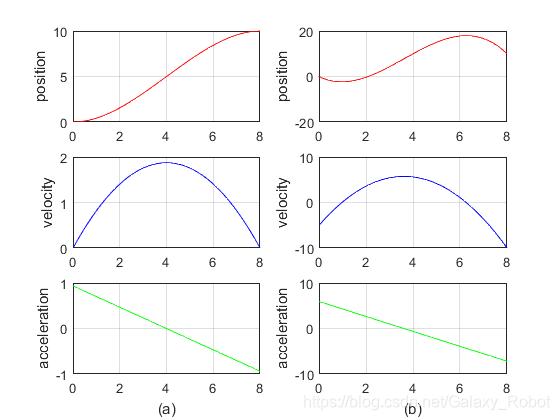
图 4 Example 2.6
matlab仿真代码参见examplesCode文件夹下的example2_6.m文件
%example2.6
clc
clear
%轨迹定义条件
%时间
t0=0;
t1=8;
%位置和速度(a)
q0=0;
q1=10;
v0=0;
v1=0;
%利用公式(1-22)求系数
h=q1-q0;
T=t1-t0;
a0=q0;
a1=v0;
a2=(3*h-(2*v0+v1)*T)/(T*T);
a3=(-2*h+(v0+v1)*T)/(T*T*T);
%轨迹生成
t=t0:0.1:t1;
%位置
q=a0+a1*power((t-t0),1)+a2*power((t-t0),2)+a3*power((t-t0),3);
%速度
v=a1+2*a2*power((t-t0),1)+3*a3*power((t-t0),2);
%加速度
acc=2*a2+6*a3*power((t-t0),1);
%绘图
subplot(3,2,1)
plot(t,q,'r');
ylabel('position')
grid on
subplot(3,2,3)
plot(t,v,'b');
ylabel('velocity')
grid on
subplot(3,2,5)
plot(t,acc,'g');
xlabel('(a)');
ylabel('acceleration')
grid on
%时间
t0=0;
t1=8;
%位置和速度(b)
q0=0;
q1=10;
v0=-5;
v1=-10;
%利用公式(1-22)求系数
h=q1-q0;
T=t1-t0;
a0=q0;
a1=v0;
a2=(3*h-(2*v0+v1)*T)/(T*T);
a3=(-2*h+(v0+v1)*T)/(T*T*T);
%轨迹生成
t=t0:0.1:t1;
%位置
q=a0+a1*power((t-t0),1)+a2*power((t-t0),2)+a3*power((t-t0),3);
%速度
v=a1+2*a2*power((t-t0),1)+3*a3*power((t-t0),2);
%加速度
acc=2*a2+6*a3*power((t-t0),1);
%绘图
subplot(3,2,2)
plot(t,q,'r');
ylabel('position')
grid on
subplot(3,2,4)
plot(t,v,'b');
ylabel('velocity')
grid on
subplot(3,2,6)
plot(t,acc,'g');
xlabel('(b)');
ylabel('acceleration')
grid on
Example 2.7 :由多个点定义的运动轨迹
t
0
=
0
,
t
1
=
2
,
t
2
=
4
,
t
3
=
8
,
t
4
=
10
,
q
0
=
10
,
q
1
=
20
,
q
2
=
0
,
q
3
=
30
,
q
4
=
40
,
v
0
=
0
,
v
1
=
−
10
,
v
2
=
10
,
v
3
=
3
,
v
4
=
0.
\begin{matrix} &{{t}_{0}}=0,{{t}_{1}}=2,{{t}_{2}}=4,{{t}_{3}}=8,{{t}_{4}}=10, \\ & {{q}_{0}}=10,{{q}_{1}}=20,{{q}_{2}}=0,{{q}_{3}}=30,{{q}_{4}}=40,\\ &{{v}_{0}}=0,{{v}_{1}}=-10,{{v}_{2}}=10,{{v}_{3}}=3,{{v}_{4}}=0. \\ \end{matrix}
t0=0,t1=2,t2=4,t3=8,t4=10,q0=10,q1=20,q2=0,q3=30,q4=40,v0=0,v1=−10,v2=10,v3=3,v4=0.
利用式确定系数,然后求导得到速度和加速的表达式。example 2.7确定的轨迹如下图所示。
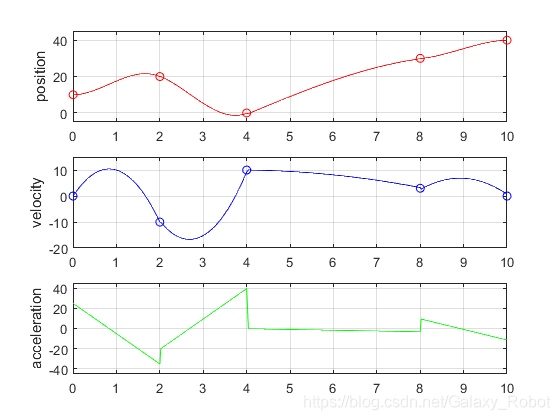
图 5 给定多个点确定的轨迹
matlab仿真代码参见examplesCode文件夹下的example2_7.m文件
%example2.7
clc
clear
%轨迹定义条件
t_array=[0,2,4,8,10];
q_array=[10,20,0,30,40];
v_array=[0,-10,10,3,0];
%计算轨迹
%初始位置
t=t_array(1);
q=q_array(1);
v=v_array(1);
%计算各段轨迹
for k=1:length(t_array)-1
%计算各段多项式的系数
h(k)=q_array(k+1)-q_array(k);
T(k)=t_array(k+1)-t_array(k);
a0(k)=q_array(k);
a1(k)=v_array(k);
a2(k)=(3*h(k)-(2*v_array(k)+v_array(k+1))*T(k))/(T(k)*T(k));
a3(k)=(-2*h(k)+(v_array(k)+v_array(k+1))*T(k))/(T(k)*T(k)*T(k));
%生成各段轨迹密化的数据点
%局部时间坐标
tau=t_array(k):T(k)/100:t_array(k+1);
%全局时间坐标,由局部时间坐标组成
t=[t,tau(2:end)];
%局部位置坐标
qk=a0(k)+a1(k)*power(tau-tau(k),1)+a2(k)*power(tau-tau(k),2)+a3(k)*power(tau-tau(k),3);
%全局位置坐标
q=[q,qk(2:end)];
%速度
vk=a1(k)+2*a2(k)*power(tau-tau(k),1)+3*a3(k)*power(tau-tau(k),2);
v=[v,vk(2:end)];
%加速度
acck=2*a2(k)+6*a3(k)*power(tau-tau(k),1);
if(k==1)
acc=2*a2(k);
end
acc=[acc,acck(2:end)];
end
%绘图
subplot(3,1,1);
h1=plot(t,q,'-r');
legend(h1,'第一种方式')
hold on;
plot(t_array,q_array,'or');
axis([0,10,-5,45]);
ylabel('position')
grid on;
subplot(3,1,2);
plot(t_array,v_array,'ob');
hold on;
plot(t,v,'b');
axis([0,10,-20,15]);
ylabel('velocity')
grid on;
subplot(3,1,3);
plot(t,acc,'g');
hold on
axis([0,10,-45,45]);
ylabel('acceleration')
grid on;
通过一系列点
q
0
,
q
1
,
⋯
,
q
n
{{q}_{0}},{{q}_{1}},\cdots,{{q}_{n}}
q0,q1,⋯,qn 定义轨迹时,中间点的速度并不总是满足指定的速度。这时中间点可根据直观判断确定合适的速度值,例如
v
0
(
a
s
s
i
g
n
e
d
)
v
k
=
{
0
,
s
i
g
n
(
d
k
)
≠
s
i
g
n
(
d
k
+
1
)
1
2
(
d
k
+
d
k
+
1
)
,
s
i
g
n
(
d
k
)
=
s
i
g
n
(
d
k
+
1
)
v
n
(
a
s
s
i
g
n
e
d
)
(1-23)
\begin{matrix} & {{v}_{0}}\left( assigned \right) \\ & {{v}_{k}}= \begin{cases} \begin{matrix} 0, &sign\left( {{d}_{k}} \right)\ne sign\left( {{d}_{k+1}} \right) \\ \frac{1}{2}\left( {{d}_{k}}+{{d}_{k+1}} \right), &sign\left( {{d}_{k}}\right)=sign\left( {{d}_{k+1}} \right) \\ \end{matrix} \\ \end{cases}\\ & {{v}_{n}}\left( assigned \right) \\ \end{matrix} \tag{1-23}
v0(assigned)vk={0,21(dk+dk+1),sign(dk)=sign(dk+1)sign(dk)=sign(dk+1)vn(assigned)(1-23)
这里
d
k
=
(
q
k
−
q
k
−
1
)
/
(
t
k
−
t
k
-
1
)
{{d}_{k}}=\left({{q}_{k}}-{{q}_{k-1}} \right)/\left( {{t}_{k}}-{{t}_{k\text{-}1}} \right)
dk=(qk−qk−1)/(tk−tk-1) ,
s
i
g
n
(
⋅
)
sign\left( \cdot \right)
sign(⋅) 是函数的符号。
Example2.8:把Example2.7的给定点按照确定中间点的速度值,那么确定的轨迹如下图(虚线)所示。可见第二种方式中间点速度不等于指定点的速度。一般情况下不会指定中间点的速度,只指定起点和终点的速度,这时候就可以使用第二方式规划轨迹。有时候定义轨迹时,指定的中间点的速度不合理,会导致速度曲线波动过大,这是时候如果不要求中间位置的速度都必须与指定相等,也可以使用第二种规划方式。
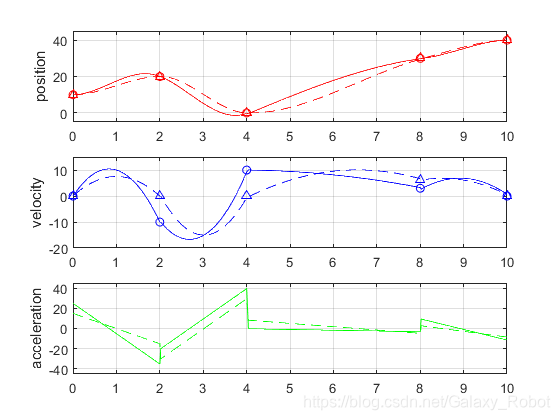
图 6 中间点的速度不一定等于指定速度
matlab仿真代码参见examplesCode文件夹下的example2_8.m文件
%example2.8
clc
clear
%轨迹定义条件
t_array=[0,2,4,8,10];
q_array=[10,20,0,30,40];
v_array=[0,-10,10,3,0];
%计算轨迹
%初始位置
t=t_array(1);
q=q_array(1);
v=v_array(1);
v_array2=v_array;
for k=1:length(t_array)-1
%按照式(1-23)式确定中间点的速度值
if(k>1)
dk1=(q_array(k)-q_array(k-1))/(t_array(k)-t_array(k-1));
dk2=(q_array(k+1)-q_array(k))/(t_array(k+1)-t_array(k));
if((dk2>=0 && dk1>=0) || (dk2<=0 && dk1<=0))
v_array2(k)=1.0/2.0*(dk1+dk2);
else
v_array2(k)=0;
end
end
end
%计算各段轨迹
for k=1:length(t_array)-1
%计算各段多项式的系数
h(k)=q_array(k+1)-q_array(k);
T(k)=t_array(k+1)-t_array(k);
a0(k)=q_array(k);
a1(k)=v_array2(k);
a2(k)=(3*h(k)-(2*v_array2(k)+v_array2(k+1))*T(k))/(T(k)*T(k));
a3(k)=(-2*h(k)+(v_array2(k)+v_array2(k+1))*T(k))/(T(k)*T(k)*T(k));
%生成各段轨迹密化的数据点
%局部时间坐标
tau=t_array(k):T(k)/100:t_array(k+1);
%全局时间坐标,由局部时间坐标组成
t=[t,tau(2:end)];
%局部位置坐标
qk=a0(k)+a1(k)*power(tau-tau(k),1)+a2(k)*power(tau-tau(k),2)+a3(k)*power(tau-tau(k),3);
%全局位置坐标
q=[q,qk(2:end)];
%速度
vk=a1(k)+2*a2(k)*power(tau-tau(k),1)+3*a3(k)*power(tau-tau(k),2);
v=[v,vk(2:end)];
%加速度
acck=2*a2(k)+6*a3(k)*power(tau-tau(k),1);
if(k==1)
acc=2*a2(k);
end
acc=[acc,acck(2:end)];
end
%绘图
subplot(3,1,1);
h2=plot(t,q,'--r');
legend(h2,'第二种方式')
hold on;
plot(t_array,q_array,'^r');
axis([0,10,-5,45]);
ylabel('position')
grid on;
subplot(3,1,2);
plot(t_array,v_array2,'^b');
hold on;
plot(t,v,'--b');
axis([0,10,-20,15]);
ylabel('velocity')
grid on;
subplot(3,1,3);
plot(t,acc,'--g');
axis([0,10,-45,45]);
ylabel('acceleration')
grid on;
小结
前面所述的三次多项式实际是速度规划里面常说的PVT算法。PVT 模 式 是 指 位 置 — 速 度 — 时 间(Position-Velocity-Time)模式。PVT模式是一种简单又有效的运动控制模式,用户只需要给定离散点的位置、速度和时间,运动控制卡的插补算法将会生成一条连续、平滑的运动路径。
PVT 算法除了给定各数据点的“位置、速度、时间”之外,还可以通过其他形式给出参数。根据输入参数的不同,PVT 算法可分为 PVT 描述方式、Complete
描述方式、Percent 描述方式和 Continuous 描述方式。
前面所述的三次多项式实际是PVT描述方式,PVT描述方式直接给定各数据点的“位置、速度、时间”。一般使用多项式插值,若用三次多项式表示位移-时间关系,每两个相邻数据点可单独确定一个三次曲线。没有限制各段之间的衔接条件,不能保证各个点处速度曲线平滑过渡,因此不能保证加速度连续。其他描述方式后面会逐渐介绍。
参考文献
[1]Biagiotti L, Melchiorri C. Trajectory Planning for Automatic Machines and Robots[M]. Springer Berlin Heidelberg, 2009.
[2]东梁. 嵌入式运动控制器若干关键技术的研究与实现[D].2015.


















 1442
1442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











