







原创 | 文 BFT机器人
01
研究内容
这篇论文的研究内容是基于大脑启发的多模态混合神经网络,用于机器人地点识别。研究人员设计了一个名为NeuroGPR的系统,该系统可以模拟大脑的多模态感知机制,从传统和神经形态传感器中编码和整合多模态线索,以实现机器人的地点识别。为了实现这一目标,研究人员使用了多尺度液态状态机等多种神经网络模型,以异步融合多模态信息。研究结果表明,NeuroGPR在机器人地点识别方面表现出更好的性能和鲁棒性,具有广泛的应用前景。
02
论文原理
a.大脑启发的多模态感知机制
研究人员从大脑的多模态感知机制中获取灵,设计了一个基于大脑启发的多模态混合神经网络模型,用于机器人地点识别。该模型可以模拟大脑的多模态感知机制,从传统和神经形态传感器中编码和整合多模态线索,以实现机器人的地点识别。
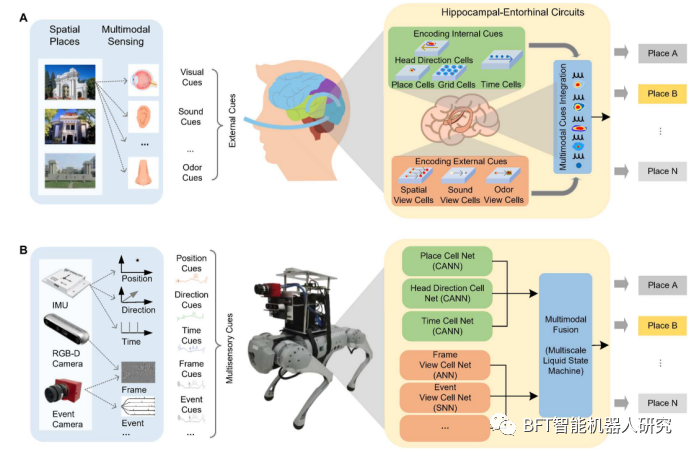
图1所示。人类和机器人的位置识别机制。
A)人类可以根据具有时空连续性的多态感觉线索来识别一个地方。位置由外部感觉织响和内部连接的时空细的给码。多通消的感觉线索可以共同激活这些细胞。联合放电模式可以唯一地编码和回忆一个特定的地方。
(B) 该机器人可以识别一个地方的大脑启发的地方识别系统,simiarlv的机器人可以使用多模态传感器获得环境的感官线索。一个部署在一个神经形态计算芯片上的mhnn模型被用来对这些感觉线索进行码,该模型可以用多时空尺度的融合方法对位置进行可第的识别。
b.多尺度液态状态机
研究人员引入了多尺度液态状态机等多种神经
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 618
618

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









