







各位读者朋友,大家好。本次打造的自动驾驶仿真系统,涉及感知,预测,规控等多个模块(以规控算法为主,包括Polynomial预测,MCTS决策算法,通行走廊Corridor构建,QP/CILQR轨迹生成求解器,LQR+PID的控制器等),同时也支持其它相关规控算法的扩展(部署&开发自身感兴趣的算法),非常便捷。笔者在该系列中开发的规控算法主要依据专栏《自动驾驶Planning决策规划》中的章节逐步搭建,后续实践系列涉及的博客包括但不局限于以下内容:
《自动驾驶---打造自动驾驶系统之环境准备(一)》---已更新
《自动驾驶---打造自动驾驶系统之定位模块开发(二)》---已更新
《自动驾驶---打造自动驾驶系统之导航模块开发(三)》---已更新
《自动驾驶---打造自动驾驶系统之参考线平滑(四)》---已更新
《自动驾驶---打造自动驾驶系统之感知环境开发(五)》---已更新
《自动驾驶---打造自动驾驶系统之预测模块开发(六)》
《自动驾驶---打造自动驾驶系统之决策模块开发(七)》
《自动驾驶---打造自动驾驶系统之轨迹生成模块开发(八) 》
《自动驾驶---打造自动驾驶系统之控制模块开发(九)》
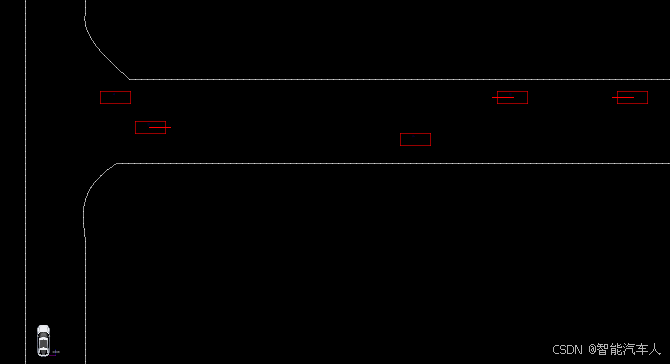
最终呈现的静态效果(无法直接贴视频)如下:

1 系统环境
笔者的环境是:Ubuntu 18.04 + ROS Melodic,当然18.04以上的环境也支持。
其它依赖库的安装参考之前的博客《自动驾驶---打造自动驾驶系统之环境准备(一)》,后续如果有遗漏,继续补充。
当然,如果各位读者朋友感兴趣或者在此过程中遇到相关问题,欢迎私信咨询!
2 Prediction模块
预测模块在自动驾驶中处于非常重要的一环,因为其决定了决策模块的可靠性。在非模型化的预测模块中,如果有车道,会以车道为牵引进行多项式的拟合,如果没有车道信息,只能通过其历史轨迹进行拟合。
当预测模块进入模型化之后,一切都变得“简单”了,其中包括单模预测和多模预测。
2.1 开发
关于预测模块,笔者之前也写过博客,如下几篇:
总体来说,前几年预测模块还是以多项式拟合为主(包括Apollo模块中),但随着模型技术的发展和应用,近两年的预测模块基本模型化,并且逐渐预测,决策,规划一体化。本篇博客主要介绍多项式拟合的预测方法,并用于仿真。
主要代码如下:
// predict traj of dynamic obstacles by curvefitting
// x,y: history pose
// degree: polynomial degree
Eigen::VectorXd Prediction::curveFitting(const Eigen::VectorXd& x, const Eigen::VectorXd& y, const int degree){
size_t n = x.size();
Eigen::MatrixXd A(n, degree + 1);
for (int i = 0; i < n; ++i){
for (int j = 0; j <= degree; ++j){
A(i, j) = pow(x(i), j);
}
}
Eigen::VectorXd result = A.householderQr().solve(y);
return result;
}2.2 效果
结合上一节的障碍物模拟,最终预测的效果如下(动态障碍物有预测轨迹,静态障碍物是没有预测轨迹的),由于设置的速度偏低, 因此预测的轨迹也偏短一些。


















 1013
1013

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











