






《无限暖暖》作为叠纸游戏旗下的最新作品,自研时间接近5年,游戏还没落地,预约量在上线前夕便已达到惊人的3000万,一经开启全球公测便迅速吸引了大量玩家的关注与喜爱。在公测开启后,更是成功登顶AppStore全球34个地区的免费榜,展现了其强大的市场号召力和玩家基础。
该游戏以其精美的画面、丰富的玩法元素以及深度的换装机制,为玩家们带来了全新的游戏体验,在陪同主人公苏暖暖探索奇迹大陆的过程中,能够充分体验到换装的乐趣和冒险的刺激。


暖暖系列到现在一共有5代游戏,从旧到新分别是一代【暖暖换装物语】二代【暖暖环游世界】三代【奇迹暖暖】四代【闪耀暖暖】以及目前新发行的第五代【无限暖暖】。
游戏背景发生地在奇迹大陆,这块大陆共有7个国家,每个国家有不同的文化历史背景和各自之间的纷争。7国可用服装风格和建筑风格来区分,分别是:亚洲风、甜美风、欧洲风、日常风、赛博朋克风、热带沙漠风以及极地风。





暖五《无限暖暖》的新手村在7国中的筑心王国--心愿原野地区,位于多国交界处,暖暖是童话里跑出来的小公主,是性格勇敢坚毅的绝美宝宝。游戏的核心玩法是收集服装、拍摄美照,穿好看、过主线,会有巨好看的特写,就像拍电影一样。

不过游戏画面及质感虽然好,却也对操作者的设备性能要求是极高,普通的手机平板这样的移动端设备以及办公学习常见的轻薄本很难获得高清、流畅、稳定的使用体验,效果上的折损不止一点半点。
然而专业的游戏本、高端硬件配置电脑价格动辄上万元,并非人人都有实力、有冲动能负担,如何同时满足畅玩及低门槛成为了很多人感到苦恼的问题;ToDesk云电脑则以其出色的性能和便捷的使用方式,成为众多玩家畅玩的新选择!
云电脑具有的优势?
ToDesk云电脑不依赖本地设备的配置,无论玩家使用的是手机、平板还是超低配置的电脑,都能通过它流畅地运行《无限暖暖》;这使得更多玩家能够跨越设备限制,享受到高品质的游戏体验。
获取方法也简单,通过ToDesk官网或自己移动端设备中的应用商店,即可分分钟完成安装及登录;所有系统设备都能用,例如Linux、鸿蒙、xp这样小众的都涵盖,借助Web版或者HD版都可行。

进入完成实名制认证后,在配置列表选择能够满足自己任务所需的机器配置,玩游戏建议选择高性能云电竞的高级配置版。显卡用的是RTX4070的、CPU是12核20线程的、内存是32GB、系统盘是249GB的,具体的信息在电脑参数明细位置都能查看的到;使用成本低至单小时个位数,对比去网吧租用或者购买新机真是又划算又省时了。

选择好配置及意向使用时长后,就可以在我的电脑模块中连接进入了,速度极快。
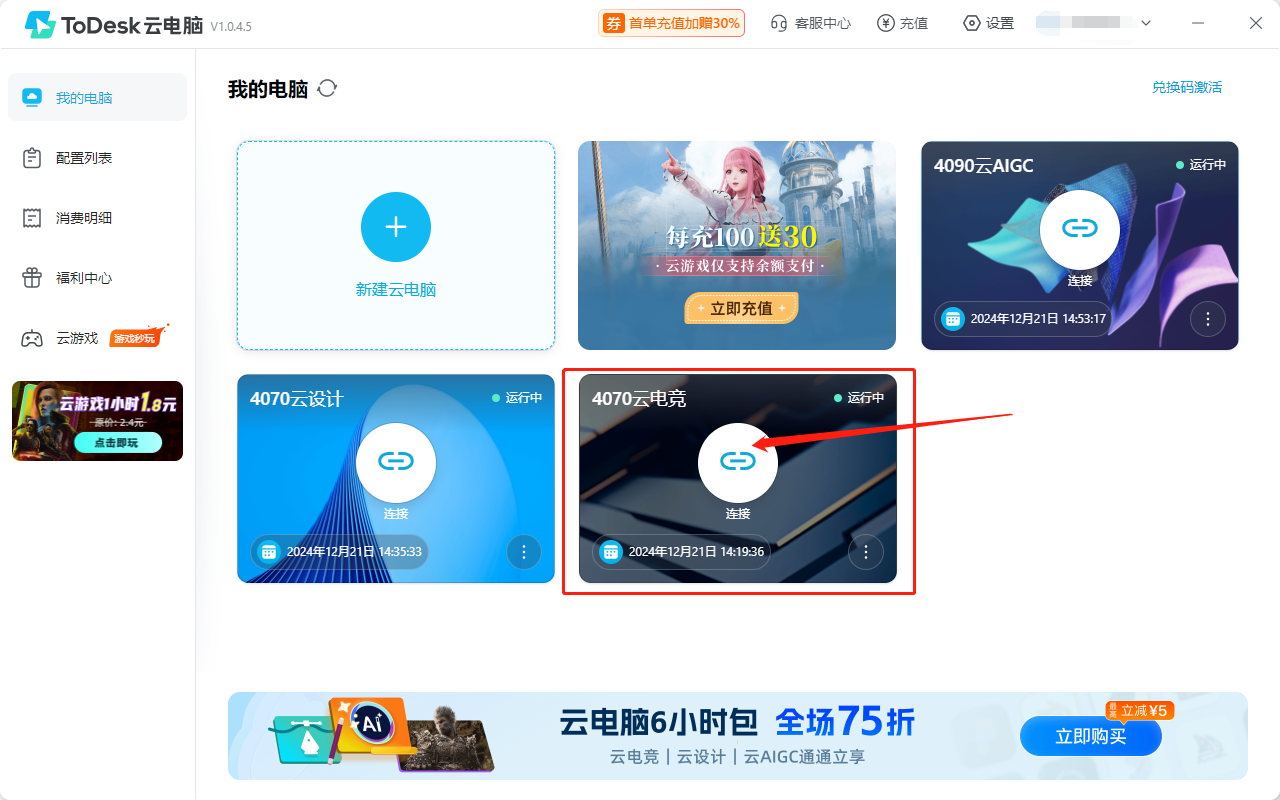
当然,如果是只想玩特定游戏,没有其他电脑使用需求的话,在云游戏这栏中也是同样可以丝滑开启的。
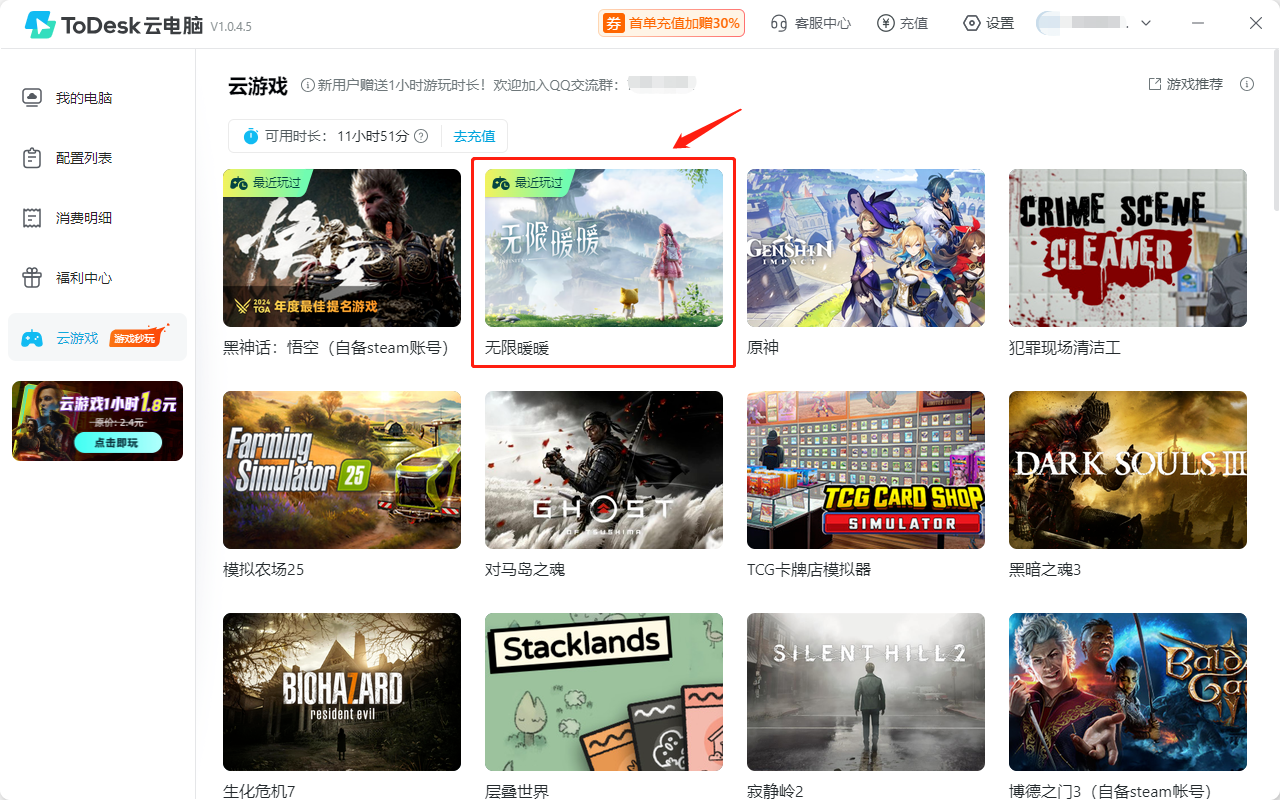
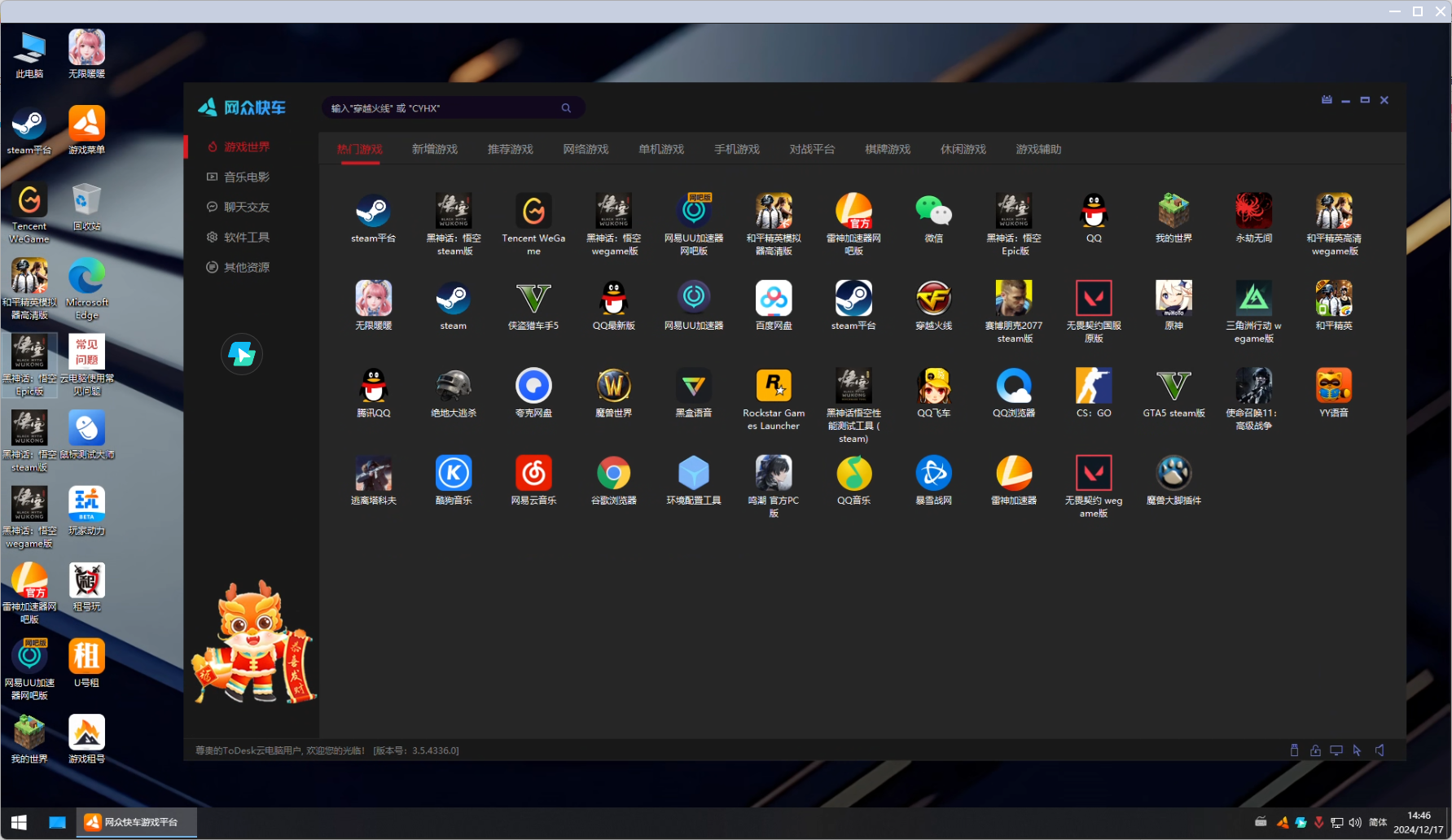
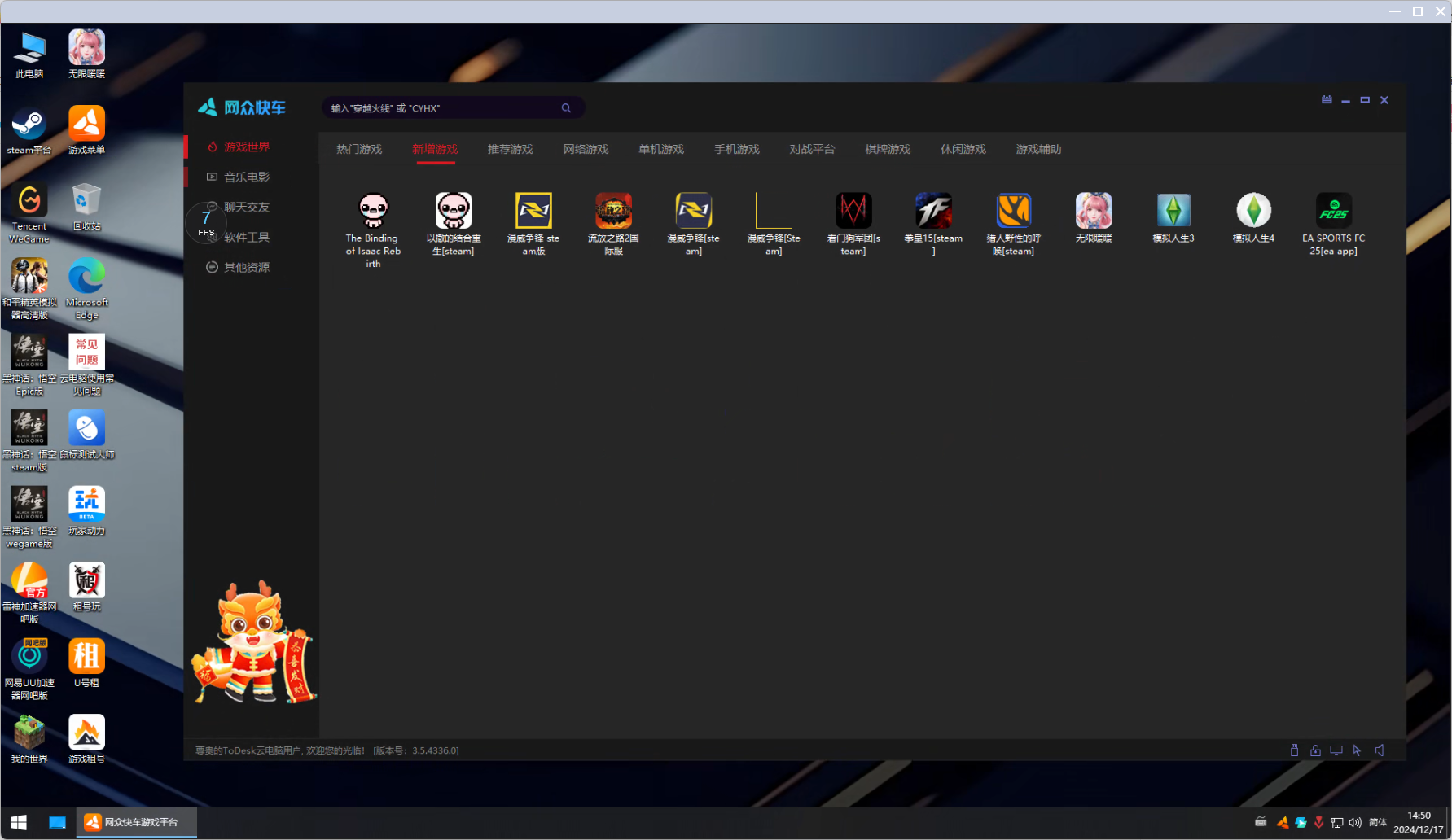
当选择云电竞电脑进入后,看到的就是正常的桌面了,已有海量常见应用预装在其中,游戏类别的游戏多,数量多达千百款,在橘色的游戏菜单APP中就能调取到。正流行的无限暖暖是已经额外放出来,即开即用,不占自身设备内存的同时也颇为省时省力。

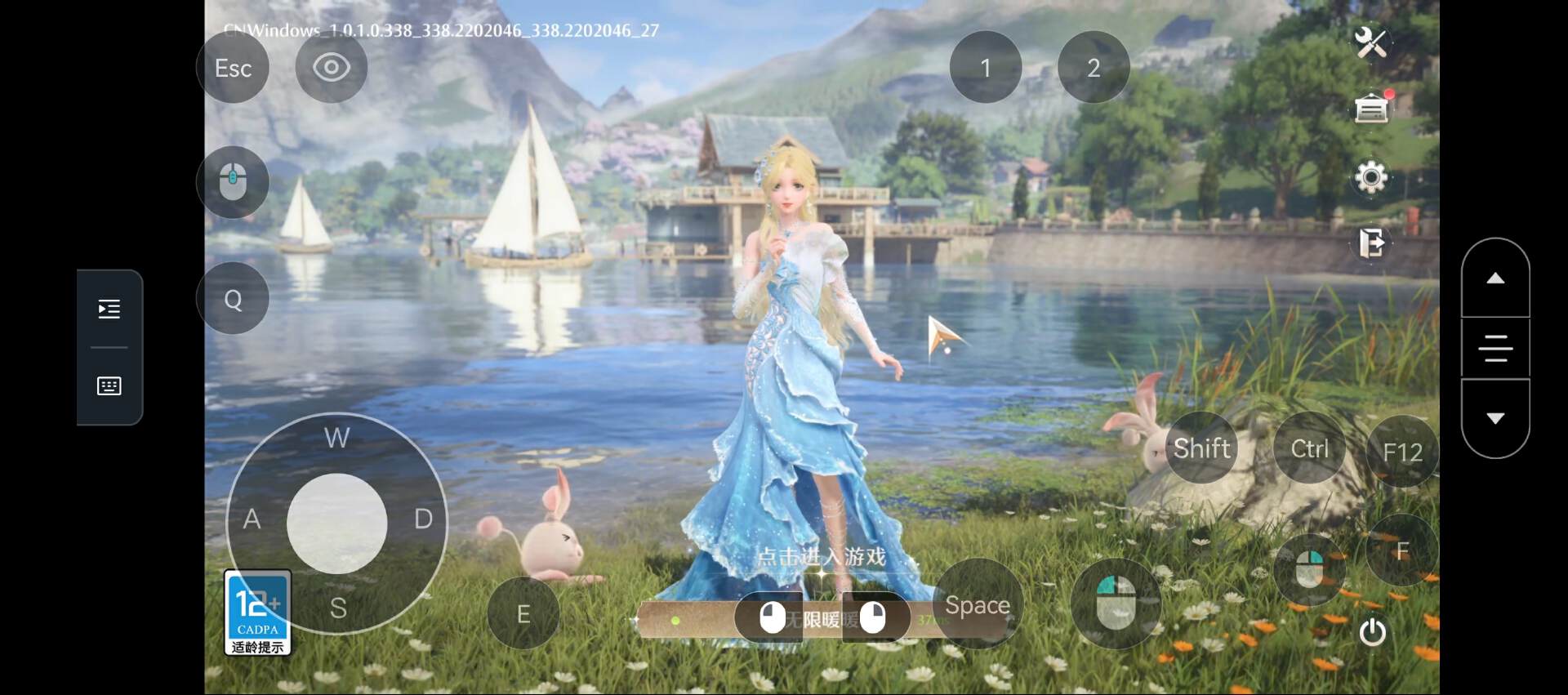
打开游戏后,发现教学手册内容还是蛮细致且全面的;仔细观看并牢记,后面正式畅玩便很顺。PC端的体验要比移动端的强很多,动作更加灵活精准,画面呈现出的内容也饱满。
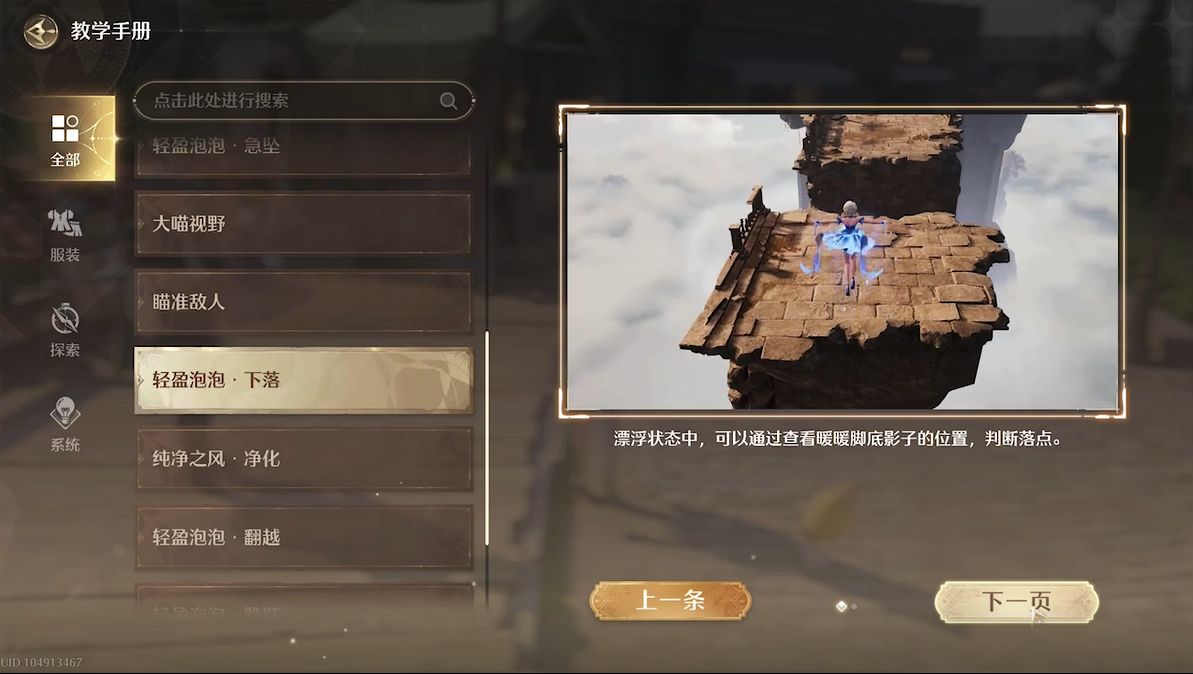
在ToDesk云电脑高性能配置的加持下,画质可以达到2k144帧,极为细腻流畅,几乎任何场景设计、服装造型细节都能有效还原到;而且还能适配手柄来畅玩,还能将制作好的照片一键传输保存在自己所用的设备中,实用功能好几项。




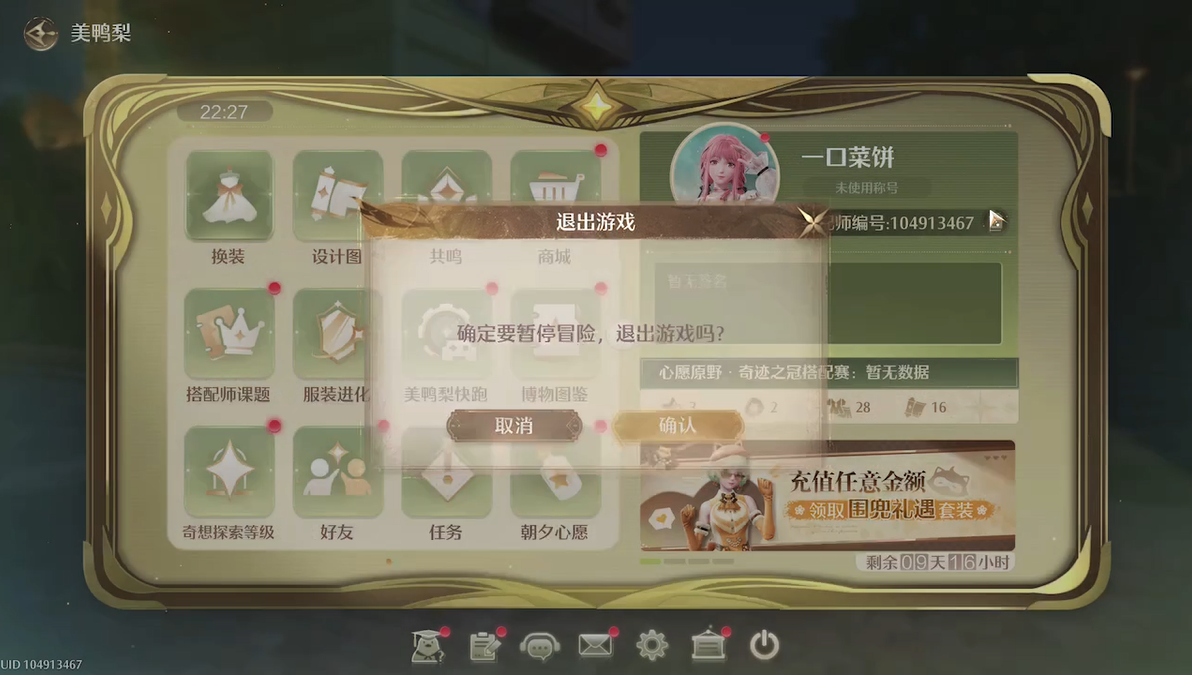
暖暖她是被爱向上托举,永不坠落,永远闪闪发光,是温暖勇敢又有力量的,是大女主。在奇幻的异想世界中能够忘却很多现实中的烦恼、暂时卸掉压力。
如果恰巧想要玩暖暖,但没有合适可用的设备在身边,那么不妨试试看新潮技术下应运而生的云电脑吧,既能解决问题,效果和成本又喜人,相信定是能够给广大玩家帮大忙~

















 323
323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









