







目录
1 参考资料
课程与ppt:移动机器人运动规划-深蓝学院 - 专注人工智能与自动驾驶的学习平台
代码链接:EGO-planner
2 前言
在机器人技术迅速发展的今天,自主导航已成为实现机器人智能化的关键技术之一。EGO planner作为一种先进的路径规划算法,在解决复杂环境下的机器人导航问题上展现出了卓越的能力。它特别适用于需要高精度避障和动态适应性的场景,如无人机、无人驾驶车辆等。本文旨在深入探讨EGO planner的核心原理、规划算法流程,并通过ROS(Robot Operating System)平台上的实际案例来展示其在仿真环境中的应用效果。希望通过本文能够让读者对EGO planner有更加全面而深刻的理解,并为相关领域的研究人员提供参考价值。
3 FAST-planner与EGO-planner
3.1 两算法的特点
前面已经介绍过FAST planner算法,FAST planner 强调快速响应和计算效率,在时间敏感的任务中表现出色。它利用高效的搜索算法来迅速生成路径,适合需要即时决策的应用场景。尽管FAST planner在速度上有优势,但在高度动态变化的环境中可能需要额外的调整以维持性能。
相比之下,EGO planner 专长于处理动态环境中的局部避障问题,通过结合全局路径规划与局部轨迹优化,能够在复杂场景下保持高效的安全性和路径质量。其自适应机制使得EGO planner能够灵活应对各种障碍物分布情况,增强了系统的鲁棒性。
3.2 两算法的对比
EGO planner是一种基于梯度的局部规划器,与FAST planner相比,最大的不同是它不依赖于ESDF,从而显著减少了计算时间。
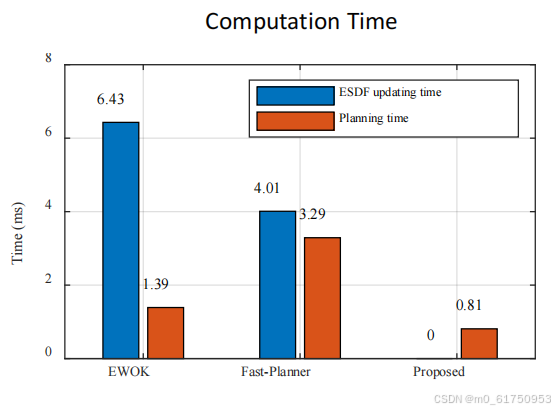
ESDF(欧几里得符号距离场)是一种栅格地图,其中每个格子存储着该格子到最近障碍物的距离。从下图右下角的柱状图可以看出,EWOK 和 Fast-Planner 算法都需要较长的时间来构建这个 ESDF 地图。相比之下,Ego Planner 算法则不需要构建 ESDF,从而显著缩短了规划时间。
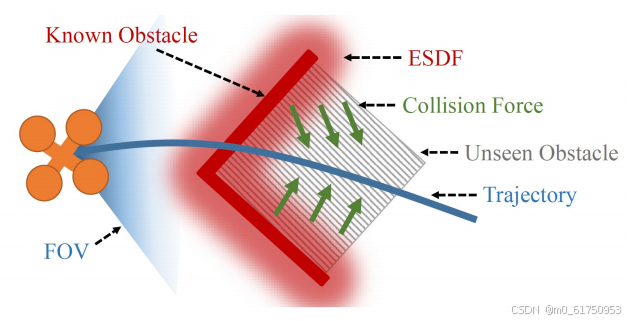
同时,在生成地图的过程中,系统仅能识别障碍物的表面,而无法感知到障碍物背后的区域或其内部结构,正如示例图所示。这意味着,在利用ESDF进行路径规划优化时,算法倾向于产生一条远离障碍物边缘的安全路径。然而,在某些情况下,比如当上方有障碍物将轨迹向下挤压,同时下方又有障碍物向上推挤时,可能会导致规划出的路径陷入障碍物之间,从而造成路径“卡住”的现象。因此,ESDF不仅面临构建耗时的问题,还存在着对于复杂避障场景处理不够灵活的局限性。
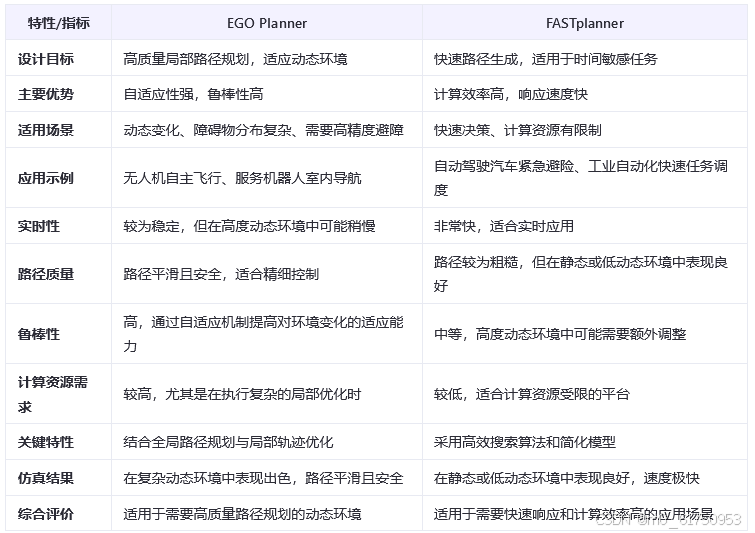
对两个算法进行比较可以得到下表:
4 EGO-plaanner框架
4.1 如何取代ESDF
EGO Planner不使用环境距离场
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 429
429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









