







 超级会员免费看
超级会员免费看
本文旨在通过本教程,在机械臂控制器版本的情况下,能够直接从零搭建一台可以用ros控制rokae机械臂的电脑。
电脑与机械臂环境
虚拟机 Ubuntu 20.04
机械臂本体 型号:xMateER7p
机械臂软件 界面:4.0.7.2033; 控制器: 1.7.0.5; 升级程序: 0.5.15
需要注意的是,这里的控制器版本如果不是1.7,高了低了似乎都不行,需要进行调整。
(记住这里的版本,后面要考!)
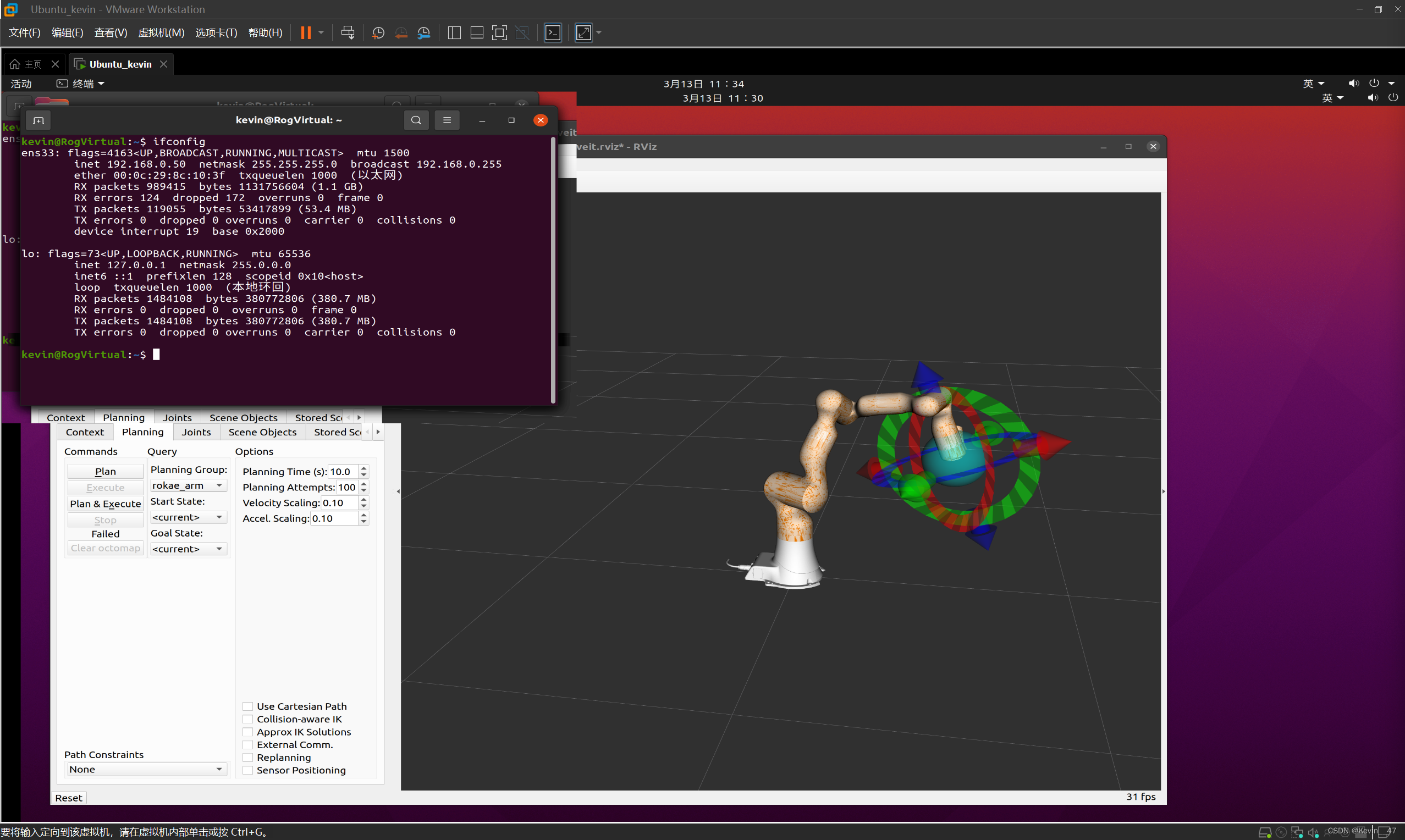
在虚拟机中的规划虽然都可以实现但是容易卡死(如下图所示),后面最好还是在物理机上进行操作。
整体流程
1. 安装ROS-Noetic版本;(内部测试可参考一键安装方法);
2. 安装Moveit;
3. 安装其他所需要的依赖包;

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 836
836











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









