







 文章介绍了机器人系统中相机作为重要传感器的角色,包括单目相机、双目相机和深度相机的工作原理和应用。单目相机无法直接获取深度信息,而双目相机通过两个相机的视角差计算深度。深度相机,如RGB-D相机,利用结构光或ToF技术测量物体深度。文章还提供了在树莓派上配置和测试USB摄像头的步骤,涉及ROS和相关软件的安装。
文章介绍了机器人系统中相机作为重要传感器的角色,包括单目相机、双目相机和深度相机的工作原理和应用。单目相机无法直接获取深度信息,而双目相机通过两个相机的视角差计算深度。深度相机,如RGB-D相机,利用结构光或ToF技术测量物体深度。文章还提供了在树莓派上配置和测试USB摄像头的步骤,涉及ROS和相关软件的安装。
相机是机器人系统中另一比较重要的传感器,与雷达类似的,相机也是机器人感知外界环境的重要手段之一,并且随着机器视觉、无人驾驶等技术的兴起,相机在物体识别、行为识别、SLAM中等都有着广泛的应用。
根据工作原理的差异可以将相机大致划分成三类:单目相机、双目相机与深度相机。
1.单目相机
单目相机是将三维世界二维化,它是将拍摄场景在相机的成像平面上留下一个投影,静止状态下是无法通过单目相机确定深度信息。向如下动图展示的一样,在二维图形中,甚至不能根据图片中物体的大小来判断物体距离。
2.双目相机
识破上面的“骗局”只需要移动单目相机,再换一个角度拍摄一张照片即可,当角度切换后,可以将两张照片组合还原为一个立体的三维世界。
双目相机的原理也是如此,双目相机是由两个单目相机组成的,即便在静止状态下,也可以生成两张图片,两个单目相机之间存在一定的距离也称之为基线,通过这个基线以及两个单目项目分别生成的图片,可以来估算每个象素的空间位置。
3.深度相机
深度相机也称之为RGB-D相机,顾名思义,深度相机也可以用于获取物体深度信息。深度相机一般基于结构光或ToF(Time-of-Flight)原理实现测距。
前者是通过近红外激光器,将具有一定结构特征的光线投射到被拍摄物体上,再由专门的红外摄像头进行采集。光线照射到不同深度的物体上时,会采集到不同的图像相位信息,然后通过运算单元将这种结构的变化换算成深度信息,后者实现则类似于激光雷达,也是根据光线的往返时间来计算深度信息。
使用流程如下:
硬件准备;
软件安装;
启动并测试。
1.硬件准备
当前直接连接树莓派即可,如果连接的是虚拟机,注意VirtualBox或VMware的相关设置。
2.软件准备
安装USB摄像头软件包,命令如下:
sudo apt-get install ros-ROS版本-usb-cam或者也可以从 github 直接下载源码:
git clone https://github.com/ros-drivers/usb_cam.git3.测试
1.launch文件准备
在软件包中内置了测试用的launch文件,内容如下:
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>节点 usb_cam 用于启动相机,节点 image_view 以图形化窗口的方式显示图像数据,需要查看相机的端口并修改 usb_cam 中的 video_device 参数,并且如果将摄像头连接到了树莓派,且通过 ssh 远程访问树莓派的话,需要注释 image_view 节点,因为在终端中无法显示图形化界面。
2.启动launch文件
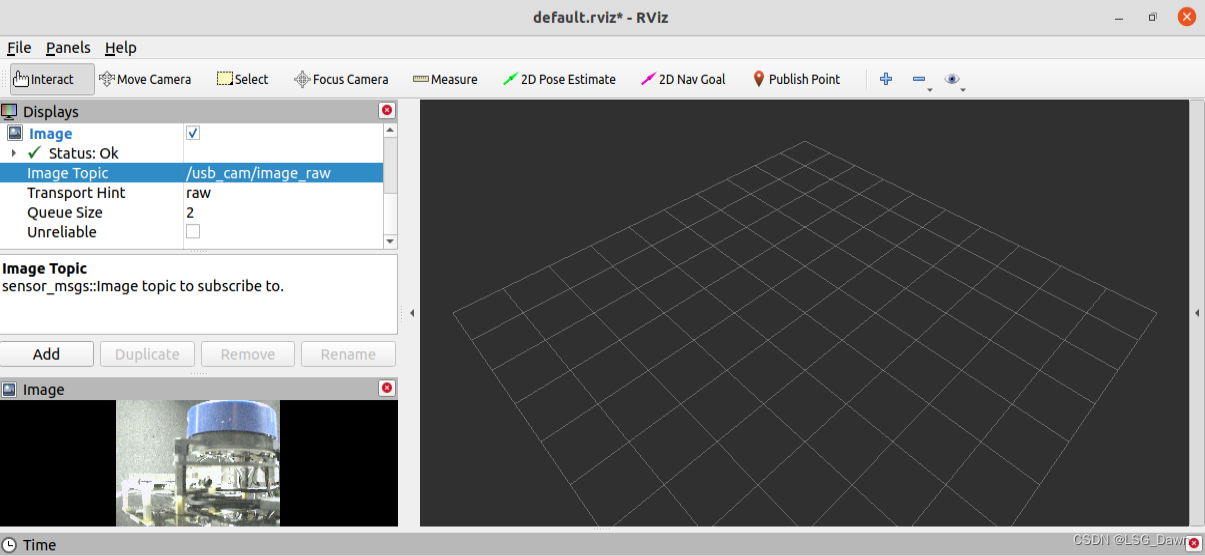
roslaunch usb_cam usb_cam-test.launch3.rviz显示
启动 rviz,添加 LaserScan 插件:

















 1737
1737

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









