






一、PX4配置
1.参数设置,保存重启后生效
EKF2_AID_MASK= 24
EKF2_HGT_MODE = 2

二、VRPN配置
1.Nokov动捕软件正确配置参数并启动VRPN
2.使用vrpn_client_ros 获取动捕数据,例如
roslaunch vrpn_client_ros sample.launch server:=10.1.1.198
三、测试
1.话题转发(假定待传输刚体名称为Tracker0)
rosrun topic_tools relay /vrpn_client_node/Tracker0/pose /mavros/vision_pose/pose
2.QGC增加监听14557端口
ApplicationSettings -> 通讯连接 -> 添加新的连接

3.启动MavRos (使用usb串口连接)
sudo apt install ros-melodic-mavros
roslaunch mavros px4.launch gcs_url:="udp://@127.0.0.1:14557"
具体参数说明请查阅:mavros - ROS Wiki
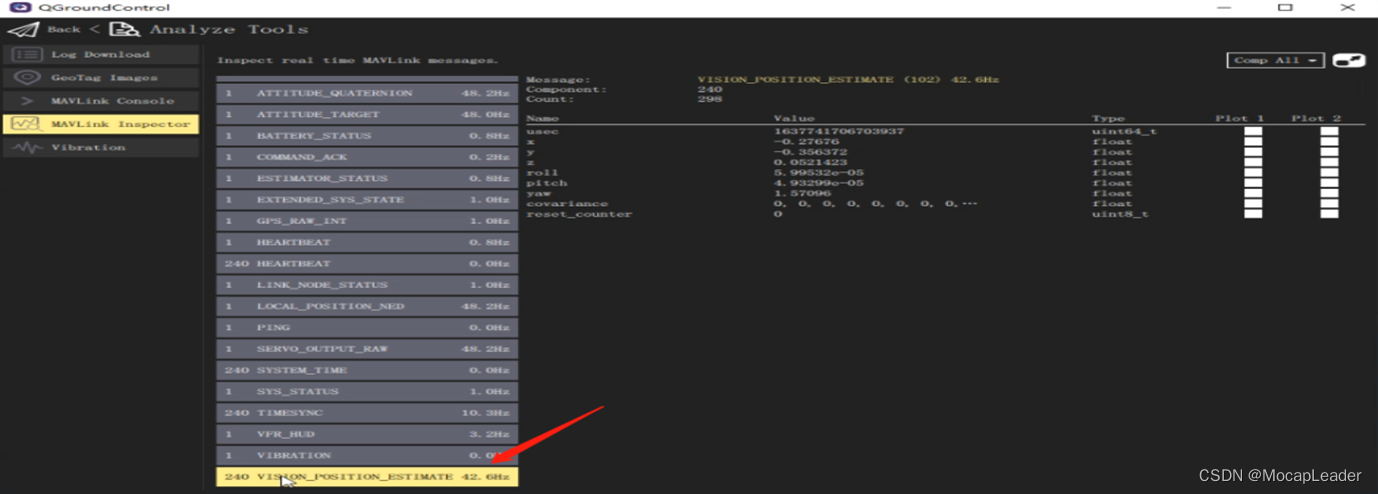
4.查看动捕数据
AnalyzeTools -> MAVLINK Inspector -> VISION_POSITION_ESTIMATE
可以观察到刚体的位移以及旋转信息,xyz roll pitch yaw















 1180
1180











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









