







Reactive Nonholonomic Trajectory Generation via Parametric Optimal Control
Alonzo Kelly
Bryan Nagy
目录
1. 车辆的运动模型
-
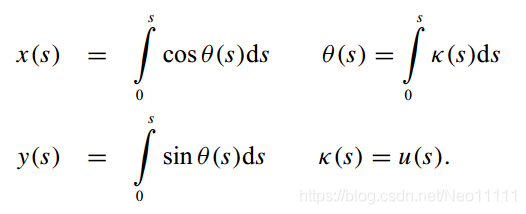
车辆运动描述

-
车辆状态

-
控制输入–决定速度和曲率变化
-
换元得到距离s的函数
2. 轨迹最优化问题
给定起点、目标点的状态(包括位姿、曲率,也可以包括速度)等,找到一个合适的控制输入,产生相应的轨迹,且轨迹需要满足动态模型的约束、且不触碰障碍物。这样的控制输入可能不存在,也可能存在,甚至存在多个,那么需要从多个合乎要求的控制输入中找到最优控制。
3. 最优化控制公式
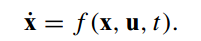
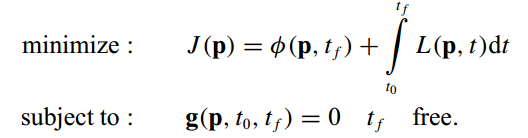
- 非线性系统运动方程
- 评估函数,可以看出它与末状态及整条路径的情况有关,我们的最优化问题实际上是使J函数最小化

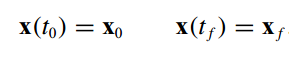
- 起点和目标点需要满足的约束
- 控制输入有界,其变化速度也有界,约束如下

4. 问题转化–服从约束条件的最优解
-
引入参数p,p为和轨迹形状相关的一系列参数,那么它自然将决定各时刻的控制输入,即
-
由于控制u将决定状态x,且二者共同决定 x ˙ \dot x x˙,那么此时 x ˙ \dot x x˙将由参数p决定

-
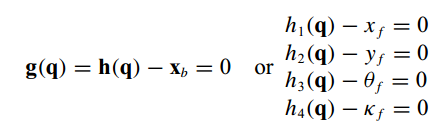
将起点与目标点(甚至可以使轨迹上的一系列指定要到达的点)称为边界状态,由初始状态加上 x ˙ \dot x x˙的积分得到,其值需要与我们的要求(表示为 x b , x_b, xb,向量)相等
-
将上式变形如下,得到边界条件约束的标准形式

-
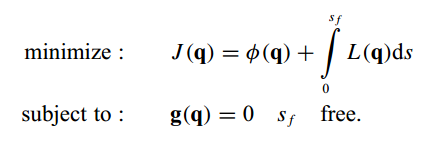
那么轨迹最优化可以公式化描述如下,即服从g=0约束条件下的J函数最小化问题(且参数p有界)
-
换元,q是包含p和s的向量,进一步地,上述最优化公式可以写为
5. 拉格朗日乘数法求解–有约束条件的多元函数极值
-
用J和约束g构造构造拉格朗日函数

-
极值条件需要满足H对q和λ的偏导数之和=0

-
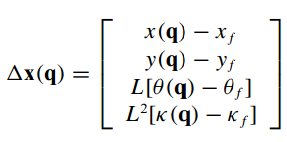
上式变形(f(x)=0=>f(x)+f’(x)△x=0)

-
矩阵形式

-
实际上相当于令J对q的偏导数和g对q的偏导数分别=0,前者体现无约束条件的最优化,后者体现约束条件。
6. 例:螺旋曲线Clothoids 和多项式曲线Polynomial Spirals
-
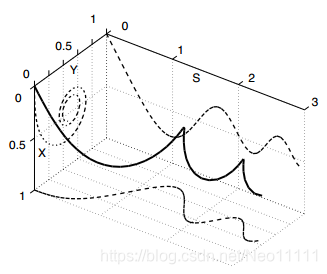
螺旋曲线
可以发现,当产生螺旋曲线式的轨迹时,有两个参数a、b,当s=0即起始点处,曲率为a,随着s的增大,曲率以b的速度增加。然而这样的曲线参数太少,当给定了起点的曲率和目标点位置时,无法保证目标点处的曲率满足要求,甚至连朝向都不一定能满足。
-
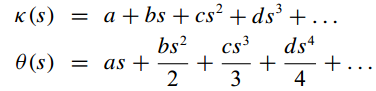
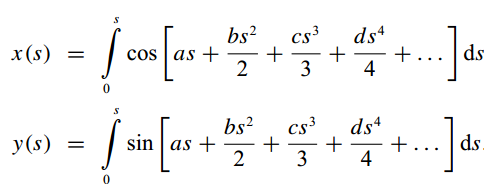
多项式曲线
多项式曲线的参数更多,可以满足更多的边界条件

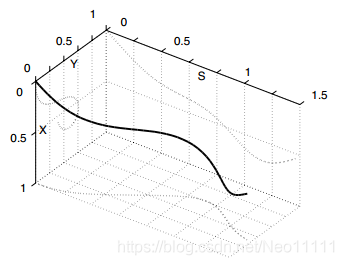
给出控制的形式后,很容易通过积分运算得到朝向、x、y随s的变化(这里默认起点位置0,0,朝向0)
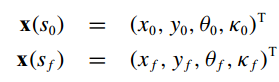
假设我们总共需要满足的边界条件有8个:
而在通过积分构造,默认
x
0
、
y
0
、
Θ
0
=
0
x_0、y_0、Θ_0=0
x0、y0、Θ0=0,故前三个约束是自然满足的,还剩五个约束需要去满足,即
k
0
、
x
f
、
y
f
、
Θ
f
、
k
f
k_0、x_f、y_f、Θ_f、k_f
k0、xf、yf、Θf、kf

而恰好有五个参数
首先考虑
k
0
k_0
k0,将s=0带入k(s),即可得到,要满足
k
0
k_0
k0的约束只需
对于剩下四个边界条件:
7. 评价函数J的设计
1) 边界条件可以不作为约束,而体现在J中
对于轨迹上某个点的要求,体现在
ϕ
\phi
ϕ函数的设计上

2) 希望轨迹更平滑
对于整条轨迹的要求,体现在L函数上

















 2941
2941











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









