









在nx结合zed相机,使用yolo进行物体识别
1.venv虚拟环境安装
由于设备自带的python为python2.7环境,所以先创建虚拟环境并激活
sudo apt-get install software-properties-common
sudo apt install python3.6(可用存储库管理)
sudo aptitude install python3.6-venv
python3 -m venv torch2
source torch2/bin/activate




2.安装torch和torchvision
2.1安装torch及其依赖
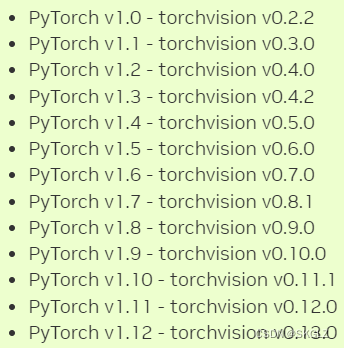
NVIDIA论坛网址:https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048,whl文件可从网站下载,torchvison从github下载对应版本即可
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev libomp-dev
pip3 install Cython
pip3 install torch-1.8.0-cp36-cp36m-linux_aarch64.whl



2.2安装对应版本torchvision
由于我安装的torch1.7,git clone对应的0.8.1torchvision,下载之后执行以下操作:
cd torchvision
export BUILD_VERSION=0.8.1
python3 setup.py install(venv虚拟环境不能添加–user)

若过程中出现 invalid command ‘bdist_wheel’,如下:

解决方法:pip3 install wheel
安装完成后可能仍然无法使用torchvision,提示future feature annotations is not defined,可能是由于pillow版本不符合(过高),我使用的版本下对应解决方法为:pip install pillow==8.1.0

安装完成:

3.安装ZED的python api
cd /usr/local/zed
python3 get_python_api.py

其他问题:报错illegal instruction(core dumped)

4.安装yolo
为了方便最开始的测试,此处安装yolov5进行简单试验
直接git要使用的yolo版本,有些yolo版本无法正常安装使用,先换其他版本,不要换环境,若要使用ZED相机官方给的示例,2022年开始的版本更改个别函数名称或参数即可
安装yolo直接pip install -r requirements.txt即可
速度下载很慢或卡在building时,解决方法:
pip install --upgrade pip


安装opengl相关
pip install PyOpenGL PyOpenGL_accelerate

5.安装完成后,用自己修改和训练的模型正常测试即可,可用torch线程运行yolo检测,ros线程控制设备和相机进行交互
小实验的代码:
#!/usr/bin/env python3
import sys
import numpy as np
import argparse
import torch
import cv2
import pyzed.sl as sl
import torch.backends.cudnn as cudnn
sys.path.insert(0, './yolov5')
###problem
from models.experimental import attempt_load#######################################################
from utils.general import check_img_size, non_max_suppression, scale_coords, xyxy2xywh
from utils.torch_utils import select_device
from utils.augmentations import letterbox
###
from threading import Lock, Thread
from time import sleep
import ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewer
###ros
from sys import maxunicode
from turtle import position
import rospy
from std_msgs.msg import String
from std_msgs.msg import Float64
from zed_interfaces.msg import Object
from zed_interfaces.msg import ObjectsStamped
from geometry_msgs.msg import Twist
import math
###
lock = Lock()
run_signal = False
run_signal2 = False
exit_signal = False
def img_preprocess(img, device, half, net_size):
net_image, ratio, pad = letterbox(img[:, :, :3], net_size, auto=False)
net_image = net_image.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
net_image = np.ascontiguousarray(net_image)
img = torch.from_numpy(net_image).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
return img, ratio, pad
def xywh2abcd(xywh, im_shape):
output = np.zeros((4, 2))
# Center / Width / Height -> BBox corners coordinates
x_min = (xywh[0] - 0.5*xywh[2]) * im_shape[1]
x_max = (xywh[0] + 0.5*xywh[2]) * im_shape[1]
y_min = (xywh[1] - 0.5*xywh[3]) * im_shape[0]
y_max = (xywh[1] + 0.5*xywh[3]) * im_shape[0]
# A ------ B
# | Object |
# D ------ C
output[0][0] = x_min
output[0][1] = y_min
output[1][0] = x_max
output[1][1] = y_min
output[2][0] = x_min
output[2][1] = y_max
output[3][0] = x_max
output[3][1] = y_max
return output
def detections_to_custom_box(detections, im, im0):
output = []
for i, det in enumerate(detections):
if len(det):
det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round()
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
for *xyxy, conf, cls in reversed(det):
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
# Creating ingestable objects for the ZED SDK
obj = sl.CustomBoxObjectData()
obj.bounding_box_2d = xywh2abcd(xywh, im0.shape)
obj.label = cls
obj.probability = conf
obj.is_grounded = False
output.append(obj)
return output
def torch_thread(weights, img_size, conf_thres=0.2, iou_thres=0.45):
global image_net, exit_signal, run_signal, detections
print("Intializing Network...")
device = select_device()
half = device.type != 'cpu' # half precision only supported on CUDA
imgsz = img_size
# Load model
model = attempt_load(weights, map_location=device) # load FP32
stride = int(model.stride.max()) # model stride
imgsz = check_img_size(imgsz, s=stride) # check img_size
if half:
model.half() # to FP16
cudnn.benchmark = True
# Run inference
if device.type != 'cpu':
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
while not exit_signal:
if run_signal:
lock.acquire()
img, ratio, pad = img_preprocess(image_net, device, half, imgsz)
pred = model(img)[0]
det = non_max_suppression(pred, conf_thres, iou_thres)
# ZED CustomBox format (with inverse letterboxing tf applied)
detections = detections_to_custom_box(det, img, image_net)
lock.release()
run_signal = False
sleep(0.01)
def distance(position):
x=-position[2]
y=-position[0]+0.06
z=position[1]
dis=math.sqrt(x*x+y*y+z*z)
return dis,x,y,z
#if people_exist==TRUE
def movecar1(dis,x,y,z):
#linear_x angular_z
if dis>=1.5:
linear_x=0.3
elif dis<=0.7:
linear_x=-0.3
else:
linear_x=0
if abs(y)<0.35:
angular_z = -0.2
linear_y=-0.1
elif abs(y)>1:
angular_z = 0.3
linear_y = 0.1
else:
angular_z=0
linear_y=0
return linear_x,linear_y,angular_z
#if people_exist==FALSE
def movecar2():
angular_z=0.5
return angular_z
def find_object(object_list):
object_tot=object_list
max_con=object_tot[0]
for obj_tmp in object_tot:
if obj_tmp.confidence>max_con.confidence:
max_con=obj_tmp
return max_con
def ros_thread():
#global image_net, exit_signal, run_signal, detections
global objects_total, run_signal2###
print("rostopic publish!!!!!!!!!!!!!!!!!!!!!!")
try:
#rospy.init_node('pylistener',anonymous=True)
while (not rospy.is_shutdown()) and (not exit_signal):
if run_signal2:
lock.acquire()
obj=objects_total
rospy.loginfo("Listener:")
rospy.loginfo("people num: %d",len(obj.object_list))
pub_vel_cmd = rospy.Publisher('/tianbot_01/cmd_vel', Twist, queue_size=10)
pub_info = rospy.Publisher('detect_position_info', Float64, queue_size=10)###trans info
if len(obj.object_list)>0:
object_max=find_object(obj.object_list)
if object_max.confidence>90:
#the colsest people position:x,y,z
###num=closest_people(obj)
#position=obj.object_list[0].position###先考虑0
position=object_max.position
rospy.loginfo("the closest car position(x,y,z): %f %f %f",-position[2],-position[0]+0.06,position[1])
dis,x,y,z=distance(position)
linear_x,linear_y,angular_z=movecar1(dis,x,y,z)
#move
vel_cmd = Twist()
vel_cmd.linear.x = linear_x
vel_cmd.linear.y = linear_y
vel_cmd.angular.z = angular_z
pub_vel_cmd.publish(vel_cmd)
pub_info.publish(dis)###trans info
else:
angular_z=movecar2()
#move
vel_cmd = Twist()
vel_cmd.linear.x = 0.2
vel_cmd.angular.z = 0.5
pub_vel_cmd.publish(vel_cmd)
lock.release()
run_signal2 = False
sleep(0.01)
except rospy.ROSInterruptException:
pass
def main():
global image_net, exit_signal, run_signal, detections, objects_total, run_signal2
capture_thread = Thread(target=torch_thread,
kwargs={'weights': opt.weights, 'img_size': opt.img_size, "conf_thres": opt.conf_thres})
capture_thread.start()
capture_thread2 = Thread(target=ros_thread)
capture_thread2.start()
print("Initializing Camera...")
zed = sl.Camera()
input_type = sl.InputType()
if opt.svo is not None:
input_type.set_from_svo_file(opt.svo)
# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=True)
init_params.camera_resolution = sl.RESOLUTION.HD720
init_params.coordinate_units = sl.UNIT.METER
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_maximum_distance = 50
runtime_params = sl.RuntimeParameters()
status = zed.open(init_params)
if status != sl.ERROR_CODE.SUCCESS:
print(repr(status))
exit()
image_left_tmp = sl.Mat() ###self
print("Initialized Camera")
positional_tracking_parameters = sl.PositionalTrackingParameters()
# If the camera is static, uncomment the following line to have better performances and boxes sticked to the ground.
# positional_tracking_parameters.set_as_static = True
zed.enable_positional_tracking(positional_tracking_parameters)
obj_param = sl.ObjectDetectionParameters()
obj_param.detection_model = sl.DETECTION_MODEL.CUSTOM_BOX_OBJECTS
obj_param.enable_tracking = True
zed.enable_object_detection(obj_param)
objects = sl.Objects()
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()
# Display
camera_infos = zed.get_camera_information()
# Create OpenGL viewer
viewer = gl.GLViewer()
point_cloud_res = sl.Resolution(min(camera_infos.camera_resolution.width, 720),
min(camera_infos.camera_resolution.height, 404))
point_cloud_render = sl.Mat()
viewer.init(camera_infos.camera_model, point_cloud_res, obj_param.enable_tracking)
point_cloud = sl.Mat(point_cloud_res.width, point_cloud_res.height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)
image_left = sl.Mat()
# Utilities for 2D display
display_resolution = sl.Resolution(min(camera_infos.camera_resolution.width, 1280),
min(camera_infos.camera_resolution.height, 720))
image_scale = [display_resolution.width / camera_infos.camera_resolution.width, display_resolution.height / camera_infos.camera_resolution.height]
image_left_ocv = np.full((display_resolution.height, display_resolution.width, 4), [245, 239, 239, 255], np.uint8)
# Utilities for tracks view
camera_config = zed.get_camera_information().camera_configuration
tracks_resolution = sl.Resolution(400, display_resolution.height)
track_view_generator = cv_viewer.TrackingViewer(tracks_resolution, camera_config.camera_fps,
init_params.depth_maximum_distance)
track_view_generator.set_camera_calibration(camera_config.calibration_parameters)
image_track_ocv = np.zeros((tracks_resolution.height, tracks_resolution.width, 4), np.uint8)
# Camera pose
cam_w_pose = sl.Pose()
while viewer.is_available() and not exit_signal:
if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:
# -- Get the image
lock.acquire()
zed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)
image_net = image_left_tmp.get_data()
lock.release()
run_signal = True
# -- Detection running on the other thread
while run_signal:
sleep(0.001)
# Wait for detections
lock.acquire()
# -- Ingest detections
zed.ingest_custom_box_objects(detections)
lock.release()
lock.acquire()
zed.retrieve_objects(objects, obj_runtime_param)
###print(len(objects.object_list))
objects_total=objects###
lock.release()
###move car
run_signal2=True
while run_signal2:
sleep(0.001)
# -- Display
# Retrieve display data
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA, sl.MEM.CPU, point_cloud_res)
point_cloud.copy_to(point_cloud_render)
zed.retrieve_image(image_left, sl.VIEW.LEFT, sl.MEM.CPU, display_resolution)
zed.get_position(cam_w_pose, sl.REFERENCE_FRAME.WORLD)
# 3D rendering
viewer.updateData(point_cloud_render, objects)
# 2D rendering
np.copyto(image_left_ocv, image_left.get_data())
cv_viewer.render_2D(image_left_ocv, image_scale, objects, obj_param.enable_tracking)
global_image = cv2.hconcat([image_left_ocv, image_track_ocv])
# Tracking view
track_view_generator.generate_view(objects, cam_w_pose, image_track_ocv, objects.is_tracked)
cv2.imshow("ZED | 2D View and Birds View", global_image)
key = cv2.waitKey(10)
if key == 27:
exit_signal = True
else:
exit_signal = True
viewer.exit()
exit_signal = True
zed.close()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='./test4.pt', help='model.pt path(s)')
parser.add_argument('--svo', type=str, default=None, help='optional svo file')
parser.add_argument('--img_size', type=int, default=416, help='inference size (pixels)')
parser.add_argument('--conf_thres', type=float, default=0.4, help='object confidence threshold')
opt = parser.parse_args()
rospy.init_node('pylistener',anonymous=True)
with torch.no_grad():
main()















 414
414











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









