









1. 前言
最近比赛中进展到需要使用mid360建图,为小车的导航提供二维的地图,本文章主要分享mid360的使用教程,以及ros2中将3维图转化为二维图,并且分享在使用过程中遇到的相关问题,希望对大家有所帮助!
2.mid360的使用教程
2.1 系统环境配置
首先把你的mid360按照说明书要求,连接好网络端口和电源,随后连接上以太网。

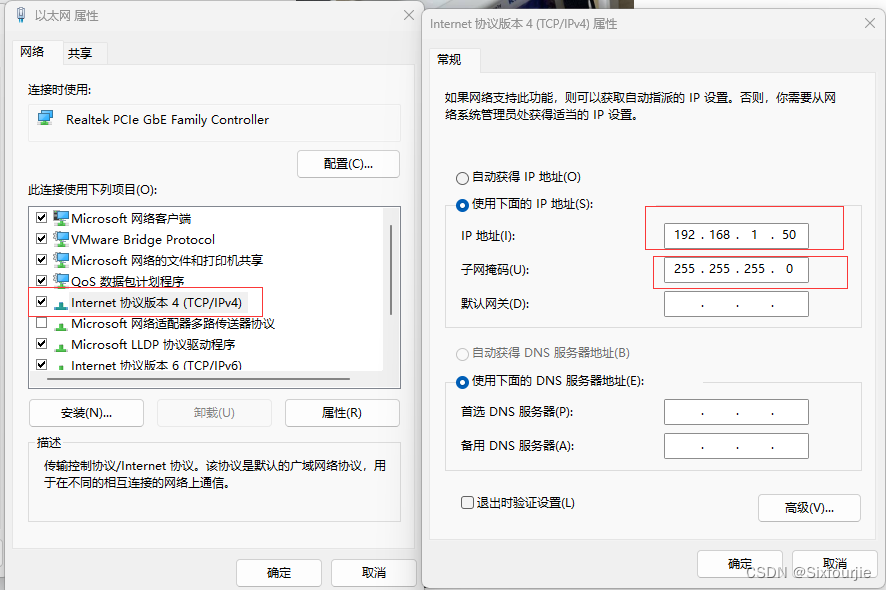
第一步进入Windows的控制面板——网络和共享中心——以太网,按照以下步骤进行配置,将你的电脑ip地址更改为192.168.1.50,保存退出。

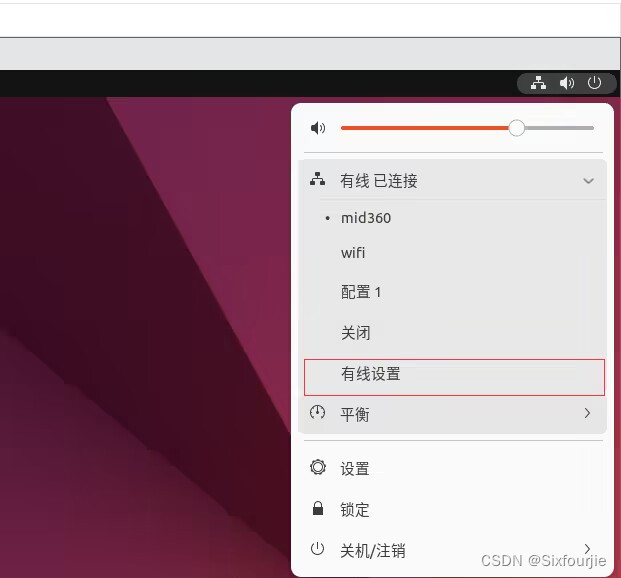
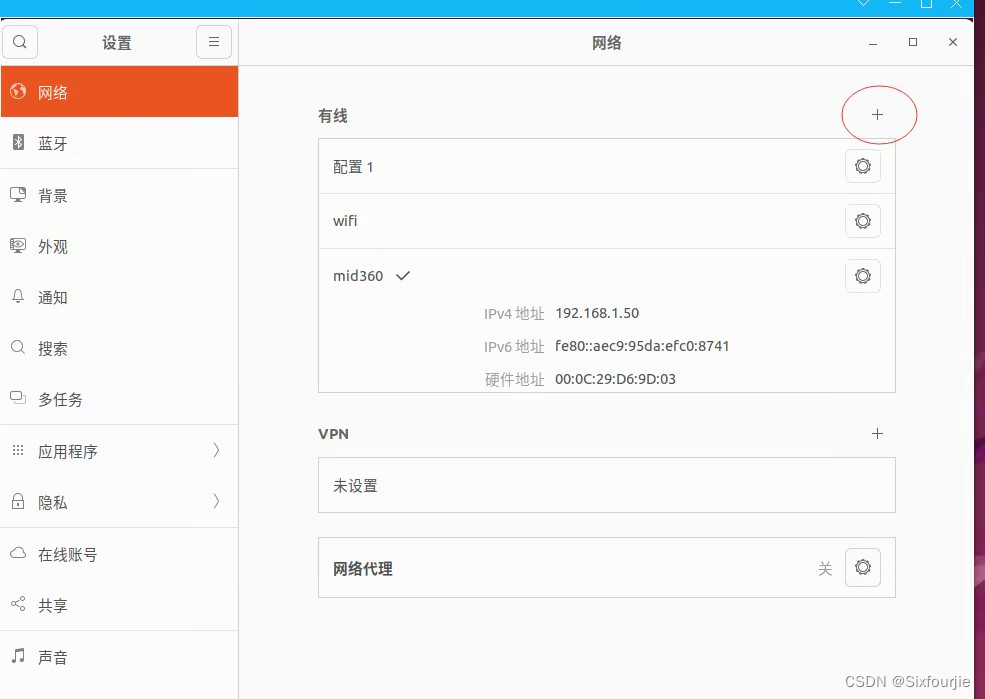
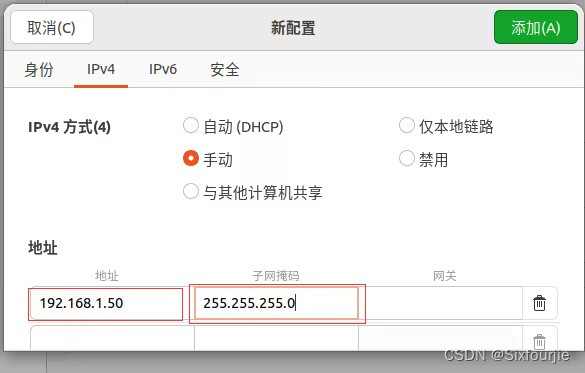
第二步进入ubuntu系统中,完成以下步骤:
(网络配置名称作者这里是mid360,可以随意填写用于区分作用(如图2))
注意!!!!!,在你使用mid360雷达的时候,建议关闭你的电脑wifi,(主要是不能连上任何的wifi,作者经常自动连接到校园网,因此浪费过很多时间),并且你的Ubuntu系统要更改成桥接模式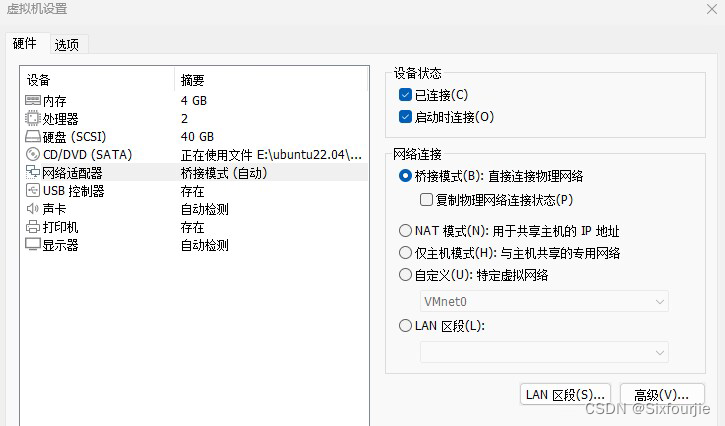
2.2驱动准备
- 首先需要在你的系统中安装Livox-SDK2
官方地址:https://github.com/Livox-SDK/Livox-SDK2
随后执行相关命令:
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make
sudo make install- 其次编译livox_ros_driver2
官方地址:https://github.com/Livox-SDK/livox_ros_driver2
相关的详细教程可参考【此博客】。
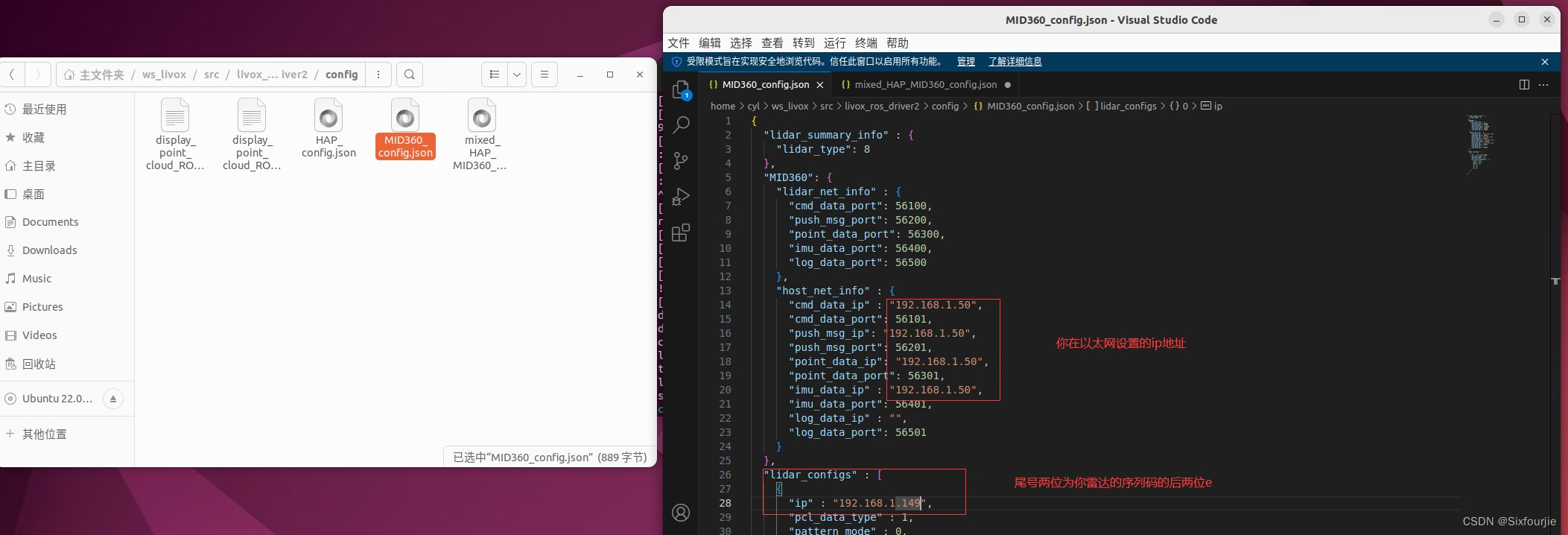
2.3修改config文件
3.运行指令
终端进入到/src/livox_ros_driver2目录下,执行如下命令:
source /opt/ros/humble/setup.sh
./build.sh humble运行launch文件
ros2 launch livox_ros_driver2 rviz_MID360_launch.py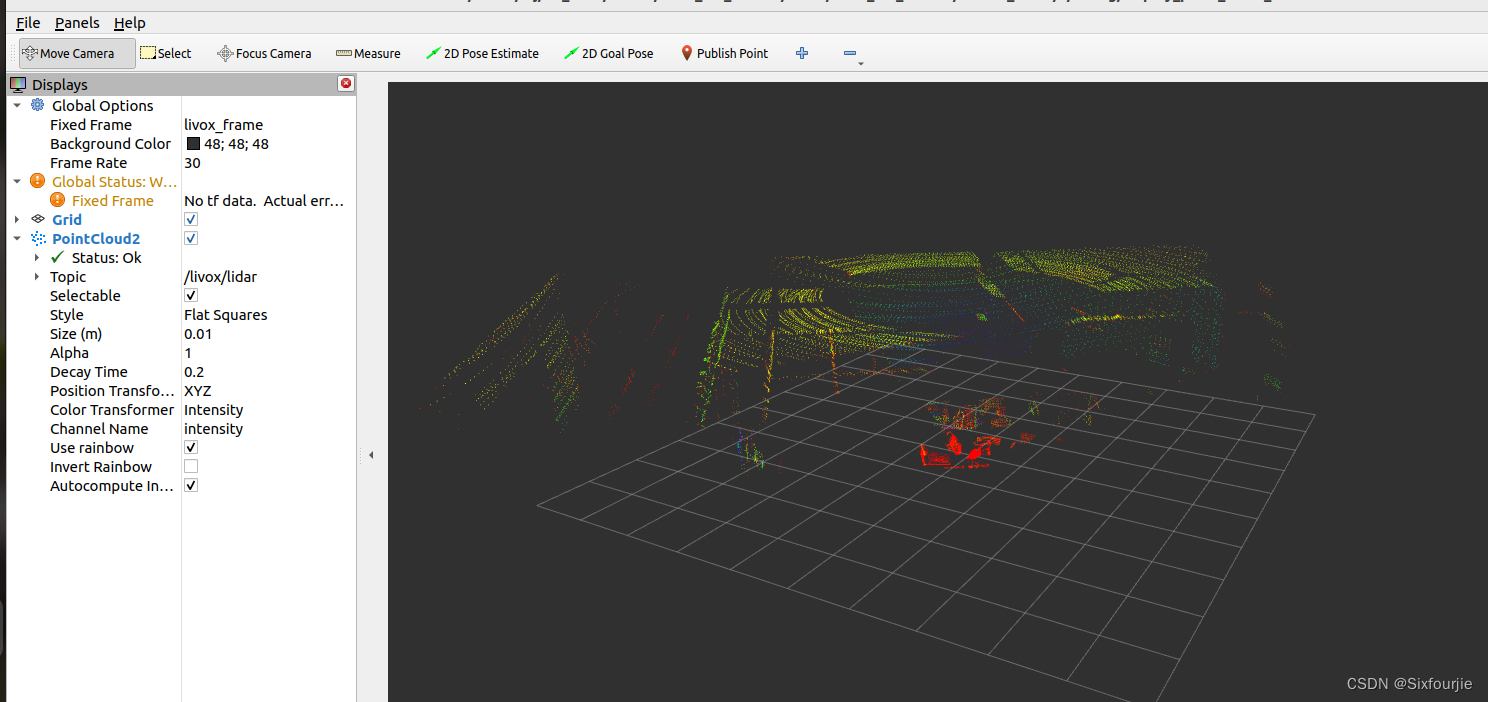
这样就完成了使用mid360建图的第一步!















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









