







示例代码:
pcl::PointCloud<PointT>::Ptr cloud_filtered_sor(new pcl::PointCloud<PointT>);
pcl::io::loadPCDFile<pcl::PointXYZ>("..\\testdata\\result\\data\\statistical.pcd", *cloud_filtered_sor)
pcl::PointXYZ min_pt, max_pt;
pcl::getMinMax3D(*cloud_filtered_sor, min_pt, max_pt);问题解决:
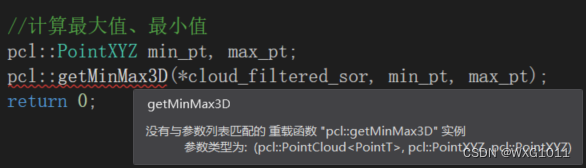
解决方法
#include <pcl/common/common.h>














 165
165











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









