







1,ROS的结点和结点管理器
视频的链接:【古月居】古月·ROS入门21讲 | 一学就会的ROS机器人入门教程_哔哩哔哩_bilibili

2,ROS的通信机制
ros通信机制包含两种模式,话题和服务两种方式
RPC是指远程过程调用,也就是说两台服务器A,B,一个应用部署在A服务器上,想要调用B服务器上应用提供的函数/方法,由于不在一个内存空间,不能直接调用,需要通过网络来表达调用的语义和传达调用的数据。
2.1 话题通信
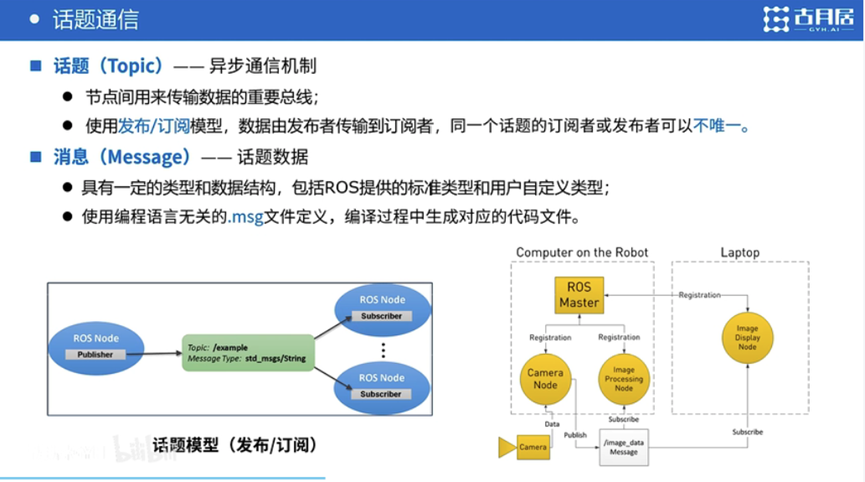
可以使用下面的方式理解,两个结点间传输数据的管道叫做话题,传输的数据类型是消息。话题是两个结点之间的一种通信方式,是异步且单向的。一端到另一端称为从发布者到订阅者。消息是要说明话题发的数据类型是什么样的。
如上图黄色部分,相机结点(发布者)发布图像数据(话题),格式RGB图像(消息),订阅者是图像处理结点,就是两个结点的话题是相机发送了一个RGB格式的图像,过程是单向且异步的
话题通信的缺点:
是一种异步通信,订阅者到底有没有拿到数据也不知道,有可能阻塞了拿不到,但是发布者不知道。
2.2服务通信
话题通信可以理解为时写信,服务通信可以理解为是打电话,双向的状态全知
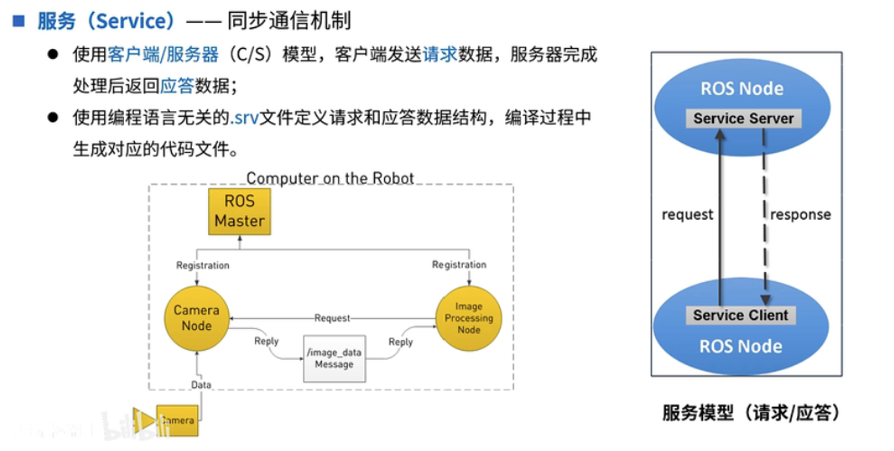
如上面的图中的黄色部分所示:相机结点和图像处理结点,使用服务通信的方式。图像处理结点发送请求,要求图像数据传入,相机收到指令,回复并将图像数据传过去;
客户端(图像处理)提需求,服务端(相机)提供客户需求对应的解决结果,服务是请求一次服务一次。
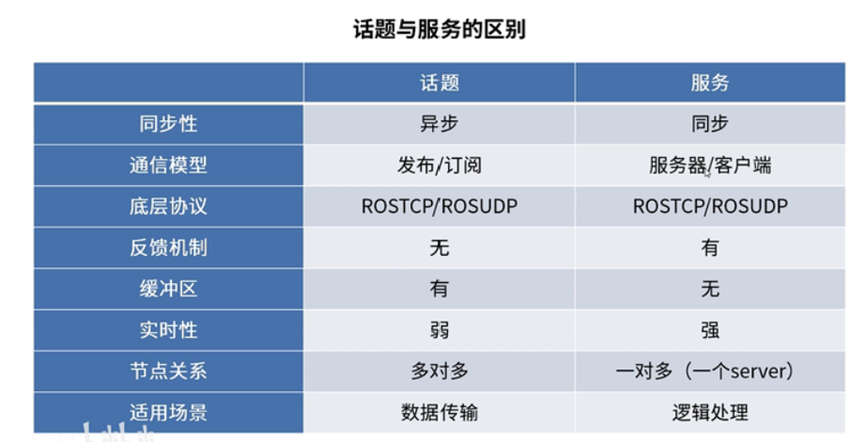
两者的区别为:
3、ROS中的参数

参数更多是设置一些不变的参数,不适合储存动态变化的参数
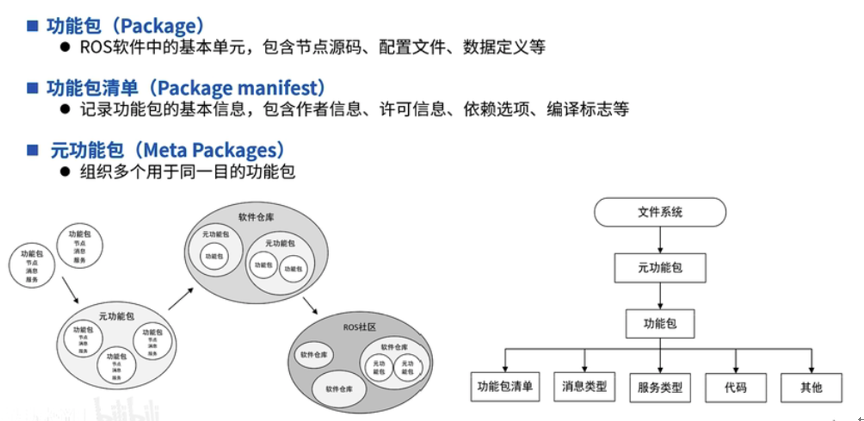
4.ROS文件系统的构成















 335
335











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









