






点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

标题:3D Lidar Mapping Relative Accuracy Automatic Evaluation Algorithm
作者:Guibin Chen, Jiong Deng, Dongze Huang, Shuo Zhang
来源:Arxiv 2020,https://arxiv.org/abs/2006.00857v1
编译:李雨昊
审核:柴毅,王靖淇

摘要

基于3D激光雷达的高精度地图HD map在无人驾驶车辆的定位,路径规划,决策,感知等方面扮演着重要作用,而在获取HDmap时大部分建图方法都依赖于SLAM技术。为了评估3D LiDAR建图的精度,最常用的方法是将估计出的位姿和位姿真值进行比较。本文提出一种相对精度评价算法,可以在没有位姿真值的条件下自动评价3D 地图的相对精度。基于激光光线在传播过程中无法穿透非透明物体的原理,通过定量检测点云地图中鬼影出现的比例来间接反映地图的精度。经过在4个数据上的实地测试,本文方法可以有效检测出如相对精度小于固定阈值0.1m的错误帧。
本文的方法的初衷是不想直接获取位姿真值,而提出的相对精度评价方法。在完成激光点的运动畸变矫正并且剔除场景中的动态物体对象之后,就可以用位姿的精度来表述点云的精度。位姿的精度可以分为绝对精度和相对精度。本文中的后者指的是位姿之间的相对位置精度。越低鬼影现象越明显,则基于匹配的在线定位方法(SLAM)效果越差。在评估HD Map的精度时,Pacc=相对位置精度大于0.1的比例,相对位置精度小于0.1会导致严重的鬼影。目前的评估方法除了带真值的绝对精度评定,相对精度评估研究的较少。人工采样检查样本太少无法反映数据的真实精度,太多又会用到大量的人力,并且效率比较低。另外一种就是检测环境中地面厚度,但是这种方法仅可检测z轴方向的误差,xy方向则靠交通信号或者路灯,但是这两种的厚度又没有严格定义,和地面厚度稍显不同。
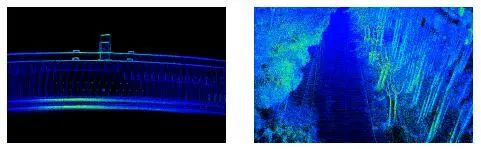
图1:在隧道或城市场景中出现的严重的鬼影现象,造成鬼影的原因主要是因为某些激光帧的位姿不准确,且匹配结果不好导致的。
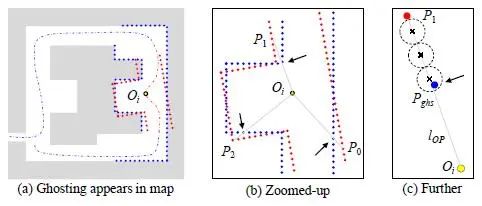
图2.方法概述。首先选定一帧激光点云,然后将其附近一定数量帧的点云依据其pose投影到该帧坐标系上得到submap,按照光线在传播时无法穿过不透明的物体的原理,判断从激光扫描仪中心O射出的光线到该时刻点云P之间不会出现其他点,如果出现则说明出现鬼影。红色和蓝色点分别对应当前帧和局部submap点,灰色实线就是激光束,箭头表明了出现的鬼影点。
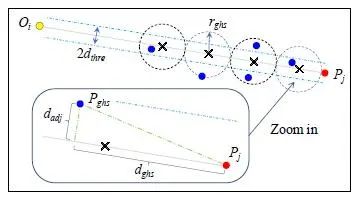
图3.考虑到测量精度,判断某一激光束上是否存在其他点需要将阈值拓宽,因此本文提出2倍的dthr作为判断是否共线的距离阈值,dghs作为判断是否是鬼影点的距离阈值。
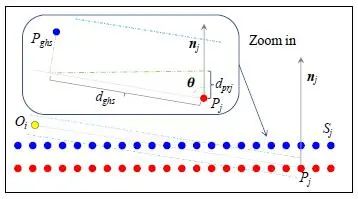
图4.由于场景中的平面可能和激光束近似平行而出现误检点,在实际计算时采用的是点到平面距离dprj进行的距离判断,如式5所示
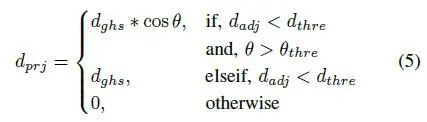
式5.鬼影点判断阈值,当dadj小于阈值dthre且激光线和该点局部法向量夹角足够大时说明是扫描线和场景中平面平行,需要额外角度约束,否则不需要。
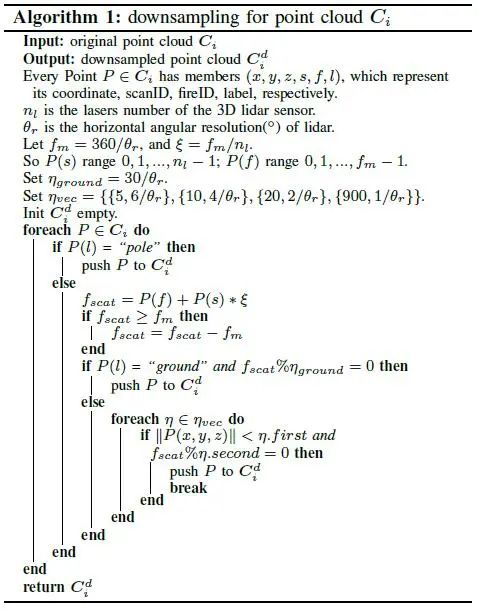
算法1.下采样方法:激光点云的某一帧和局部submap中点云数量会较大,而严重影响鬼影点的判断的计算效率,因此需要对点云进行降采样,但是又不能改变原始点云的分辨率。首先采用PointNet++提取出场景中的地面和杆状物,然后结合点在扫描时的扫描线信息对点云进行降采样,得到如下图所示的结果。
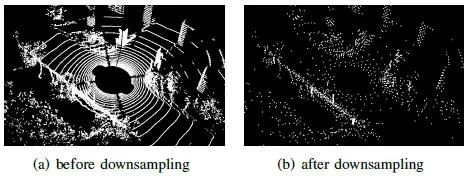
图5.下采样结果
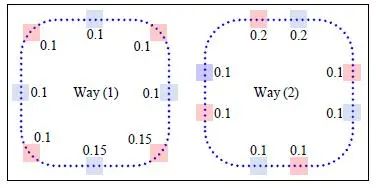
图6. 为了定量评估本文方法的精度,采用人工添加扰动的方式在如上图所示的粉色和蓝色框选的激光帧添加0.1、0.15、0.2的扰动,以评估本文方法检测鬼影的效果。
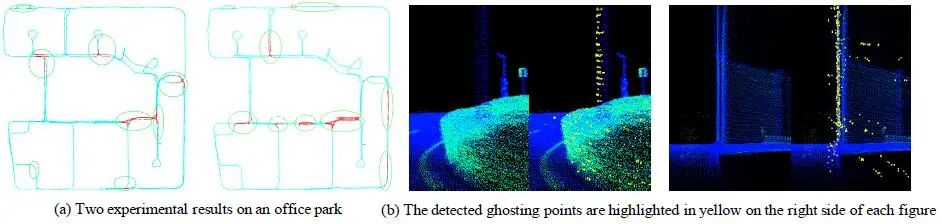
图7. 在办公室场景测试数据,b图中黄色点为检测出的鬼影点。(莫名感觉太少了。。)

Abstract
HD (High Definition) map based on 3D lidar plays a vital role in autonomous vehicle localization, planning, decision-making, perception, etc. Many 3D lidar mapping technologies related to SLAM (Simultaneous Localization and Mapping) are used in HD map construction to ensure its high accuracy. To evaluate the accuracy of 3D lidar mapping, the most common methods use ground truth of poses to calculate the error between estimated poses and ground truth, however it’s usually so difficult to get the ground truth of poses in the actual lidar mapping for autonomous vehicle. In this paper, we proposed a relative accuracy evaluation algorithm that can automatically evaluate the accuracy of HD map built by 3D lidar mapping without ground truth. A method for detecting the degree of ghosting in point cloud map quantitatively is designed to reflect the accuracy indirectly, which takes advantage of the principle of light traveling in a straight line and the fact that light can not penetrate opaque objects. Our experimental results confirm that the proposed evaluation algorithm can automatically and efficiently detect the bad poses whose accuracy are less than the set threshold such as 0.1m, then calculate the bad poses percentage Pbad in all estimated poses to obtain the final accuracy metric Pacc = 1 - Pbad.
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。
下载2
在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。
下载3
在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、orb-slam3等视频课程)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~ 

















 5810
5810

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









