






来源丨古月居
点击进入—>3D视觉工坊学习交流群
地图数据常常可以用图(Graph)这类数据结构表示,那么在图结构中常用的搜索算法也可以应用到路径规划中。
本文将从图搜索算法的基本流程入手,层层递进地介绍几种图搜索算法。首先是两种针对无权图的基本图搜索算法:深度优先搜索(Depth First Search, DFS)、广度优先搜索(Breadth First Search, BFS)。
它们的区别在于openlist(后面介绍)所选用的数据结构类型不同,前者使用栈,后者使用队列;之后引入一种启发式搜索算法:贪婪最佳优先算法(Greedy Best First Search, GBFS),用来提高搜索效率,但是不能确保找到最优路径。
最后介绍两种在路径规划中非常经典的算法:Dijkstra算法、A*算法,前者是广度优先算法(BFS)在带权图中的扩展,后者则是在前者中加入启发函数得到的算法,兼顾效率和完备性。
配置空间
在学习路径规划算法之前,首先了解一下配置空间(Configuration Space)这个概念。在实际环境,也就是机器人的工作空间(Workspace)中,机器人是有形状和大小的,这不利于进行运动规划。
要将工作空间转换到配置空间中,即将机器人转化为一个质点,同时将障碍物按照机器人的体积进行膨胀,如下图:
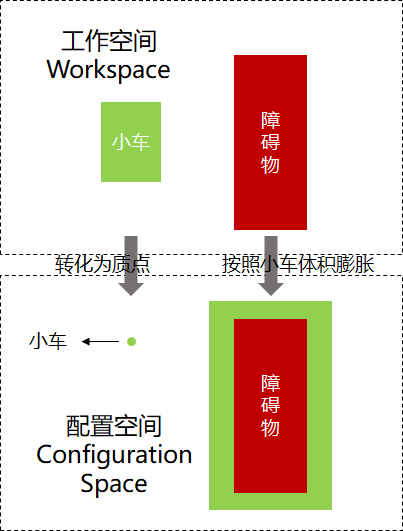
这样,在进行路径规划时,就可以将机器人当做一个点来处理了。
基本流程
下面切入正题,图搜索算法的基本流程如下:
创建一个容器,一般称为openlist,用来存储将要访问的节点,将起点加入容器,开始循环:
弹出:从容器中取出一个节点
扩展:获取该节点周围的节点,将这些节点放入容器
深度优先搜索(DFS)
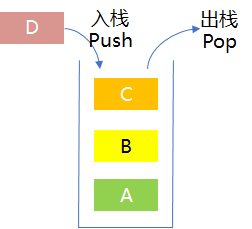
深度优先,顾名思义即深度越大的节点会被优先扩展。在DFS中,使用栈(Stack) 数据结构来实现上述特性。
栈是一种后进先出(LIFO) 的容器,如下图
以在下面的无权图中找到从节点a到节点i的路径为例,说明一下DFS算法的工作流程
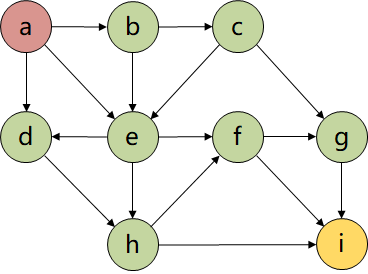
按照上节的图搜索算法的基本流程进行搜索,过程如下:

从i回溯得到路径:a->b->c->g->i,如下:
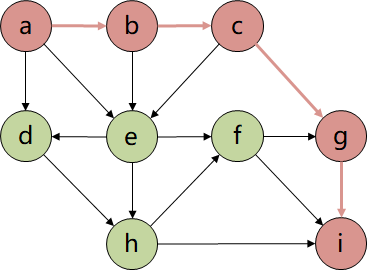
DFS能够快速地找到一条路径,是一种以时间换空间的方法。将其应用到二维地图的路径规划中,如下图,很显然找到的路径并不是移动机器人运动规划所需要的最优路径
广度优先搜索(BFS)
与DFS的“不撞南墙不回头”的个性不同,BFS在搜索时呈波状推进形式,一路稳扎稳打,它是一种以时间换空间的方法,能够保证搜索到的路径是最优的。
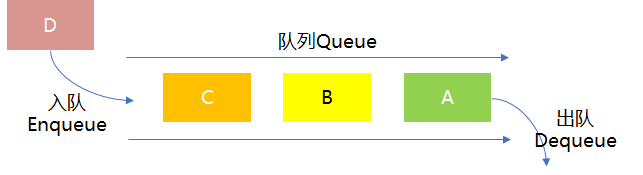
为了实现波状推进搜索特性,BFS采用队列(Queue) 作为openlist的数据结构。队列是一种先进先出(FIFO) 的容器,如下图
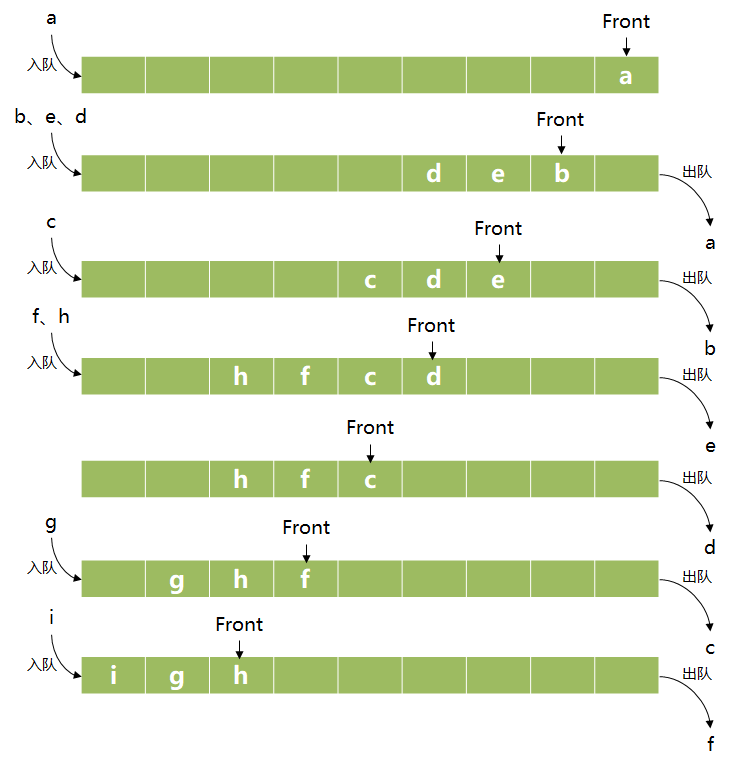
其流程与上节中DFS类似,继续以上节的图举例,过程如下,首先创建一个队列作为容器,将节点a加入队列

接着将节点a弹出队列,将节点a周围没有访问过的节点加入队列

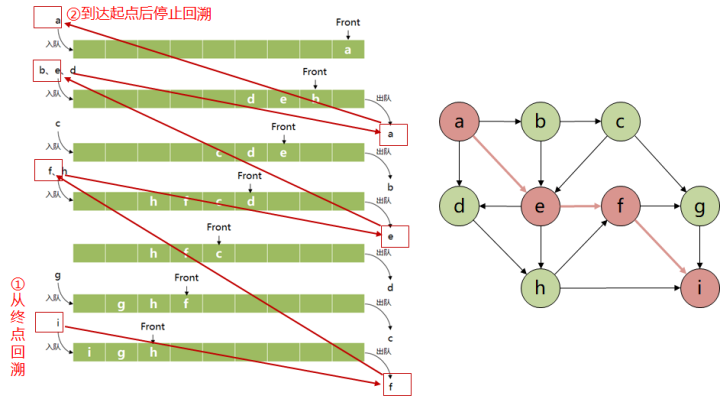
按照上面的流程不断地弹出、扩展节点,直到找到节点i为止,完整流程如下图:
从终点回溯,i的父节点为f,f的父节点为e,e的父节点为a,这样就可以得到a到i的最短路径为:a->e->f->i,如下
显而易见,相较于DFS,BFS中使用了大量的入队、出队操作,耗时增加,但是能保证找到最优路径。
启发式搜索算法
BFS和DFS的区别主要在于节点的弹出策略,根据弹出策略的区别,分别使用了队列和栈两种数据结构,而栈和队列作为两种相当基本的容器,只将节点进入容器的顺序作为弹出节点的依据,并未考虑目标位置等因素,这就使搜索过程变得漫无目的,导致效率低下。
启发式搜索算法(Heuristic Algorithm)就是用来解决搜索效率问题的,下面将以贪婪最佳优先算法(Greedy Best First Search, GBFS)为例来介绍启发式搜索算法。
GBFS也是图搜索算法的一种,它的算法流程和BFS、DFS并没有本质的不同,区别仍然在于openlist采用的数据结构,GBFS使用的是优先队列(Priority Queue),普通队列是一种先进先出的数据结构,而在优先队列中元素被赋予了优先级,最高优先级元素优先删除,也就是first in, largest out。(记住这种数据结构,后面的Dijkstra和A*算法都会用到这个结构)。
在图搜索算法中,使用代价函数f ( n )来作为优先级判断的标准,f ( n )越小,优先级越高,反之优先级越低。
GBFS作为一种启发式搜索算法,使用启发评估函数h ( n )
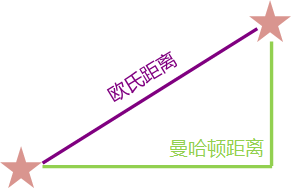
其中h ( n ) 是当前节点到终点的代价,它可以指引搜索算法往终点靠近,主要用欧氏距离(Euclidean Distance) 或者曼哈顿距离(Manhattan Distance) 来表示,它们的区别如下图:
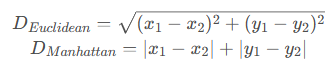
假设有两个点( x 1 , y 1 ) 和( x 2 , y 2 )则它们的欧氏距离和曼哈顿距离分别为:
将GBFS应用在二维地图路径规划中,如下图,可以看到它的指向性或者说目的非常明显,从起点直扑终点。
但是在实际的地图中,常常会有很多障碍物,它就很容易陷入局部最优的陷阱。
下图的地图中有一个专门设置的局部最优陷阱,很显然GBFS虽然搜索速度够快,但是找不到最优路径。
将其应用到复杂二维地图路径规划中,效果如下:
Dijkstra算法
上面的算法中,只有广度优先搜索(BFS)具有完备性,能够保证搜索到最优路径。
但是可以看到BFS算法搜索到的路径只有向上/下/左/右移动这四个动作,它们是没有权值或者说权值都相同的,只能用于无权图的路径规划,无法实现能够对角移动的路径规划。
因此下面介绍一种能用于带权图的图搜索算法——Dijkstra算法(狄克斯特拉算法)。
Dijkstra算法是从一个顶点到其余各顶点的最短路径算法,其流程仍然与上述算法基本一致,它也是用优先队列作为openlist的数据结构,它和GBFS的区别在于代价函数f ( n )的定义,Dijkstra算的f ( n ) 定义为:
其中g ( n )表示从起点到当前点的移动代价。
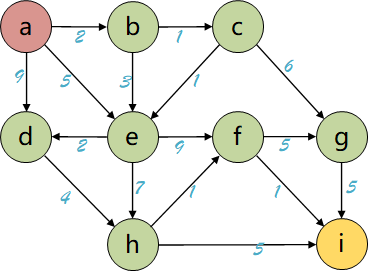
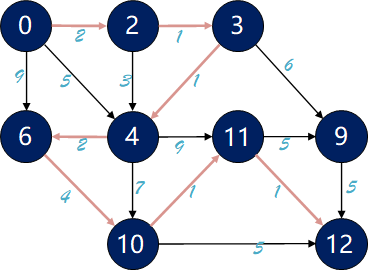
以下图为例,计算左上角起点到右下角终点的最短路径,箭头上的数值表示两个节点间的距离
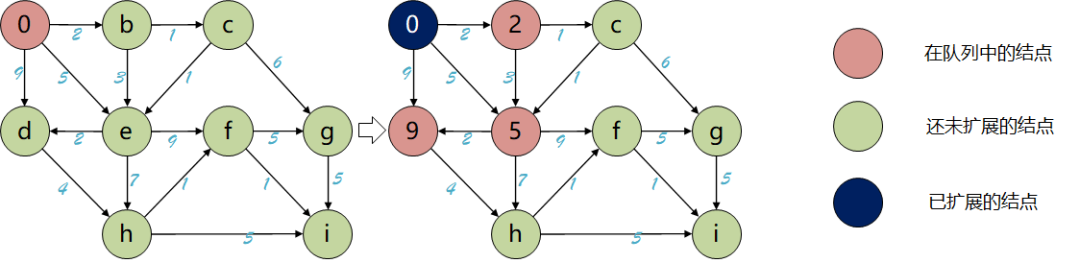
首先扩展第一个节点,计算其余节点与第一个节点的距离,用橙色标出已经扩展的节点,未扩展的节点仍用绿色标出,其中圆中的数值表示该节点的代价函数,字母则表示该节点没有直接到达此时已扩展节点的路径。
从未扩展的节点(绿色节点)中选择代价函数最小的节点进行拓展,并更新其余节点的代价函数,如下图
重复进行上面的步骤,直到所有节点都已扩展。
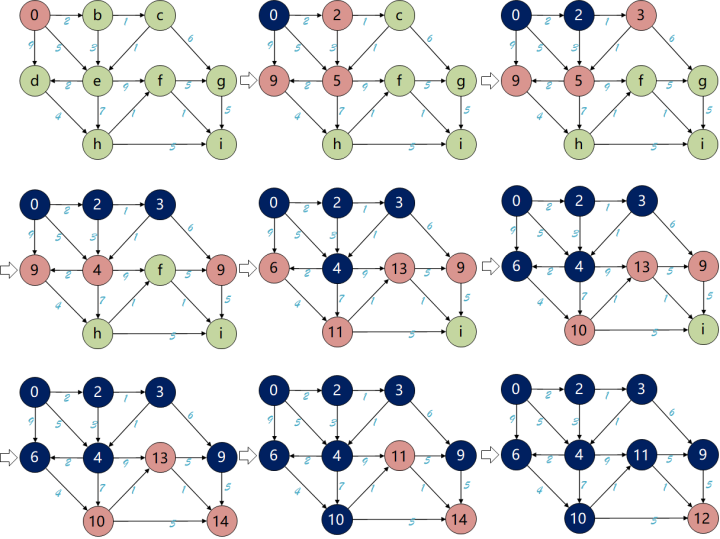
最后标出起点到终点的最短路径
将Dijkstra算法应用到二维地图路径规划中,如下图,可以看到Dijkstra算法能够得到最优路径,但是它的速度和BFS是一样的,采取的都是稳扎稳打、波状前进的方式,导致速度较慢。
A*算法
对比GBFS和Dijkstra算法,两者都采用优先队列作为openlist,而代价函数的不同导致两者具有不同的优点:GBFS用节点到目标点的距离作为代价函数,将搜索方向引向目标点,搜索效率高;而Dijkstra算法采用起点到当前扩展节点的移动代价作为代价函数,能够确保路径最优。
那么可不可以将两者的代价函数进行融合,从而在保证路径最优的同时提高搜索效率?答案是肯定的,融合后的算法就是A*算法。
A*算法也是一种启发式算法,它的代价函数表示为:
其中g ( n ) 为起点到当前扩展节点的移动代价函数,h ( n ) 是启发函数,用节点到目标点的距离函数来表示。
根据这个式子,可以得到A*算法的几个特点:
如果令h ( n ) = 0 A* 算法就退化为Dijkstra算法;如果令g ( n ) = 0A* 算法就退化为GBFS算法。
能否找到最优路径的关键是启发函数h ( n ) 的选取,如果h ( n ) 在大部分情况下比从当前节点到目标点的移动代价小,则能找到最优路径。
由于A* 算法的启发函数是位置上的距离,因此在不带位置信息的图数据中不适用。
将A*算法应用到二维地图路径规划中,如下图:
参考:
图的实现(c++)
https://blog.csdn.net/y1054765649/article/details/88763699
机器人路径规划之Dijkstra算法
https://blog.csdn.net/qq_42688495/article/details/106269382
版权声明:本文为CSDN博主「白鸟无言」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:
https://blog.csdn.net/qq_42688495/article/details/113108292
本文仅做学术分享,如有侵权,请联系删文。
点击进入—>3D视觉工坊学习交流群
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿,微信号:dddvisiona
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看,3天内无条件退款
高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~

















 1549
1549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









