







2023.7.23
这里先简单写下我的操作步骤,因为网上已经有很多关于手眼标定的原理,这里我就不多赘述,后续有时间会进行详细介绍。
下面的操作步骤需要你掌握eye_to_hand手眼标定的知识,话不多说,先给出标定操作步骤,这些都是个人见解,仅供参考,不对的地方还请各位在评论区指出,我们一起进步!
(由于最近没时间,不去介绍代码如何使用了,代码有点乱对小白并不友好,不懂的可以在评论区留言,我再进行修改解释)
一、获取三维坐标
这里我使用的是深度相机D435i,具体相关代码有空再补上。标定的代码是参考B站up手眼标定视频的方法,但他所使用的是UR5机械臂,与delta差别很大,我能力有限,没法直接使用,有大佬能将其直接用在delta机械臂上还请教教我!!!
我对他的代码进行了修改
主代码
#!/usr/bin/env python
import numpy as np
import time
import cv2
from real.realsenseD415 import Camera
from real.delta_chuanKo import Moving
# delta的运动范围
# workspace_limits = np.asarray([[0, 100], [-100, 100], [-400, -300]])
workspace_limits = np.asarray([[-0.05, 0.05], [-0.05, 0.05], [-0.4, -0.3]])
calib_grid_step = 0.05
# 棋盘格中心点相对于末端执行器的距离
# checkerboard_offset_from_tool = [0,-0.13,0.02] # change me!
checkerboard_offset_from_tool = [0.13, -0.065, 0]
# Construct 3D calibration grid across workspace
# 这一部分就是生成机械臂移动的坐标
print(1 + (workspace_limits[0][1] - workspace_limits[0][0]) / calib_grid_step)
gridspace_x = np.linspace(workspace_limits[0][0], workspace_limits[0][1],
int(1 + (workspace_limits[0][1] - workspace_limits[0][0]) / calib_grid_step))
gridspace_y = np.linspace(workspace_limits[1][0], workspace_limits[1][1],
int(1 + (workspace_limits[1][1] - workspace_limits[1][0]) / calib_grid_step))
gridspace_z = np.linspace(workspace_limits[2][0], workspace_limits[2][1],
int(1 + (workspace_limits[2][1] - workspace_limits[2][0]) / calib_grid_step))
calib_grid_x, calib_grid_y, calib_grid_z = np.meshgrid(gridspace_x, gridspace_y, gridspace_z)
num_calib_grid_pts = calib_grid_x.shape[0] * calib_grid_x.shape[1] * calib_grid_x.shape[2] # 得到的是有多少组坐标
calib_grid_x.shape = (num_calib_grid_pts, 1)
calib_grid_y.shape = (num_calib_grid_pts, 1)
calib_grid_z.shape = (num_calib_grid_pts, 1)
calib_grid_pts = np.concatenate((calib_grid_x, calib_grid_y, calib_grid_z), axis=1)
measured_pts = []
observed_pts = []
observed_pix = []
# d435i RGB相机的内参
cam_intrinsics = np.array([605.839, 0, 316.720, 0, 605.772, 254.539, 0, 0, 1]).reshape(3, 3)
# Move robot to each calibration point in workspace
# 将机械臂移动到工作空间中的
print('Collecting data...')
for calib_pt_idx in range(num_calib_grid_pts):
tool_position = calib_grid_pts[calib_pt_idx, :]
tool_config = [tool_position[0], tool_position[1], tool_position[2]]
tool_config1 = [tool_position[0], tool_position[1], tool_position[2]]
print(f"tool position and orientation:{tool_config1}")
# 传给delta机械臂坐标
Moving(tool_config[0] * 1000, tool_position[1] * 1000, tool_position[2] * 1000)
time.sleep(5) # k
# Find checkerboard center
# 查找棋盘格中心点
checkerboard_size = (5, 5)
refine_criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 获取机器人的相机数据,将颜色图像和深度图像分别赋值给 camera_color_img 和 camera_depth_img
# 这里其实就是获取d435i的相机的颜色图和深度图像,只不过这里进行了集成
camera_color_img, camera_depth_img, aligned_depth_frame,depth_intrin= Camera().get_data()
bgr_color_data = cv2.cvtColor(camera_color_img, cv2.COLOR_RGB2BGR) # 将相机颜色图像从 RGB 格式转换为 BGR 格式
gray_data = cv2.cvtColor(bgr_color_data, cv2.COLOR_RGB2GRAY) # BGR 格式转换为灰度图像
# 寻找角点,找到角点,返回 checkerboard_found 为 true; corners为像素空间的角点
# 第一个参数Image,传入拍摄的棋盘图Mat图像,必须是8位的灰度或者彩色图像;
# 第二个参数patternSize,每个棋盘图上内角点的行列数,一般情况下,行列数不要相同,便于后续标定程序识别标定板的方向;
# 第三个参数corners,用于存储检测到的内角点图像坐标位置,一般是数组形式;
# 第四个参数flage:用于定义棋盘图上内角点查找的不同处理方式,有默认值。
checkerboard_found, corners = cv2.findChessboardCorners(gray_data, checkerboard_size, None,
cv2.CALIB_CB_ADAPTIVE_THRESH)
print(checkerboard_found)
if checkerboard_found:
# 角点进行亚像素级别的精确化优化,以提高角点的准确性
corners_refined = cv2.cornerSubPix(gray_data, corners, (5, 5), (-1, -1), refine_criteria)
# Get observed checkerboard center 3D point in camera space
# 因为棋盘格是5*5,所以中间的格子是第12个索引,说白了就是为了获得棋盘格的中心点像素坐标
checkerboard_pix = np.round(corners_refined[12, 0, :]).astype(int)
checkerboard_z = camera_depth_img[checkerboard_pix[1]][checkerboard_pix[0]]
# 下面就是用的像素坐标转换为相机坐标公式求出的XY,robot.cam_intrinsics也就是d435i的内参
checkerboard_x = np.multiply(checkerboard_pix[0] - cam_intrinsics[0][2], checkerboard_z / cam_intrinsics[0][0])
checkerboard_y = np.multiply(checkerboard_pix[1] - cam_intrinsics[1][2], checkerboard_z / cam_intrinsics[1][1])
if checkerboard_z == 0:
continue
# Save calibration point and observed checkerboard center
# 像素中心点的三维坐标
observed_pts.append([checkerboard_x, checkerboard_y, checkerboard_z])
# tool_position[2] += checkerboard_offset_from_tool
# 得到机械臂的坐标
tool_position = tool_position + checkerboard_offset_from_tool
measured_pts.append(tool_position)
observed_pix.append(checkerboard_pix)
# Draw and display the corners
# vis = cv2.drawChessboardCorners(robot.camera.color_data, checkerboard_size, corners_refined, checkerboard_found)
# 第一个参数image,8位灰度或者彩色图像;
# 第二个参数patternSize,每张标定棋盘上内角点的行列数;
# 第三个参数corners,初始的角点坐标向量,同时作为亚像素坐标位置的输出,所以需要是浮点型数据;
# 第四个参数patternWasFound,标志位,用来指示定义的棋盘内角点是否被完整的探测到,true表示别完整的探测到,
# 函数会用直线依次连接所有的内角点,作为一个整体,false表示有未被探测到的内角点,这时候函数会以(红色)圆圈标记处检测到的内角点;
vis = cv2.drawChessboardCorners(bgr_color_data, (1, 1), corners_refined[12, :, :], checkerboard_found)
cv2.imwrite('%06d.png' % len(measured_pts), vis)
image_RGB = np.hstack((vis, camera_color_img))
# cv2.imshow('Calibration',vis)
cv2.imshow('Calibration', image_RGB)
cv2.waitKey(1000)
else:
print('------ 没找到角点 -------')
np.savetxt('measured_pts.txt', measured_pts, delimiter=' ')
np.savetxt('observed_pts.txt', observed_pts, delimiter=' ')
相机D435i代码
import time
import numpy as np
import pyrealsense2 as rs
import cv2
class Camera(object):
def __init__(self,width=640,height=480,fps=30):
self.im_height = height
self.im_width = width
self.fps = fps
self.intrinsics = None
self.scale = None
self.pipeline = None
self.connect()
# color_img, depth_img = self.get_data()
#print(color_img, depth_img)
def connect(self):
# Configure depth and color streams
self.pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, self.im_width, self.im_height, rs.format.z16, self.fps)
config.enable_stream(rs.stream.color, self.im_width, self.im_height, rs.format.bgr8, self.fps)
# config.enable_stream(rs.stream.depth, 1280, 720, rs.format.z16, 6) # 配置depth流
# config.enable_stream(rs.stream.color, 1280, 720, rs.format.bgr8, 15) # 配置color流
# Start streaming
cfg = self.pipeline.start(config)
self.align = rs.align(rs.stream.color)
# Determine intrinsics
rgb_profile = cfg.get_stream(rs.stream.color)
self.intrinsics = self.get_intrinsics(rgb_profile)
# Determine depth scale
self.scale = cfg.get_device().first_depth_sensor().get_depth_scale()
print("camera depth scale:",self.scale)
print("D415 have connected ...")
def get_data(self):
# Wait for a coherent pair of frames: depth and color
time.sleep(1)
frames = self.pipeline.wait_for_frames()
# align
# align = rs.align(align_to=rs.stream.color)
aligned_frames = self.align.process(frames)
aligned_depth_frame = aligned_frames.get_depth_frame()
color_frame = aligned_frames.get_color_frame()
# no align
# depth_frame = frames.get_depth_frame()
# color_frame = frames.get_color_frame()
# Convert images to numpy arrays
depth_image = np.asanyarray(aligned_depth_frame.get_data(),dtype=np.float32)
# depth_image = np.asanyarray(aligned_depth_frame.get_data())
# depth_image *= self.scale
# 不注释掉在标定时会报错
# depth_image = np.expand_dims(depth_image, axis=2) # 在 depth_image 数组中在第2个维度(axis=2,从0开始计数)上增加一个维度
color_image = np.asanyarray(color_frame.get_data())
depth_intrin = aligned_depth_frame.profile.as_video_stream_profile().intrinsics
# 将深度图转化为伪彩色图方便观看, alpha=0.008可进行修改
# depth_colormap = cv2.applyColorMap \
# (cv2.convertScaleAbs(depth_image, alpha=0.008)
# , cv2.COLORMAP_JET)
return color_image, depth_image, aligned_depth_frame,depth_intrin # 运行calibrate时,去掉最后两个
def plot_image(self):
color_image,depth_image = self.get_data()
# Apply colormap on depth image (image must be converted to 8-bit per pixel first)
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET)
depth_colormap_dim = depth_colormap.shape
color_colormap_dim = color_image.shape
# If depth and color resolutions are different, resize color image to match depth image for display
if depth_colormap_dim != color_colormap_dim:
resized_color_image = cv2.resize(color_image, dsize=(depth_colormap_dim[1], depth_colormap_dim[0]),
interpolation=cv2.INTER_AREA)
images = np.hstack((resized_color_image, depth_colormap))
else:
images = np.hstack((color_image, depth_colormap))
# Show images
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', images)
# cv2.imwrite('color_image.png', color_image)
cv2.waitKey(5000)
def get_intrinsics(self,rgb_profile):
''' 不同的分辨率下的内参也是不同的 '''
raw_intrinsics = rgb_profile.as_video_stream_profile().get_intrinsics()
# print("camera intrinsics:", raw_intrinsics)
# camera intrinsics form is as follows.
#[[fx,0,ppx],
# [0,fy,ppy],
# [0,0,1]]
# intrinsics = np.array([615.284,0,309.623,0,614.557,247.967,0,0,1]).reshape(3,3) #640 480
intrinsics = np.array([raw_intrinsics.fx, 0, raw_intrinsics.ppx, 0, raw_intrinsics.fy, raw_intrinsics.ppy, 0, 0, 1]).reshape(3, 3)
return intrinsics
if __name__== '__main__':
mycamera = Camera()
# mycamera.get_data()
mycamera.plot_image()
print(mycamera.intrinsics)放在同一目录两个py文件下,这个我不用多说了吧。
操作步骤
我将棋盘格的图片打印出来贴在了一个纸片上,可以看出很简陋,没关系,不影响试验使用。
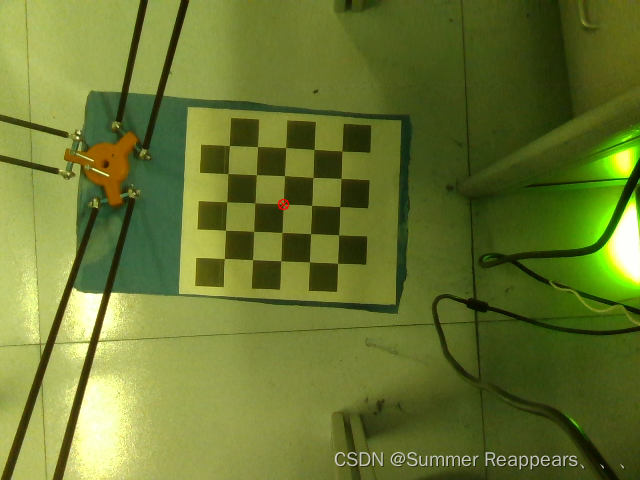
然后把制成的标定板放在delta机械臂末端,像图里那样,图里的红色原点是我在运行代码时自动生成保存的,也就是代码里的cv2.drawChessboardCorners。
二、Halcon计算旋转平移矩阵
使用B站UP的代码得出的矩阵我使用后给出的delta机械臂的XYZ坐标差的离谱,我实在不知道是啥原因,懂得大佬还请在评论区教教我啊!
所以我使用halcon中的vector_to_hom_mat3d算子来求解旋转平移矩阵,这个算子需要输入相机的xyz和机械臂的xyz,所以(一)中的代码主要就是为了获取这两个坐标xyz,坐标在下面图中的txt文件中。

然后你可以使用下边的代码输出xyz,复制到halcon中(如果不下halcon软件也是可以的,好像有python的包,可以去找一下)
import numpy as np
measured_pts = np.loadtxt(r'E:\DeltaX、GRCNN\real\measured_pts.txt', delimiter=' ')
measured_pts_x = list(measured_pts[:,0] * 1000)
print(measured_pts_x)
print(len(measured_pts_x))
measured_pts_y = list(measured_pts[:,1] * 1000)
print(measured_pts_y)
print(len(measured_pts_y))
measured_pts_z = list(measured_pts[:,2] * 1000)
print(measured_pts_z)
observed_pts = np.loadtxt(r'E:\DeltaX\GRCNN\real\observed_pts.txt', delimiter=' ')
observed_pts_x = list(observed_pts[:,0])
print(observed_pts_x)
print(len(observed_pts_x))
observed_pts_y = list(observed_pts[:,1])
print(observed_pts_y)
print(len(observed_pts_y))
observed_pts_z = list(observed_pts[:,2])
print(observed_pts_z)
print(len(observed_pts_z)) 

三、旋转矩阵使用
需要你点击图像一点,会给出机械臂的坐标,还是比较准确的
target_position
#!/usr/bin/env python
import matplotlib.pyplot as plt
import numpy as np
import time
import cv2
from realsenseD415 import Camera
import pyrealsense2 as rs
from UR_Robot import UR_Robot
# User options (change me)
# --------------- Setup options ---------------
# tcp_host_ip = '192.168.50.100' # IP and port to robot arm as TCP client (UR5)
# tcp_port = 30003
# tool_orientation = [-np.pi,0,0]
# ---------------------------------------------
# # Move robot to home pose
# robot = UR_Robot(tcp_host_ip,tcp_port)
# # robot.move_j([-np.pi, -np.pi/2, np.pi/2, 0, np.pi/2, np.pi])
# grasp_home = [0.4, 0, 0.4, -np.pi, 0, 0] # you can change me
# robot.move_j_p(grasp_home)
# robot.open_gripper()
#
# # Slow down robot
# robot.joint_acc = 1.4
# robot.joint_vel = 1.05
# Callback function for clicking on OpenCV window
click_point_pix = ()
camera_color_img, camera_depth_img,aligned_depth_frame, depth_intrin = Camera().get_data()
cam_intrinsics = np.array([605.839, 0, 316.720, 0, 605.772, 254.539, 0, 0, 1]).reshape(3, 3)
cam_depth_scale = -3.906250000008885254e-04
cam_pose = np.loadtxt(r'E:\DeltaX\GRCNN\real\camera_pose.txt', delimiter=' ')
def mouseclick_callback(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
global camera, robot, click_point_pix
click_point_pix = (x,y)
dis = aligned_depth_frame.get_distance(x,y)
print('深度距离为:',dis)
camera_xyz = rs.rs2_deproject_pixel_to_point(depth_intrin, (x,y), dis)
camera_xyz = list(camera_xyz)
print('得到的三维坐标',camera_xyz)
camera_xyz = np.array(camera_xyz) * 1000
print('第二次得到的三维坐标',camera_xyz)
camera_xyz.shape = (3,1)
# Get click point in camera coordinates
# click_z = camera_depth_img[y][x] * cam_depth_scale
# click_x = np.multiply(x-cam_intrinsics[0][2],click_z/cam_intrinsics[0][0])
# click_y = np.multiply(y-cam_intrinsics[1][2],click_z/cam_intrinsics[1][1])
# if click_z == 0:
# return
# click_point = np.asarray([click_x,click_y,click_z])
# click_point.shape = (3,1)
# Convert camera to robot coordinates
# camera2robot = np.linalg.inv(robot.cam_pose)
# camera2robot = cam_pose
camera2robot = np.array([0.965468, -0.260343, -0.00966817, 200.678, -0.260111, -0.965363, 0.0203872, -121.872, -0.014641, -0.0171684, -0.999745, 100.716, 0, 0, 0, 1]).reshape(4,4)
print(camera2robot)
target_position = np.dot(camera2robot[0:3,0:3],camera_xyz) + camera2robot[0:3,3:]
target_position = target_position[0:3,0]
print(target_position)
print(target_position.shape)
# destination=np.append(target_position,tool_orientation)
# robot.plane_grasp([target_position[0],target_position[1],target_position[2]])
# Show color and depth frames
cv2.namedWindow('color')
cv2.setMouseCallback('color', mouseclick_callback)
cv2.namedWindow('depth')
while True:
camera_color_img, camera_depth_img,aligned_depth_frame, depth_intrin = Camera().get_data()
camera_depth_img = camera_depth_img * 50
bgr_data = cv2.cvtColor(camera_color_img, cv2.COLOR_RGB2BGR)
if len(click_point_pix) != 0:
bgr_data = cv2.circle(bgr_data, click_point_pix, 7, (0,0,255), 2)
cv2.imshow('color', bgr_data)
cv2.imshow('depth', camera_depth_img)
if cv2.waitKey(1) == ord('c'):
break
cv2.destroyAllWindows()















 879
879











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









