







二郎就不设置什么VIP可见啥的了,这样大家都能看到。
如果觉得受益,可以给予一些打赏,也算对原创的一些鼓励,谢谢。
钱的用途:1)布施给他人;2)二郎会有更多空闲时间写教程
搞海洋的人和其他学科的人比起来比较少,而且技术分享不多,二郎想写一篇博文,虽然看到的人可能很少,但是看到的应该都是业内的,所以……希望这篇文章能给到你启发。
1.USBL是用来做什么的?
大家都知道,位置信息对于导航之类的应用都很重要,大家也知道,我们用GPS定位。
但是大家知道水下用什么定位么?水下电磁波和光波的衰减都很大,无法用于通信,因此陆地上的一些定位方法在水下就不太适用了。
聪明的海洋学家,知道水下声波是一种有效的通信方式,因此,很多技术都基于声波,包括本文要讲的USBL。
USBL(Ultra-Short Baseline)——超短基线
超短:阵元之间的距离很少(例如:L=0.32m);
阵元:小个头的水听器,用于发送或接收声音信号;
基线:?????类似于双目视觉的基线?二郎目前还没有找到相关文献。
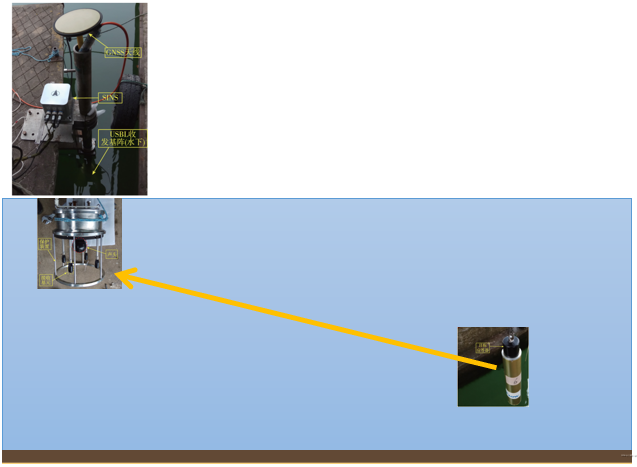
超短基线系统包括:基阵(收发基阵)和信标(应答器)。
基阵可安装在渔排,或者船的柱子上。
信标可安装在拖鱼,AUV,ROV等需要定位的水下设备上。
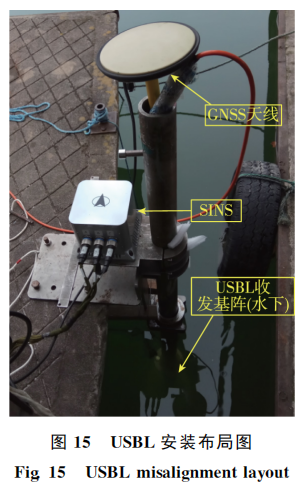
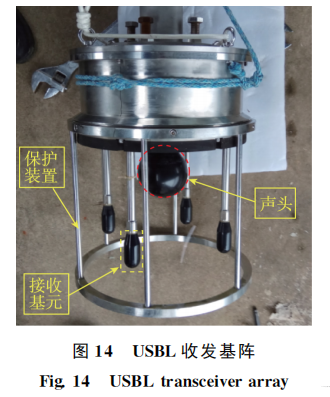

以上三张图来自论文
[1]童金武, 徐晓苏, 张涛,等. 超短基线安装误差对定位精度影响分析及其标定技术研究[J]. 导航定位与授时, 2020, v.7;No.35(02):24-33.
从上面几张图,大家就可以粗略地看到USBL的系统组成以及布放位置了。
USBL是用于水下定位的,使用时,首先需要将基阵和信标进行时间同步,同步后信标发送信息,基阵就能预测出信标发送信息的时间(因为信标和基阵之间有通信协议,例如信标只能在一分钟的第1秒、10秒、20秒发,在30秒—60秒收,基阵在1分12秒收到信息,那么这个信息就是信标在1分10秒发出的。当然很多时候是发生在一秒内的)。
2.USBL定位过程
信标发送声信号→基阵接到声信号后,计算出信标与自己的位置(距离和角度)→通过USBL与指北设备(可提供方向信息的IMU或者GNSS/INS的组合)的夹角将信标位置转换到经纬度。
1)先介绍一下北方向的确定
这里说北方其实是不准确的,它主要是用于确定我们USBL的坐标系和世界坐标系的关系。
那么这个北方怎么来呢?
带磁力计的IMU(精度不高,但是便宜)
记住,IMU是惯导,惯导是能计算出终点与起点的位置关系,但是它并不知道外界的东西南北。那为什么有人说IMU惯导可以指向北方???它内部集成了一个磁力计模块,所以可以指北,但是精度很差。
GNSS/INS的组合
这个也是可以指北的,GPS提供经纬度,INS与GPS的结合提供方向。
这里主要希望大家明确一点,惯导没法提供指北的功能,它的方向只是说与起始点的相对角度。为什么有些说可以?因为里面用了指北的模块,例如一些陀螺仪是可以指北的。
惯导不指北,指北需要加其他模块!!!!!!
2)信标发送信号
信标会按照协议,不断发送信号,然后基阵收到信号后解算。
这个过程中,需要考虑声音的声速。
由于温度、盐度和深度的影响,声速是变化的,并非1500m/s,因此需要考虑进行声速补偿。
怎么补偿?
1)使用独立的CTD设备,采集使用环境的信息,然后通过CTD数据,计算声速。(实时性不高)
2)USBL集成CTD传感器,获得CTD数据,计算声速。(实时性好,但是深度差较大时,效果不佳)
3)基阵计算角度
这个其实也比较简单,不过有很多人列公式,列得比较繁琐。
主要过程是,基阵有四个接收换能器,不同角度来的声信号在四个接收换能器接收到的时间不一样,因此可以通过正余弦定理,计算角度。
有了角度,有了飞行时间测距,之后就可以算出信标在USBL坐标系的坐标点了。
4)坐标系转换
在获得了信标坐标点后,我们可以通过矩阵旋转的方式,将USBL坐标系下的点,转换为世界坐标系的点。涉及到了旋转和平移。这里有两个角度需要计算。
1)USBL与指北设备的安装角度。theta_U
2)指北设备与北方的夹角。theta_G
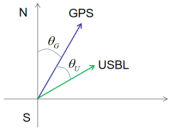
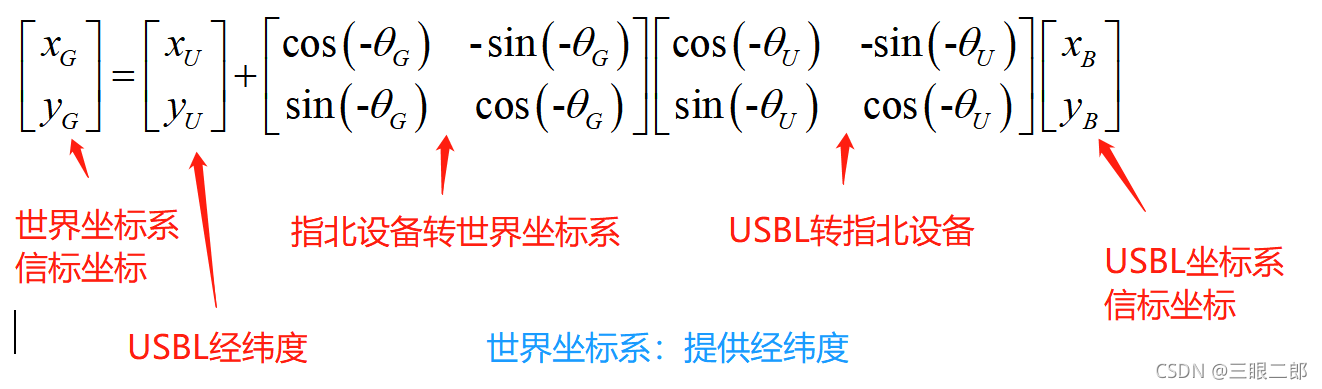
这里角度的负号:因为我们设置的正转为正,刚好和旋转时的角度定义相反,因此添加负号。
这里可能会问了,这里只有旋转没有平移么?
其实是有的,但是我们在设计时,把GPS和基阵尽量放在同一竖直方向,同时和旋转角度比起来,这一点偏移影响不大。
3.USBL标定
有两个需要标定
1)USBL的四个接收换能器可能灵敏度、处理速度不一致,或者是安装偏差等。
在测试时,会出现,信标在USBL不同方位,测出来的精度不同。
这个是一个固定的值,可以在消声水池,通过支架固定设置角度的方式,进行标定,标定后,下次使用可以直接把标定后的参数拿来用。
2)USBL与指北设备是有一定的安装角度误差的,因此,需要通过试验求得这个角度误差,然后补偿回来的。
英文对应
基阵端:
1)换能器(Transducer),包括发射单元和接收单元
2)水听器(Hydrophone),只包括接收单元,可接收应答器和声波发射器回复的信号
信标端
1)应答器(Transponder),接收询问信号,回复应答信号
2)声波发射器(Beacon/Pinger),以特定发送间隔,持续发射脉冲信号
3)响应器(Responder),包括一个发射单元(transmitter)和外接信号控制器触发
典型USBL:基阵端(水听器阵列交叉组成,安装在船上)|信标端(应答器/响应器or声波发射器,固定在海底或安装在水下航行器上)
声速值修正(Scale Factor)
如果是要购买USBL,国内可以选择
深圳市智慧海洋科技有限公司
http://www.smartoceantech.com/
他们做的USBL精度还不错,更主要是他们是完全提供技术支持的,也就是可以为客户进行定制开发。这点在其他单位是没有做的。

















 1286
1286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









