







姿态表达式的相互转换
前面介绍的四种姿态表达式在惯性导航应用中经常联合使用,需要相互转换。接下来,我们以载体系b 系和参考系R 系为例,讨论这两个坐标系的相对姿态表达式之间相互转换的计算公式。在此之前,我们再次明确强调各个符号的定义。b 系相对R 系的姿态关系描述如下:R 系按“ZYX”的转轴顺序依次转动角度ψ(航向),θ(俯仰) 和ϕ(横滚) 后与b 系对齐。
欧拉角转方向余弦矩阵
注:由于定义了角度ψ(航向),θ(俯仰) 和ϕ(横滚),因此在编写代码时要严格按照参考的b系方向来定义,比如定义北、东、地三向为b系的正方向,那么欧拉角向量中姿态角的顺序就是Att=[roll;pitch;yaw]

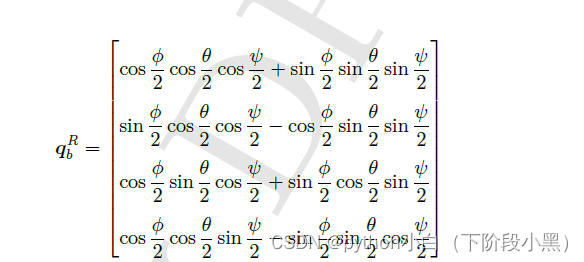
欧拉角转四元数
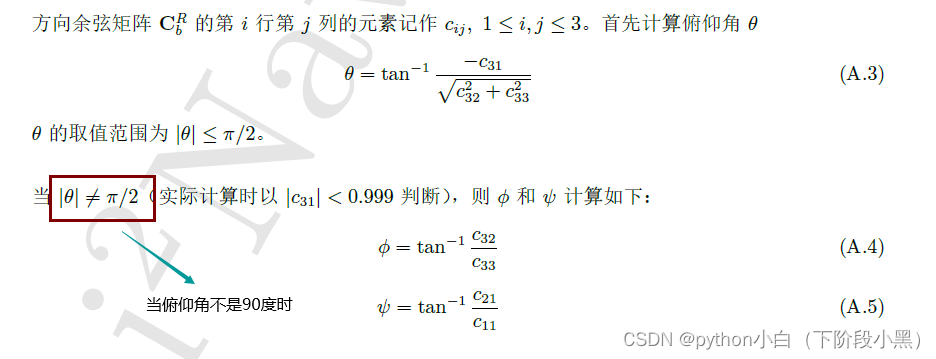
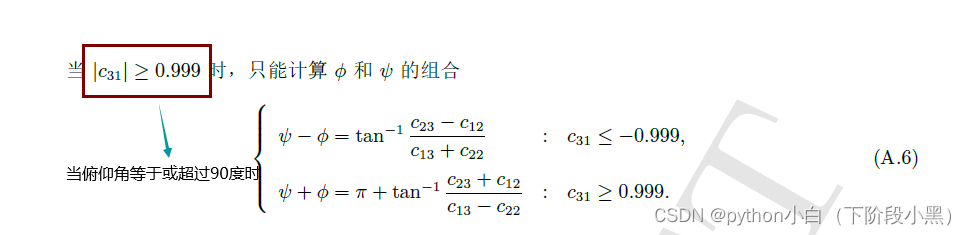
方向余弦矩阵转欧拉角
在利用方向余弦转欧拉角时,可以像下面公式一样,根据俯仰角情况选择两套计算公式:
c31指的是俯仰角的正弦值的负数
方向余弦矩阵转四元数
首先做如下计算:

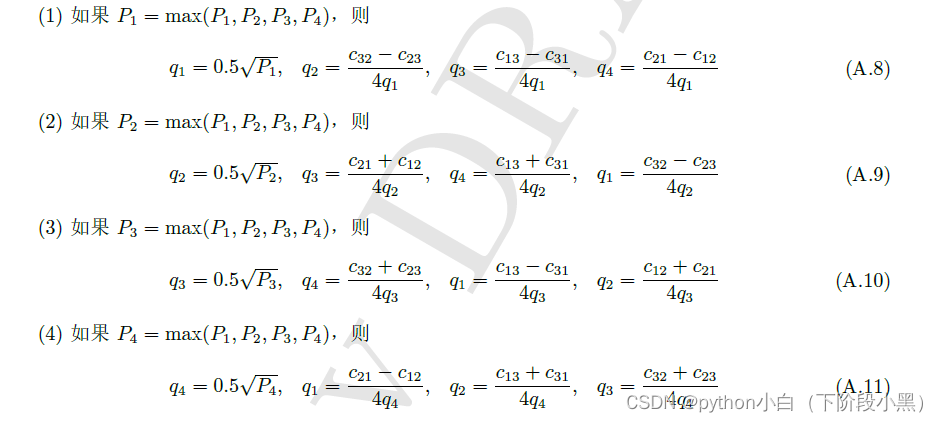
最后,如果算得的q 的实部q1 < 0,则让算得的q 取反,即q = −q。
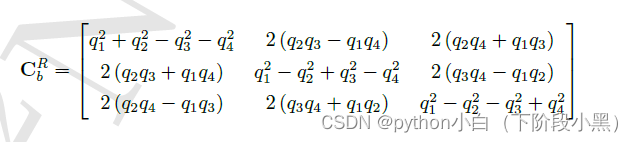
四元数转方向余弦矩阵
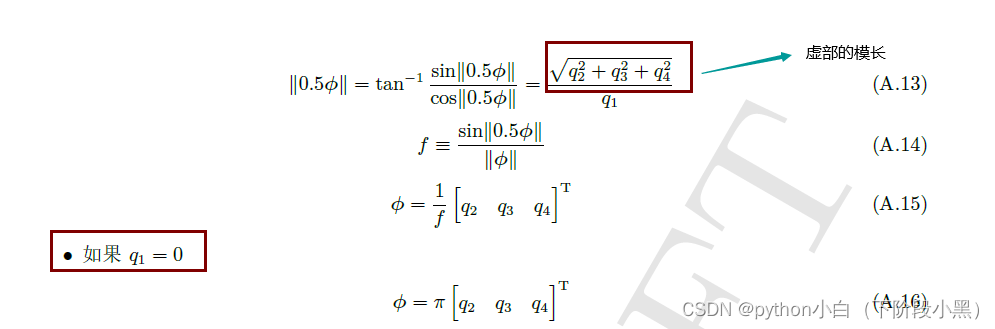
四元数转旋转矢量

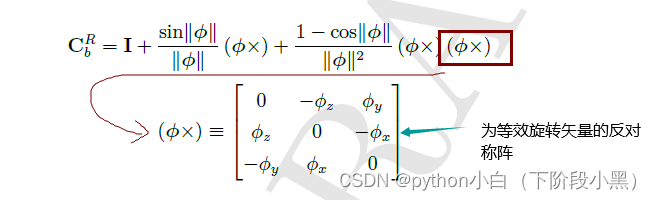
等效旋转矢量转方向余弦矩阵
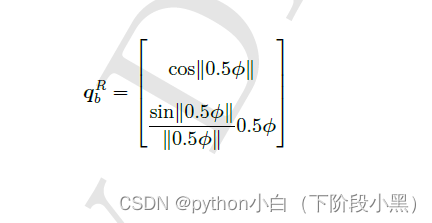
等效旋转矢量转四元数


















 6033
6033

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











