







 本文探讨了智能网联汽车(CV)和自动驾驶汽车(AV)的区别,指出CV通过V2X通信提升交通安全,而AV的技术发展历经多个阶段。文章强调了术语误用导致公众误解,并列举了AV的不同级别及其挑战。CV面临高昂成本和区域实施不一致的问题,而AV的完全自动化水平尚待实现。
本文探讨了智能网联汽车(CV)和自动驾驶汽车(AV)的区别,指出CV通过V2X通信提升交通安全,而AV的技术发展历经多个阶段。文章强调了术语误用导致公众误解,并列举了AV的不同级别及其挑战。CV面临高昂成本和区域实施不一致的问题,而AV的完全自动化水平尚待实现。
Connected and automated vehicle systems: Introduction and overview By Steven E. Shladover (2017)
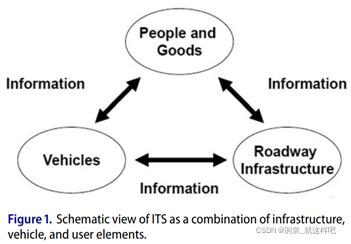
智能化和网联化系统可以提升交通系统运行水平,但是大众媒体往往混淆了CV和AV的概念,本文旨在解释二者直接区别,并指出潜在的协同作用。
CV发展已超过15年,通过DSRC的建设和应用来提升交通系统。AV发展此起披伏,目前已是第四波,由美国国防部项目推动,Google的入局引领发展。
AV话题误导的原因之一在于不准确术语的使用,在牛津英语词典中,“automation”(自动化)的定义是用电子和机械设施来代替人力,但是目前其他术语“driverless”(无人驾驶)、“self-driving”(无人驾驶)、“autonomous”(自主的)等使用不合适。
无人驾驶意味着驾驶任务完全由机器完成,目前大部分系统达不到。自主驾驶以为着独立和自给自足,车辆需要靠自身完成驾驶任务,相当于最高水平的自动驾驶。如果车辆需要与外界信息交互和协商通行,那么用“协同”也比“自主”更合适。自主驾驶的概念实际上是无意义的,因为车辆总归是要服务人的需求驾驶,那么就永远达不到自主驾驶。Autonomous和Automated要注意区分开。
美国交通部:Vehicle-Infrastructure Integration (VII)
欧洲:Cooperative ITS
PATH:人车路协同
- CV environment and options
- V2V (vehicle to vehicle); 协同碰撞预警、协同冲突消解、刹车联动、协同自适应性巡航控制、紧密队列控制、交叉口/匝道协同通行、实时公交检测,
这些技术对时效性和安全性具有高要求,需要低延迟、高可靠性系统支持 - V2I (vehicle to infrastructure);交通状态检测、车辆检测、交通信号感应、电子收费
- I2V (infrastructure to vehicle);交通信号感知、交通状态/天气感知、路线规划、封闭设施管制、行驶速度规划、队尾提醒、变道支持
- V2P (vehicle to pedestrian); 包括行人、自行车
- V2X (vehicle-to-anything). 类似于物联网概念
美国主推DSRC用于支持V2V和I2V
CV的发展具有一些限制:
- 建设预算庞大,而后期的运行和维护更是费钱
- 需要培训具有专业技能的人才来运营和使用
- CV系统建设的费用和好处难以估计,需要研究院所和高校给政府决策
- 区域建设不一致问题会导致CV车在未建设区域不能使用,影响购买者动力
自动驾驶汽车的发展历程比网联汽车更长久、也更复杂。从19世纪30年代以来,前后历经四个高潮,目前处于第四个高潮,是由Google的研究工作为标志之一,随后大量媒体的宣传,使得自动驾驶引起了全球关注。
当前自动驾驶发展挑战之一是管理公众、政府机构等对于自动驾驶不切实际的期待,在媒体的误导下,许多人以为自动驾驶将会在未来几年或几十年内就能实现。另一个挑战是对于自动驾驶术语的误用。
文中还指出,最高级别的自动驾驶可以颠覆交通系统的运营,但对于未来何时能够实现还未可知。而低级别的自动驾驶是目前迅速发展的,需要引起关注。
自动驾驶分级,但是对何时能实现需要有规划。
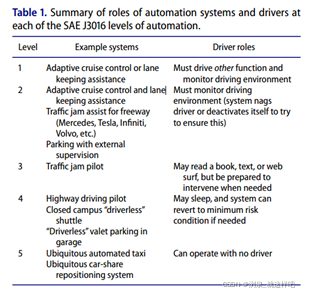
L1和L2在短期内都比较好实现,L1是驾驶辅助,一定程度上可以提高安全性,但L2系统应用,需要驾驶人时刻监督,但可能因其他活动而分心,因此安全性不太确定
L3需要接管,但是接管效率与安全性不能确定。L4可以代替驾驶人驾驶,但是需要确定确定好ODD。

















 3082
3082

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









