




 本文探讨了InceptionV2网络的设计原则和技术细节,包括避免表示瓶颈、提高局部处理能力、空间聚合的有效性等。此外,还介绍了大型卷积核的分解方法,辅助分类器的作用,以及更高效的网格尺寸缩减技巧。通过标签平滑和调整训练策略进一步提高了模型的泛化能力。
本文探讨了InceptionV2网络的设计原则和技术细节,包括避免表示瓶颈、提高局部处理能力、空间聚合的有效性等。此外,还介绍了大型卷积核的分解方法,辅助分类器的作用,以及更高效的网格尺寸缩减技巧。通过标签平滑和调整训练策略进一步提高了模型的泛化能力。
醉醉的,写完之后竟然被新的文章代替了,只能重新写一遍了~
Authors
Christian Szegedy Vincent Vanhoucke Sergey Ioffe Jonathon Shlens
Abstract
Here we are exploring ways to scale up networks in ways that aim at utilizing the added computation as efficientily as possible by suitably factorized convolutions and aggressive regularization
1 Introduction
googlenet v1 is much harder to adapt to new use-cases while maintaining its efficiency, for example, if it is deemed necessary to increase the capacity o some inception model, if just doubling the number of all filter bank sizes will lead to a 4x increase in both computational cost and number of parameters.
2 General design principles
2.1 Aviod representational bottlenecks, especially early in the network
In general the representation size should gently decrease from the inputs to the outputs before reaching the final representaion used for the task at hand.
Theoretically, information content can not be assessed merely by the dimensionality of the representation as it discards important factors like correlation structure.
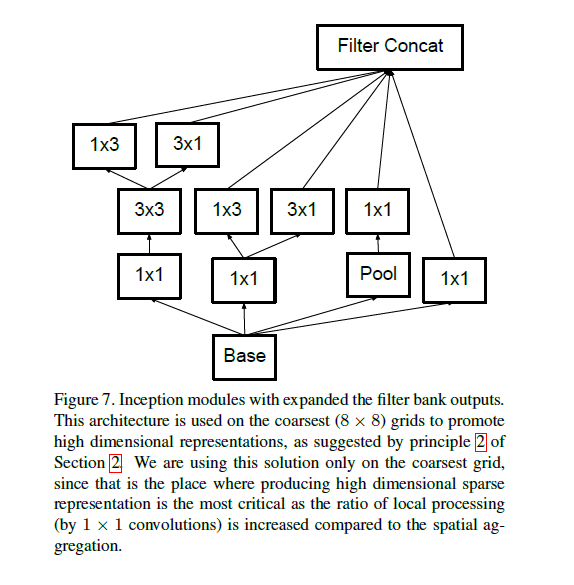
2.2 Higher dimensional representations are easier to process locally within a network.
in creasing the activations per tile in a convolutional network allows for more disentangeled features. The resulting networks will train faster.
2.3 Spatial aggregation can be done over lower dimensional embeddings wihout much or any loss in representational power
we hypothesize that the reason for that is the strong correlation between adjacent unit results in much less loss of inforamtion during dimension reduction.
The dimension reduction even promotes faster learning .
2.4 balance the width and depth of the network
width= number of filters per stage
for the reason of computational budget.
3 faxtorizing convolutions with large filter size
In a vision network, it is expected that the outputs of near-by activations are highly correlated. Therefore , we can expect that their activations can be redued before aggregation.
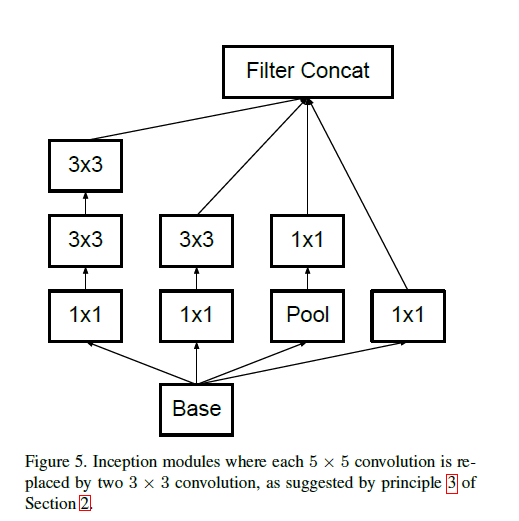
3.1 factorization into smaller convlutions
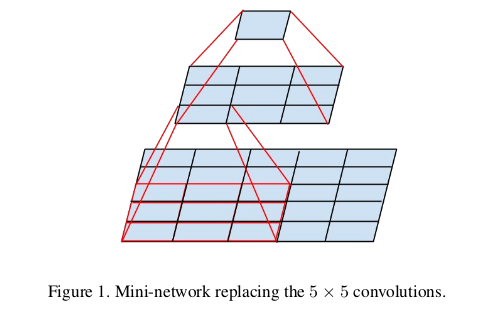
we have found that linear activation was always inferior to using rectified linear units in all stages of the factorization.
we attribute this gain to the enhanced space of variations that the network can learn expecially if we batchnormalize the output activations.
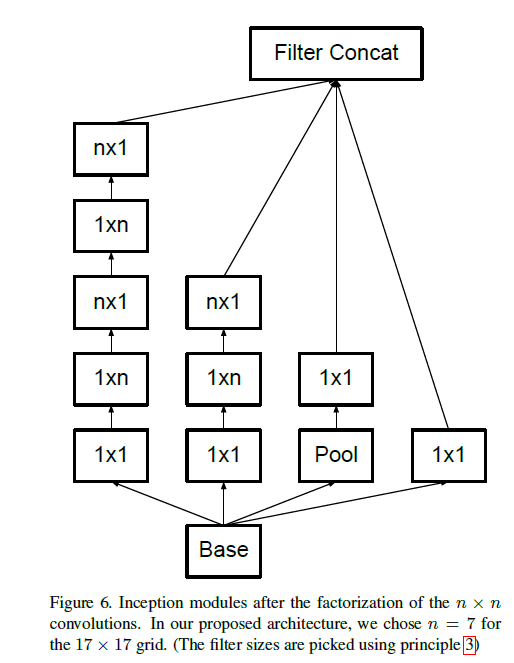
3.2 Spatial Factorization into Asymmetric convolutions
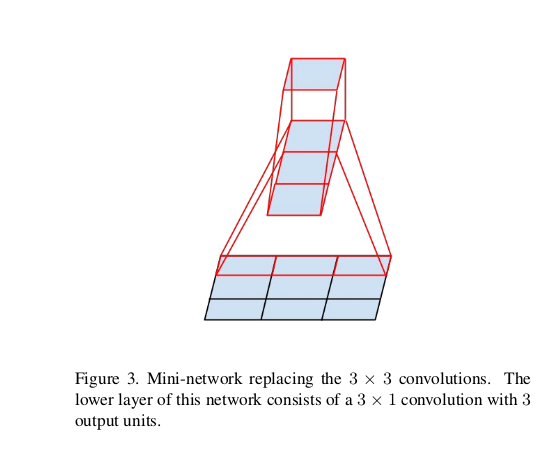
In practice, we have found that employ8ing this factorization des not work well on early layers , but it gives very good results on medium grid-sizes( on mxm feature maps, where m ranges between 12 and 20) on that level, very good results can be achieved by using 1x7 and 7x1
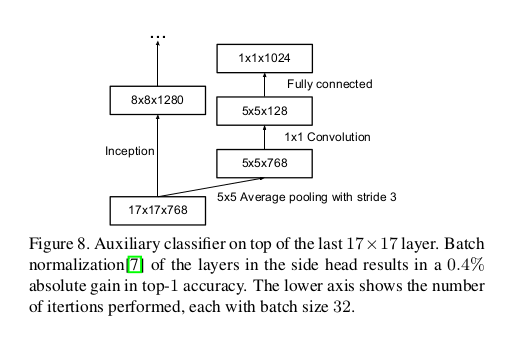
4 uility of auxiliary classifiers
We found that auiliary classifiers did not result in improved convergence early in the training.Near the end of training, the network with the auxiliary branches starts to overtake the accuracy of the network without any auxiliary branch and reaches a slightly higher plateau.
The ramoval of the lower auxiliary branch did not have any adverse effect on the final quality of the network.this means that these branches might not help low level features. but we argue that the auxiliary calssifier act as regularizer.
this is supported by the fact that the main classifier of the network performs better if the side branch is batch normalized or have a dropout layer. This also gives a weak supporting evidence for the conjecture that batch normaolization acts as a regularizer.
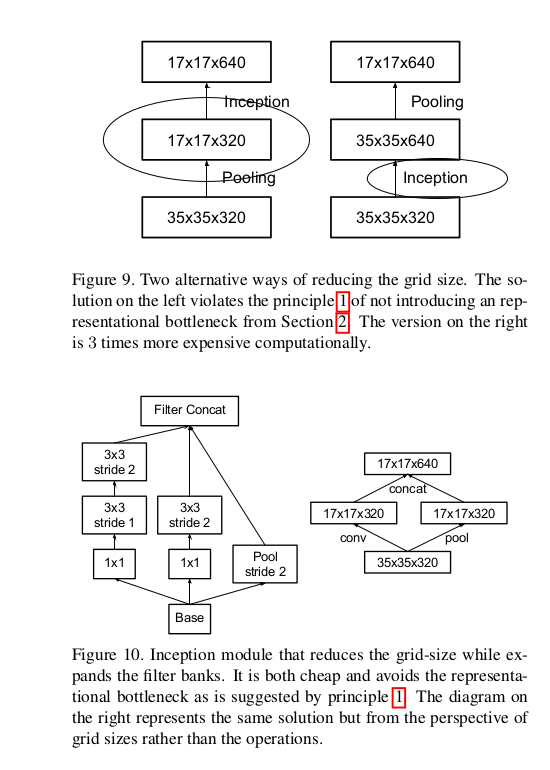
5 efficent grid size reduction
In order to avoid a representation bottleneck, before applying pooling layer the activation dimension of the network filters is expanded.
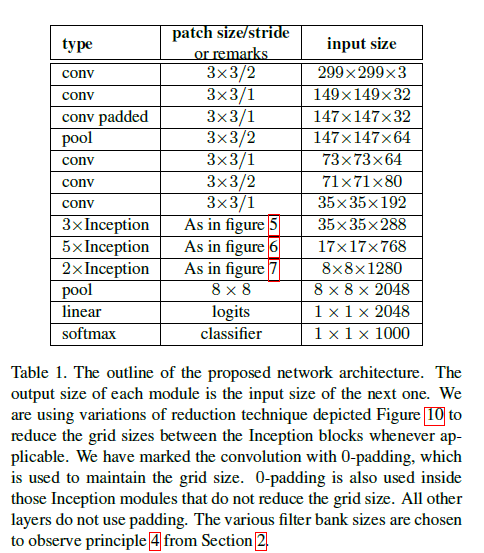
6 Inception v2
42 layer deep
7 model regularization via label smoothing
Consider a distribution over labels u(k), indepandent of training example x and a smoothing parameter
ϵ
, we replace the label distribution
q(k|x)=δk,y
:
Cross entropy:

In our imagenet experiments with k=1000 classes, u(k)=1/1000, ϵ=0.1 , 0.2% imporvement both for top-1 and top-5
8 training
batch size:32
iteration:100epochs
learning rate:0.045, decayed every two epoch exponential rate of 0.94
momentum 0.9
best models: RMSProp decay of 0.9
ϵ=1.0
gradient clipping
R. Pascanu, T. Mikolov, and Y. Bengio. On the difficulty
of training recurrent neural networks. arXiv preprint
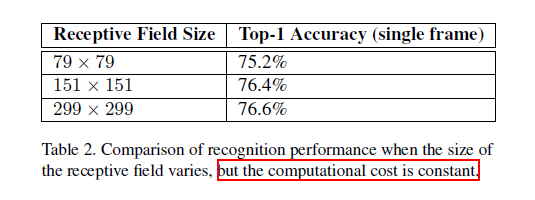
arXiv:1211.5063, 2012.9 lower resolution input
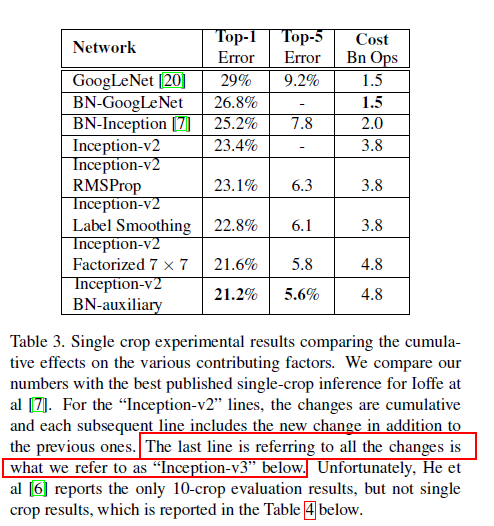
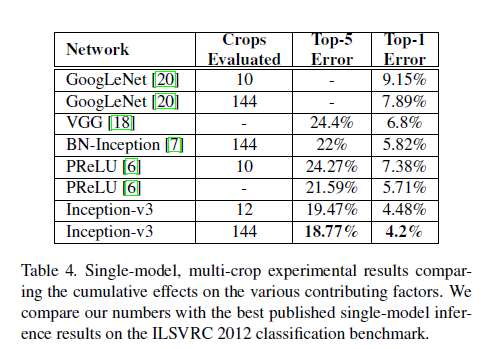
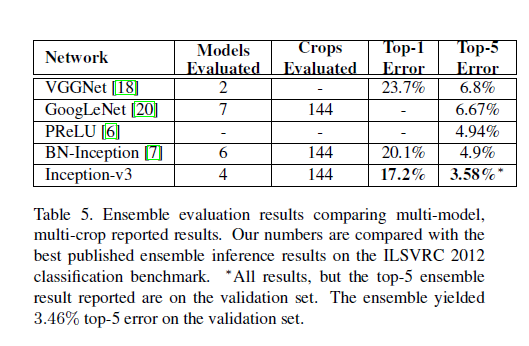
10 v3
conclusion
- Authors
- Abstract
- Introduction
- General design principles
- 1 Aviod representational bottlenecks especially early in the network
- 2 Higher dimensional representations are easier to process locally within a network
- 3 Spatial aggregation can be done over lower dimensional embeddings wihout much or any loss in representational power
- 4 balance the width and depth of the network
- faxtorizing convolutions with large filter size
- uility of auxiliary classifiers
- efficent grid size reduction
- Inception v2
- model regularization via label smoothing
- training
- lower resolution input
- v3
- conclusion

















 934
934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









