







 本文详细阐述了稳定性和有界性两个概念的不同定义及其在系统控制中的应用。包括稳定、渐进稳定、一致有界及最终一致有界等概念,并对比了它们之间的差异。特别强调了在面对确定性与不确定性系统时如何选择合适的概念。
本文详细阐述了稳定性和有界性两个概念的不同定义及其在系统控制中的应用。包括稳定、渐进稳定、一致有界及最终一致有界等概念,并对比了它们之间的差异。特别强调了在面对确定性与不确定性系统时如何选择合适的概念。
第一组概念:稳定&渐进稳定
定义1(stable):平衡点 x=0 在 t0 时刻是稳定的,如果对于任意 ϵ>0 ,存在一个常数 δ(t0,ϵ)>0 使得
这里, x 是系统的状态向量。如果
定义2(asymptotically stable):平衡点 x=0 在 t0 时刻是渐进稳定的,如果存在一个常数 δ>0 ,使得
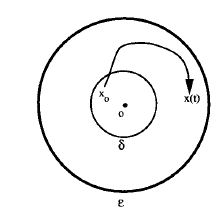
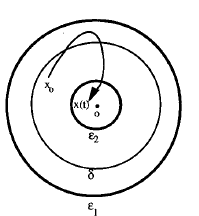
说明:对于定义1, δ 的选取应该不大于给定的常数 ϵ 。 而在通常情况下, δ 往往远小于 ϵ 。其实,稳定性的物理意义也就是说,系统有个初始状态 x(t0) ,在某一输入的驱动下,系统从这一初始状态运动到末态 x(t) 。现在, 如果有扰动使系统的初始状态在 ∥x(t0)∥<δ 的这一小范围内发生偏离,若系统的终态仍能回到给定的 ∥x(t)∥<ϵ 范围内,那么就说 x=0 这一点是稳定的。当然,初态能够偏离的范围 δ 的大小与你给定的末态偏离范围 ϵ 有关。渐进稳定首先是稳定的,并且当t趋于无穷时,若系统的初始状态在 ∥x(t0)∥<δ 范围内,系统的终态都会回到零点。可见,渐进稳定比稳定对系统的要求要严格地多,前者要求系统的末态趋于一个点,而后者只需使末态在某个范围内;前者要求末态趋近的这一点必须是零点,后者只需使末态所在的范围是零点周围的一个区域。这就是stable与asymptotically stable的区别。
第二组概念:一致有界&最终一致有界
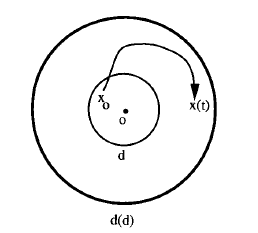
定义3(uniformly bounded):描述系统的微分方程的解为
x
,且
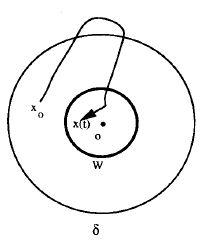
定义4(ultimately uniformly bounded):描述系统的微分方程的解为 x ,且
成立。这里 W 可能与
说明:定义4中的集合
W
通常是用以原点为球心、
描述上述四中稳定性的二维图形(a,b,c,d从左至右,从上到下)分别如下所示:
两组概念有什么区别?
从图中可以发现,一致稳定与一致有界类似,而一致渐进稳定和一致最终有界类似。上述两组概念都能描述系统的稳定性,那么何时用第一组概念?何时用第二组概念?
注意,Lypunov稳定性都是针对平衡点定义的。定义1、2中首先就说了系统的平衡点是原点,然后才陈述在什么条件下这个平衡点是稳定的。也就是说,用Lypunov理论讨论系统的稳定性时,实质讨论的是关于这一平衡点的稳定性,如果系统在这一平衡点处受到扰动,但仍能回复到指定的范围内,那么系统关于这一平衡点就是稳定的。
但是,对于一些包含未知扰动量的不确定系统,也就是在鲁棒控制(robust control)中讨论的一些系统,系统的平衡点是无法确定的,因此第一组中针对平衡点的定义对这些不确定系统(uncertain system)就变得毫无意义。因为系统在不确定量的扰动下,可能根本就没有平衡点。所以对这一类uncertain system稳定性的分析,就可以通过微分方程的解与原点的接近程度来描述。这样,就引出了第二组概念UB和UUB。也就是说,第二组概念是专门用来分析不确定系统的稳定性的。
总结
- 稳定和渐进稳定是描述具有平衡点的确定系统的稳定性的,讨论的是系统受到扰动后回复到平衡点的能力
- UB和UUB是描述鲁棒控制中不确定系统的稳定性的,讨论的是微分方程的解与原点的接近程度
渐进稳定要求系统的末态趋于零点,稳定只需使末态保持在某个范围内,且该范围远大于初态所约束的范围
UUB要求系统末态所在的超球半径远小于初态所在的超球半径,即UUB是比UB要求更严格的一种稳定性。
在实际中,UUB是不确定系统所能达到的最好的稳定性。
上述纯属个人理解,如有错误,非常欢迎大家指出,共同进步!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









