







0. 参考文献
【1】https://zhuanlan.zhihu.com/p/58738073
这个文章写的已经非常透彻了,没什么好说的,本文全文摘抄
1. 什么是平衡点
看一个倒立摆的例子:
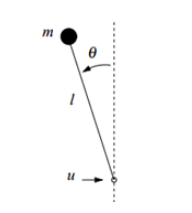
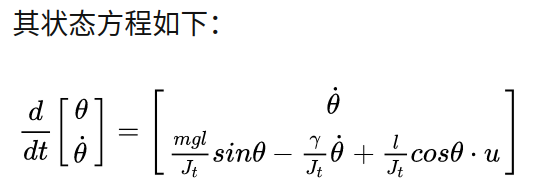
这个倒立摆的状态方程第一行,没什么好说的,状态量就角度和角速度。
第二行,对小球进行受力平衡分析把
J
t
J_t
Jt乘过去就比较容易看出来了

注意上面这一段,将输入设成0,也就是0输入系统,会自然进行摆动
因为很多量都是常数,所以作者自己造了一个火箭:


这里其实也可以拿手画,就是比较复杂
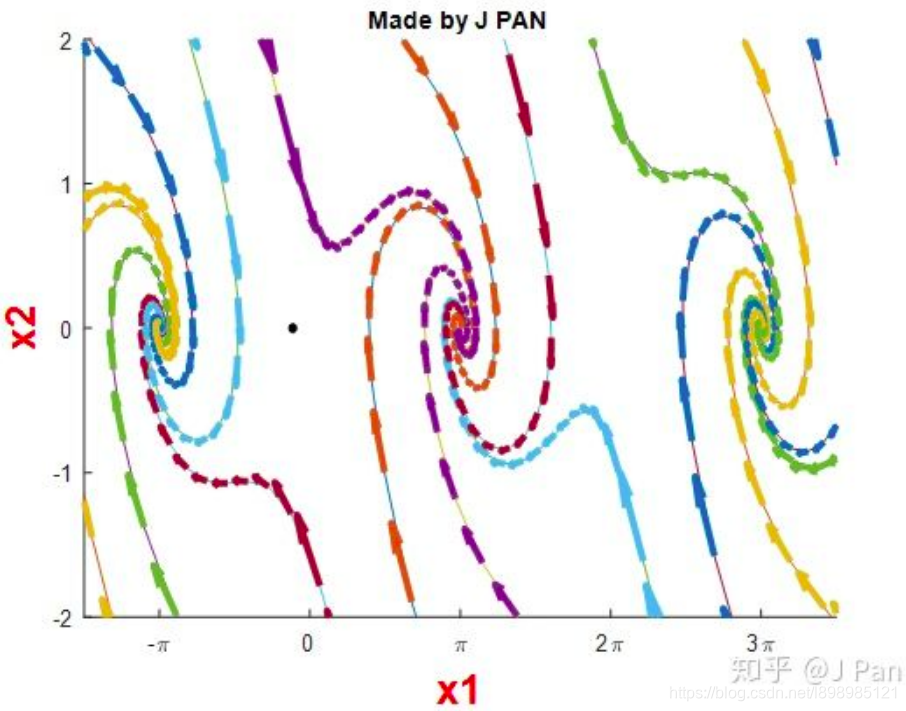

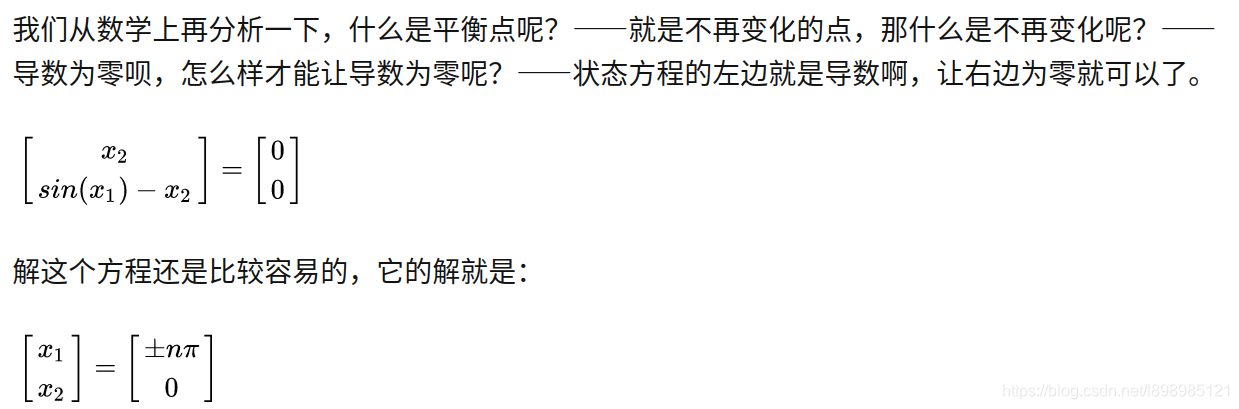
上面关于平衡点的解释还是非常直观的,状态方程左侧都是状态的导数,右侧都是状态的函数,我们只要在图上选一个状态点,根据状态点,求出在该状态下的,状态的导数,就是那个图上的箭头。同样的,我们要找平衡点,就是让导数等于零,然后取求解状态

上面这一段,还有下面的描述是不是有点问题啊?不是竖直放置不稳定,是竖直向上放置不稳定,竖直向下放置稳定
下面这一段中不是火箭水平躺着,是火箭竖直向下

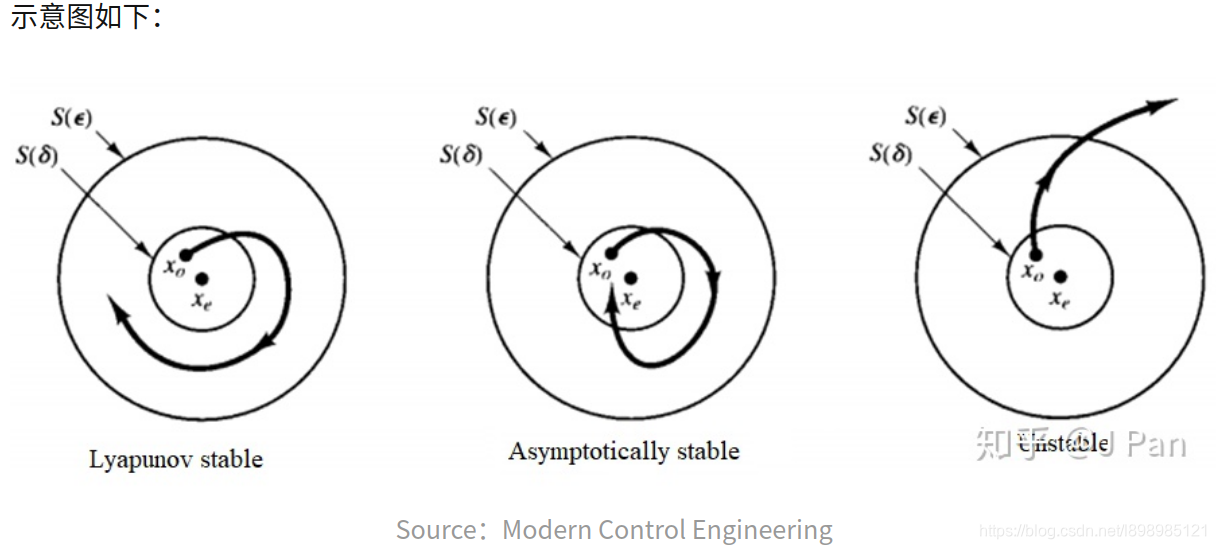
2. 什么是李雅普诺夫稳定

李雅普诺夫稳定性理论研究的是在扰动下平衡点的稳定性问题。
受到扰动,停留在“附近”

受到扰动,“收敛”到平衡点

受到“任何”扰动,“收敛”到平衡点

受到扰动,偏离平衡点

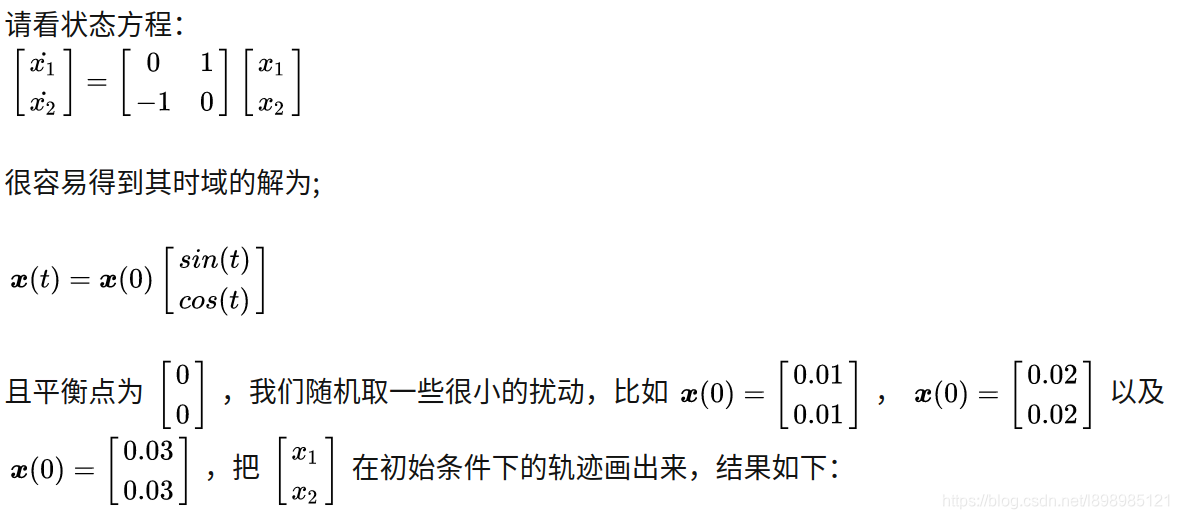
2.1 李雅普诺夫稳定
这是一个线性系统
真的这么容易吗,看来又要复习了
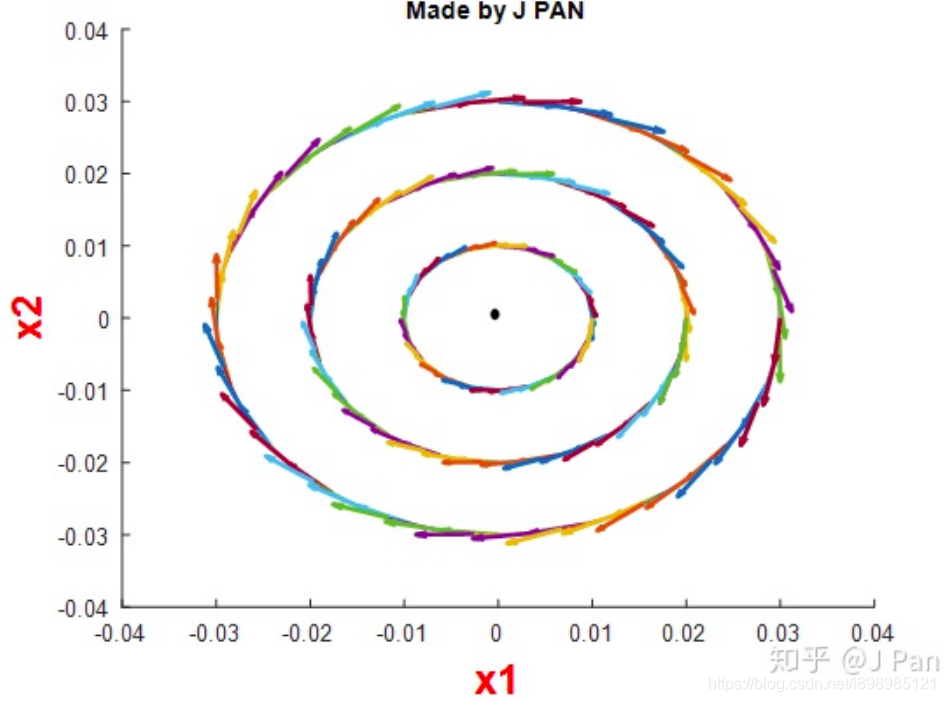

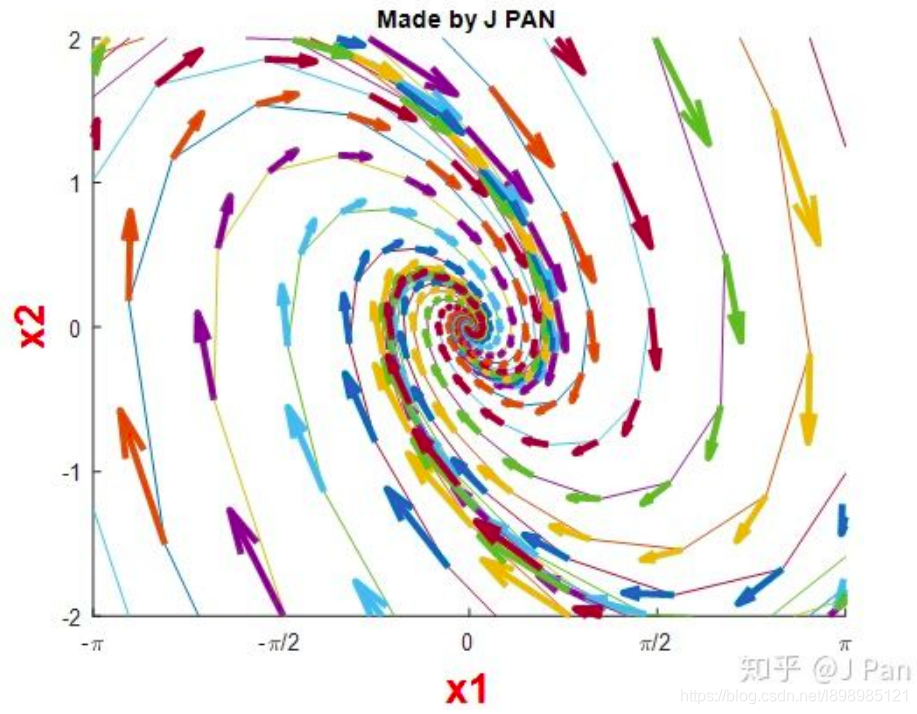
下面这个关键的来了

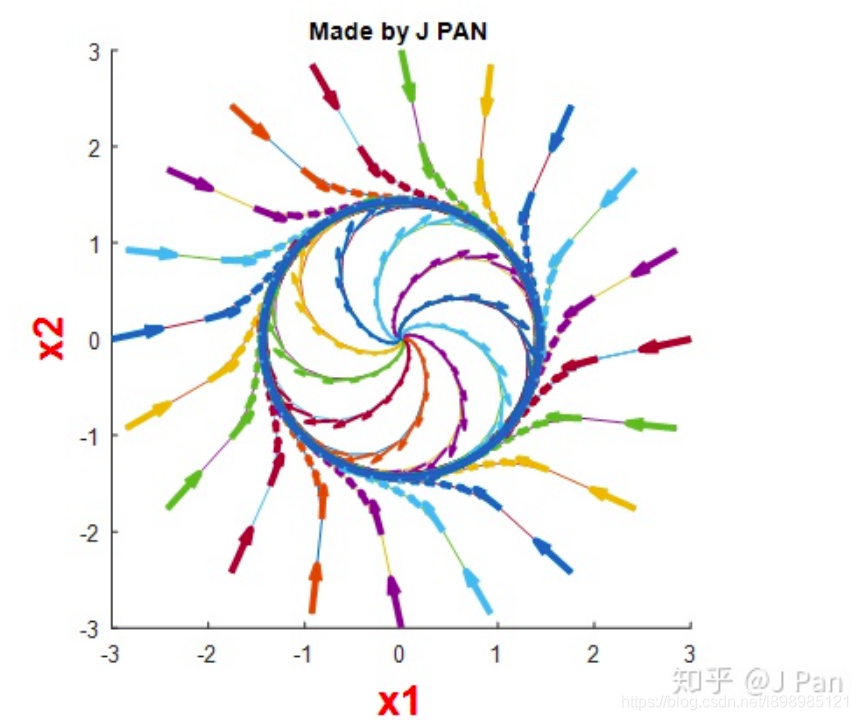
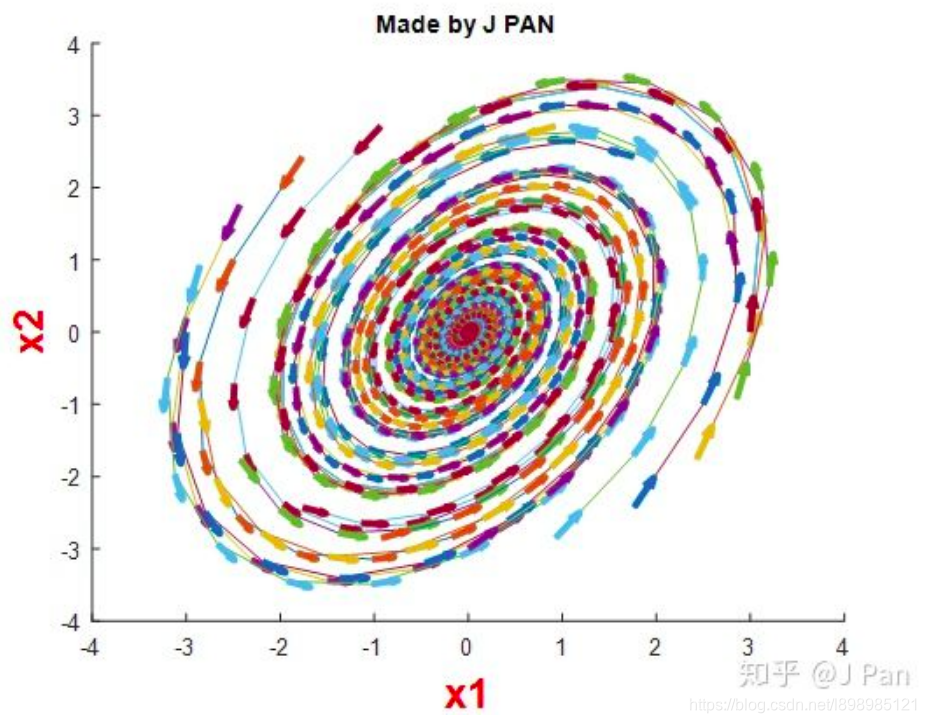
上面这个例子是里面的向外走,外面的向里走,共同走到同一个圈上
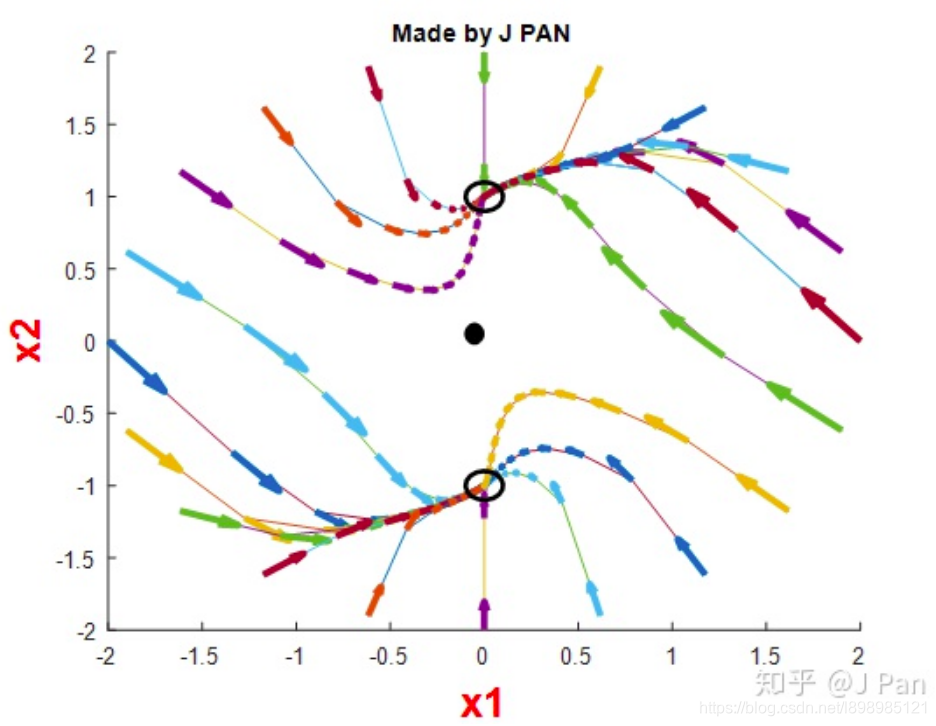
2.2 渐进稳定
2.3 大范围渐进稳定
注意下面这两个结论

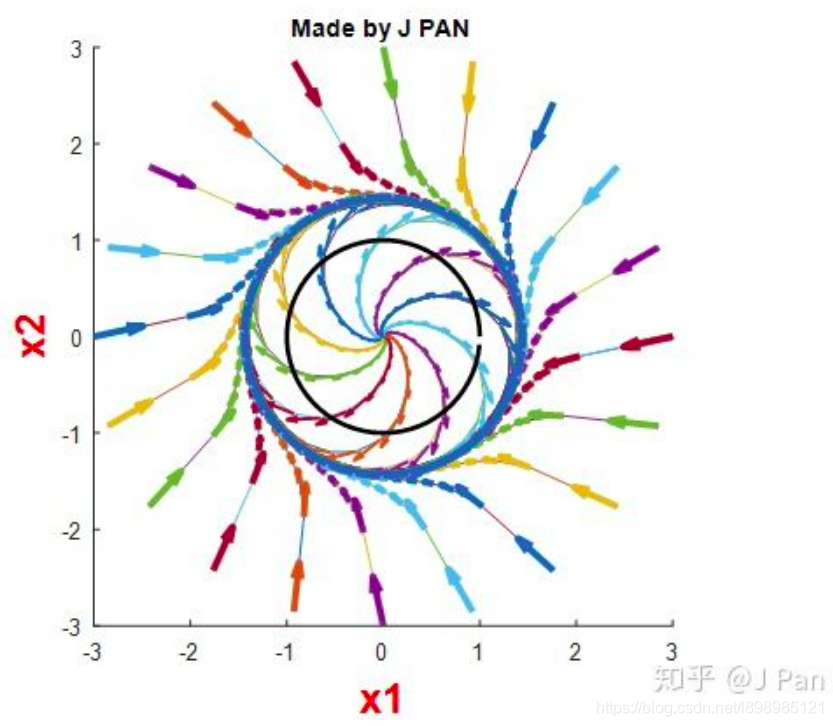
2.4 不稳定


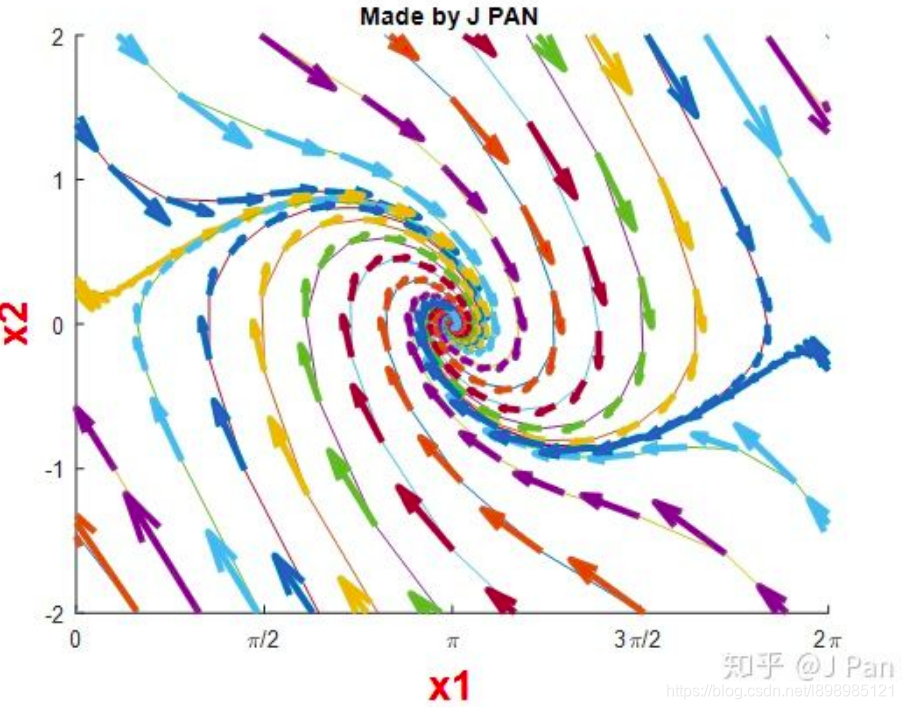
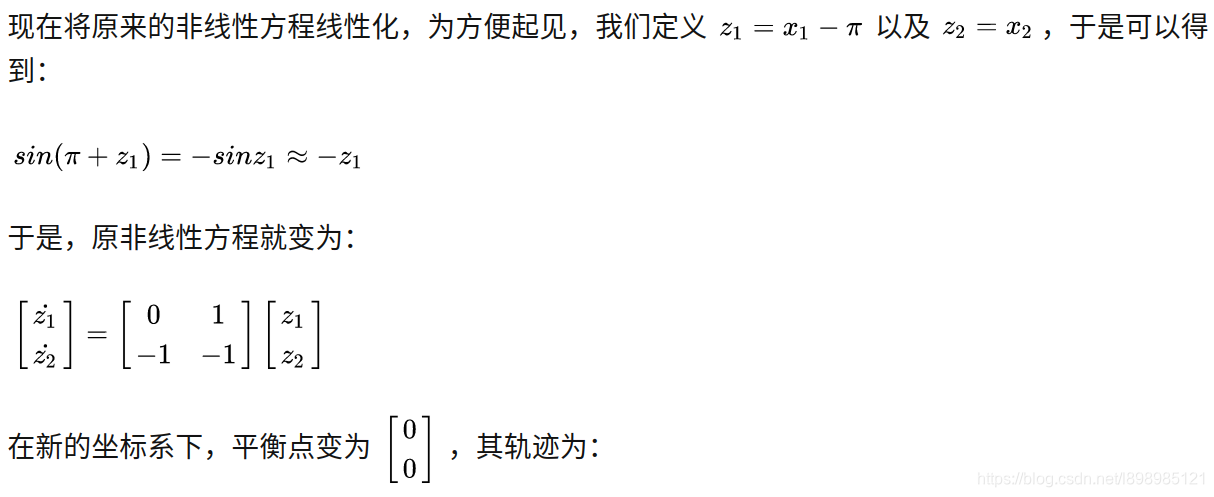
3. 李雅普诺夫第一法
在平衡点附近线性化
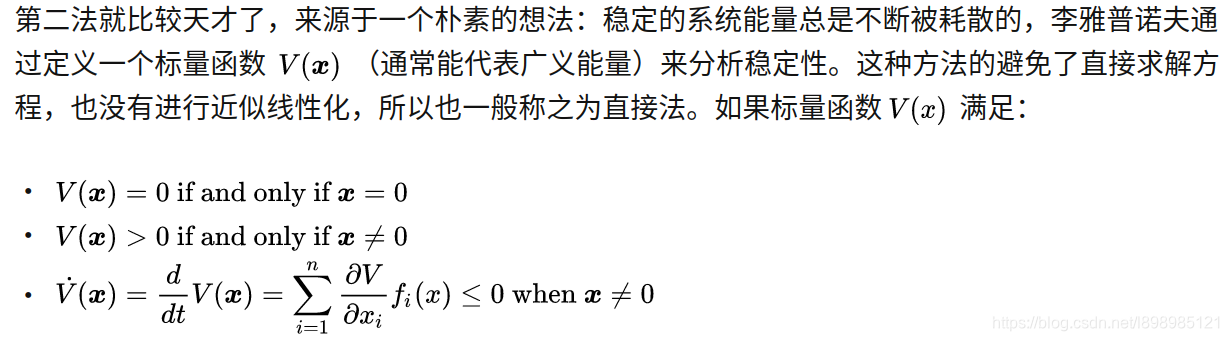
4. 李雅普诺夫第二法
注意这个标量函数的一些条件:首先这个标量函数是状态量的函数,并且在x!=0时是非负的,如果这个标量函数对时间的求导小于等于0。那么就是李雅普诺夫稳定的
注意这个标量函数,要我们自己取找才行,并且找到一个就行,不用找很多

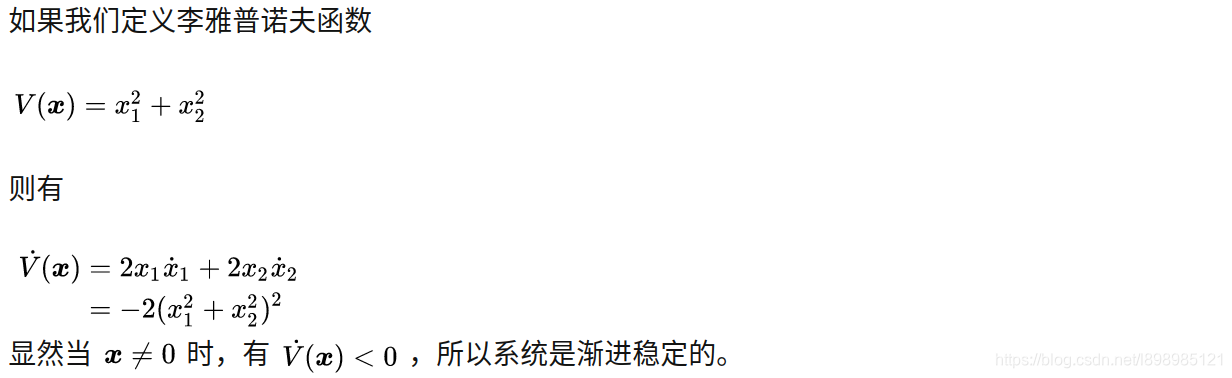
注意看上面,这个李雅普诺夫函数是我们自己选的,然后自己去试试导数行不行


















 1247
1247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









