







这里写自定义目录标题
如图所示的三个曲面,小球均处于平衡点,考虑其受扰动作用,自平衡点偏离后的系统响应。
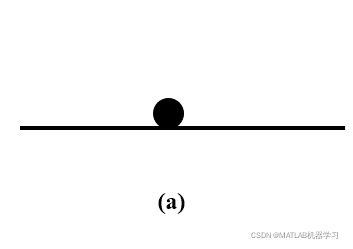
平衡点a:受扰动作用使得小球偏离原平衡点,并且使得小球达到另一个平衡点,小球的状态是自由响应且有界。
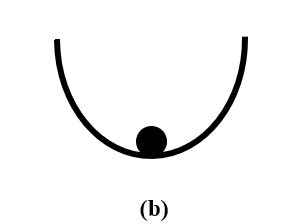
平衡点b:考虑有摩擦,小球绕原点平衡点将产生衰减振荡,小球的状态是自由响应且有界的,并且将最终返回自由平衡点。
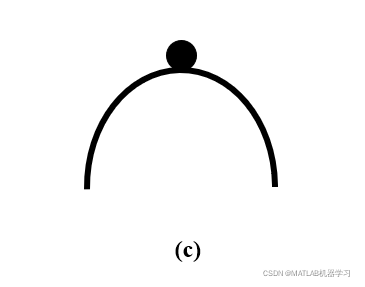
平衡点c:倘若受扰动作用使得小球偏离原平衡点,那么小球不一定能够达到下一个平衡点,那么就称小求的状态是自由响应且无界的。
1.稳定
1.1定义
设系统的初始状态 x 0 x_0 x0处在状态空间中,位于以平衡状态 x e x_e xe为球心,半径为 δ \delta δ的闭球域(Spherical Domain) S ( δ ) S(\delta) S(δ)内,即
∥ x 0 − x e ∥ ≤ δ , t ≥ t 0 \lVert x_0-x_e \rVert \le \delta ,t\ge t_0 ∥x0−xe∥≤δ,t≥t0
若系统由初始状态 x 0 x_0 x0出发的系统自由响应 x ( t ; x(t; x(t; x 0 x_0 x0 , , , t 0 t_0 t0 ) ) )在 t → ∞ t\rightarrow\infty t→∞的过程中以平衡状态 x e x_e xe
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 8873
8873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











