







 本文介绍如何使用Arduino控制SG90舵机,重点讲解了信号线、VCC和GND的连接,并通过Mind+平台展示了将舵机连接到七号引脚并设置转动角度的代码示例。
本文介绍如何使用Arduino控制SG90舵机,重点讲解了信号线、VCC和GND的连接,并通过Mind+平台展示了将舵机连接到七号引脚并设置转动角度的代码示例。
这里使用SG90(360°)舵机。
黄线为信号线(DIGITAL),
红线为(VCC),
棕线为负极(GND)。
本人较懒,用的是Mind+。
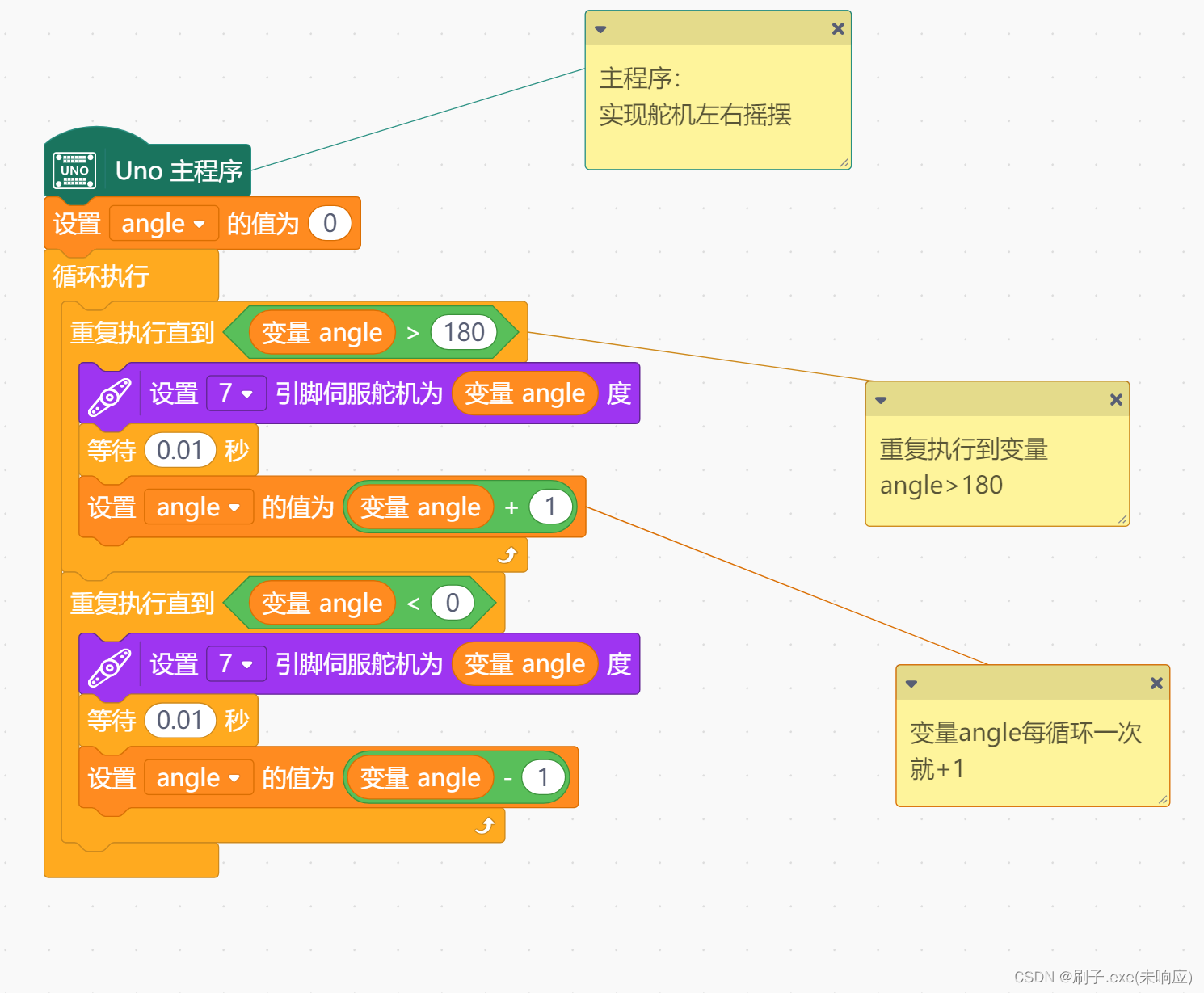
转换成代码如下↓
/*
* 主程序:
* 实现舵机左右摇摆
*/
#include <DFRobot_Servo.h>
// 动态变量
volatile float mind_n_angle;
// 创建对象
Servo servo_7;
// 主程序开始
void setup() {
servo_7.attach(7);
mind_n_angle = 0;
}
void loop() {
// 重复执行到变量angle>180
while (!(mind_n_angle>180)) {
servo_7.angle(abs(mind_n_angle));
delay(10);
// 变量angle每循环一次就+1
mind_n_angle = (mind_n_angle + 1);
}
while (!(mind_n_angle<0)) {
servo_7.angle(abs(mind_n_angle));
delay(10);
mind_n_angle = (mind_n_angle - 1);
}
}
这里UP用的是七号引脚【servo_7.attach(7);】
【servo_7.angle(abs(180));】这句话使它转动。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1093
1093

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









